
XRacer V1 .. ein Micro Pixhawk Derivat aus Bulgarien : Neue Technologie auf 36x36mm !
- Themenstarter gervais
- Beginndatum
Hi guys,
Some update to Pixracer V1 and ACSP4.....all they are in our hands and are under tests.
We'll start fulfilling the preorders this week. Also, you may be interested in a new thread, opened by Lorenz Meier - http://fpv-community.de/showthread....ntroller-amp-GUI-Pixracer&p=909745#post909745
The EU preorders will be fulfilled by me and a delivery refund to EU customers will be performed along with the dispatches.
Best regards
Nick
Some update to Pixracer V1 and ACSP4.....all they are in our hands and are under tests.
We'll start fulfilling the preorders this week. Also, you may be interested in a new thread, opened by Lorenz Meier - http://fpv-community.de/showthread....ntroller-amp-GUI-Pixracer&p=909745#post909745
The EU preorders will be fulfilled by me and a delivery refund to EU customers will be performed along with the dispatches.
Best regards
Nick
Hi Nick,
it is excellent news that shipping of the Pixracer starts now! Regarding the link to the other thread i have some questions:
a.) does that mean Pixracer currently runs only with the PX4 flight stack? (GUI: QGorundControl)
b.) does it also run with the latest APM flightstack e.g. Arducopter 3.3x? (GUI: Mission Planner)
c.) Which software comes pre-installed with Pixracer? PX4 or APM?
d.) Which of the above do you recommend?
e.) Is there a HowTo how to flash firmware to the Pixracer ... and ...
f.) Is there a ready-made manual/documentation available already?
Thanks and best regards!
( Hopin' to see my two Pixracers and ACSP4s in the Mail soon! -- 2 projects are on hold because of waiting for it for too long now)
it is excellent news that shipping of the Pixracer starts now! Regarding the link to the other thread i have some questions:
a.) does that mean Pixracer currently runs only with the PX4 flight stack? (GUI: QGorundControl)
b.) does it also run with the latest APM flightstack e.g. Arducopter 3.3x? (GUI: Mission Planner)
c.) Which software comes pre-installed with Pixracer? PX4 or APM?
d.) Which of the above do you recommend?
e.) Is there a HowTo how to flash firmware to the Pixracer ... and ...
f.) Is there a ready-made manual/documentation available already?
Thanks and best regards!
( Hopin' to see my two Pixracers and ACSP4s in the Mail soon! -- 2 projects are on hold because of waiting for it for too long now)
So, currently Pixracer V1 runs only with PX4 flight stack ( QGroundControl ), but we have been assured the MP flight stack will be ready soon.
I test the Pixracer with PX4
For the beginning, I'd recommend QGC, and when MP is able to support the Pixracer, one can choose.
About the manual....I'm working on it and it will be ready on Monday.
I test the Pixracer with PX4
For the beginning, I'd recommend QGC, and when MP is able to support the Pixracer, one can choose.
About the manual....I'm working on it and it will be ready on Monday.
Sounds really good. I hope the APM/MP stack comes around soon (R_Lefebvre mentioned on RCG that they might push an early 3.4 RC with Pixracer support), I don't really want to start experimenting with a flight software that I've never used before.
BTW, the new thread you linked above was deleted. You might want to contact the admins about that, or make one yourself.
BTW, the new thread you linked above was deleted. You might want to contact the admins about that, or make one yourself.
Nick hat eine Einigung mit der FPVC dass er gewerbliche Threads hier haben darf, soviel weiß ich (sonst wäre der AUAV-X2 Thread schon lange weg). Vermutlich war das ein Mißverständnis weil jemand anders als Nick den Thread erstellt hatte bzw. kein direkter Bezug herzustellen war, und der Moderator vom Dienst etwas trigger-happy gewesen ist.
Ich habe den X2 Thread /Eingang, der kein gewerblicher ist (sonst wären das sämtliche meiner Produktvorstellungen und Bauanleitungen für Noobs), weder in Absprache mit Nick Arsov noch der FPVC eröffnet, gestaltet und geschrieben. Mir haben die Jungs, die heimlich und erfolglos ihre Produkte auf diy drones versteckt haben...einfach leid getan und mir gefiel der X2
Und natürlich war mein Engagement unentgeltlich. Ich bekam / bekomme auch keine Gratis Muster. Nick Arsov hat mich noch nicht einmal bei den ersten XRacer Boards gefragt, ob ich gerne eins hätte.
PS: Mich hat auch keiner aufgefordert, es zu unterlassen auf diese Weise potentiell "Gratis Werbung" für Produkte zu machen, die ich mag.
@gervais:
Mal wieder was zum Thema, was mit Deinem Thread ebenfalls gelöscht wurde:
Wie empfindlich ist der PX4 Stack eigentlich gegenüber Kompassproblemen? Die APM-Software mag das wohl nicht besonders, ähnlich wie die Naza.
Hintergrund ist, ich habe einen Mariner II / SplashDrone. Da gab es bei anderen mit Naza und Pixhawk-Derivat Crashs. Die GPS-Antenne mit Kompass sitzt halt innerhalb des wasserdichten Rumpfes und somit relativ dicht an stromführenden Leitungen.
Deshalb habe den meinen mit dem MiniX von XAircraft ausgerüstet, der gegenüber Kompassfehlern relativ immun ist und ggf. einfach in Atti zurück fällt und selbst ohne Kompass immer noch RTH-fähig ist. Das scheint mir bisher ein Alleinstellungsmerkmal zu sein.
Da aber XAircraft Support und Weiterentwicklung offensichtlich eingestellt hat, halte ich immer die Augen für eine Alternative offen.
Wie sieht's also mit Deiner Lösung aus?
Gruß Gerd
Mal wieder was zum Thema, was mit Deinem Thread ebenfalls gelöscht wurde:
Wie empfindlich ist der PX4 Stack eigentlich gegenüber Kompassproblemen? Die APM-Software mag das wohl nicht besonders, ähnlich wie die Naza.
Hintergrund ist, ich habe einen Mariner II / SplashDrone. Da gab es bei anderen mit Naza und Pixhawk-Derivat Crashs. Die GPS-Antenne mit Kompass sitzt halt innerhalb des wasserdichten Rumpfes und somit relativ dicht an stromführenden Leitungen.
Deshalb habe den meinen mit dem MiniX von XAircraft ausgerüstet, der gegenüber Kompassfehlern relativ immun ist und ggf. einfach in Atti zurück fällt und selbst ohne Kompass immer noch RTH-fähig ist. Das scheint mir bisher ein Alleinstellungsmerkmal zu sein.
Da aber XAircraft Support und Weiterentwicklung offensichtlich eingestellt hat, halte ich immer die Augen für eine Alternative offen.
Wie sieht's also mit Deiner Lösung aus?
Gruß Gerd
Keine Lösung Gerd, die AC Software ist extrem empfindlich gegenüber hohen MAG Offsets. Verdrillen von Leitungen, möglichst kurze I²C Leitungen usw. sind Dir ja bekannt. Compassmot hilft nur bedingt linearen Abweichunge bei hohen Strömen ab. Wenn die XYZ Basis statt einem Ball eher einen Football oder gar einer Erdnuss ähnelt, werden diese nicht linearen Verzerrungen imo nicht korrigiert. Wenn ich eine Splash Drone bauen würde, bekäme diesen einen Pimmel (äh Stab) mit GY-281 MAG Board in PU gekapselt. Analog zum MAG am Landebein des Phantom.
Zuletzt bearbeitet:
OK, habe etwas weiter zu dem Thema APM/MP Software auf dem Pixracer recherchiert. Folgende Ergebnisse:
- R_Lefevbre meldet, dass der aktuelle master-Branch (dev) von APM bereits Support für den Pixracer drin hat, und dass ein 3.4 RC1 in "wenigen Wochen" rauskommen könnte.
- Für den master-Branch gibt es "latest" Builds in der Firmware-Repository auf DIYDrones, aber keine für den "px4-v4" Target, welches dem Pixracer entspricht. Sprich, im Moment muss man den Quellcode manuell kompilieren und die Datei dann mit dem Mission Planner aufs Board uploaden. Generelle Build-Anleitungen findet man unter http://dev.ardupilot.com/wiki/building-the-code/, spezifisch für Windows ist das hier relevant: http://dev.ardupilot.com/wiki/building-px4-with-make/. Die richtige Binary lässt sich mit "make px4-v4" erzeugen.
- Auf RCG hieß es von einem Mitglied, der Code läuft auf seinem Proto-XRacer, aber lässt den ACC nicht kalibrieren, und das Blinken des Arming-Schalters sei auch nicht korrekt (Beitrag-Link). Vermutlich ist der Code also noch nicht wirklich stable.
Mein Plan ist jetzt wie folgt: Lieferung des Pixracer abwarten und weitere Entwicklung im APM Code beobachten. Erstflug werde ich vermutlich erst unternehmen, wenn die 3.4-RC1 draußen ist. Bis dahin versuche ich den selbst kompilierten master-Code aufs Board zu spielen und zumindest grundlegende Konfiguration und Bodentests damit zu machen.
- R_Lefevbre meldet, dass der aktuelle master-Branch (dev) von APM bereits Support für den Pixracer drin hat, und dass ein 3.4 RC1 in "wenigen Wochen" rauskommen könnte.
- Für den master-Branch gibt es "latest" Builds in der Firmware-Repository auf DIYDrones, aber keine für den "px4-v4" Target, welches dem Pixracer entspricht. Sprich, im Moment muss man den Quellcode manuell kompilieren und die Datei dann mit dem Mission Planner aufs Board uploaden. Generelle Build-Anleitungen findet man unter http://dev.ardupilot.com/wiki/building-the-code/, spezifisch für Windows ist das hier relevant: http://dev.ardupilot.com/wiki/building-px4-with-make/. Die richtige Binary lässt sich mit "make px4-v4" erzeugen.
- Auf RCG hieß es von einem Mitglied, der Code läuft auf seinem Proto-XRacer, aber lässt den ACC nicht kalibrieren, und das Blinken des Arming-Schalters sei auch nicht korrekt (Beitrag-Link). Vermutlich ist der Code also noch nicht wirklich stable.
Mein Plan ist jetzt wie folgt: Lieferung des Pixracer abwarten und weitere Entwicklung im APM Code beobachten. Erstflug werde ich vermutlich erst unternehmen, wenn die 3.4-RC1 draußen ist. Bis dahin versuche ich den selbst kompilierten master-Code aufs Board zu spielen und zumindest grundlegende Konfiguration und Bodentests damit zu machen.
XRacer V1 .. ein Micro Pixhawk Derivat aus Bulgarien : Neue Technologie auf 3...
guter plan... mein Pixracer wird dann auch erstmal "grounded" bleiben.... das ist mir in einem 2000€ Einzelstück Copter (in den noch dazu hunderte Stunden Fertigungsarbeit reingegangen sind) dann doch zu heiss mit einem komplett neuen Flightstack... nix gegen den PX4 Stack, den werde ich bei zeiten auch ausprobieren... aber erstmal hätte ich gerne etwas Vertrautes bei dem ich Stärken und Schwächen kenne.
guter plan... mein Pixracer wird dann auch erstmal "grounded" bleiben.... das ist mir in einem 2000€ Einzelstück Copter (in den noch dazu hunderte Stunden Fertigungsarbeit reingegangen sind) dann doch zu heiss mit einem komplett neuen Flightstack... nix gegen den PX4 Stack, den werde ich bei zeiten auch ausprobieren... aber erstmal hätte ich gerne etwas Vertrautes bei dem ich Stärken und Schwächen kenne.
Keine Lösung Gerd, die AC Software ist extrem empfindlich gegenüber hohen MAG Offsets....
Ist die Behebung dieser Schwäche bei einem der beiden Teams ein Thema in naher Zukunft?
Ich habe den MiniX derzeit recht gut im Griff und seit einigen kleinen Änderungen keine Zwangs-Umschaltung auf Atti mehr gehabt. Werde dann wohl bei ihm bleiben müssen. Extern anbauen möchte ich nichts, wenn es sich vermeiden lässt...
Gruß Gerd
Neues zum ACSP4 Powermodul
Das ACSP4 Powermodul ist da.
Die Katze ist aus dem Sack, der erste Batch fertig:
Aufgeräumt, passend zum Pixracer Lochmass
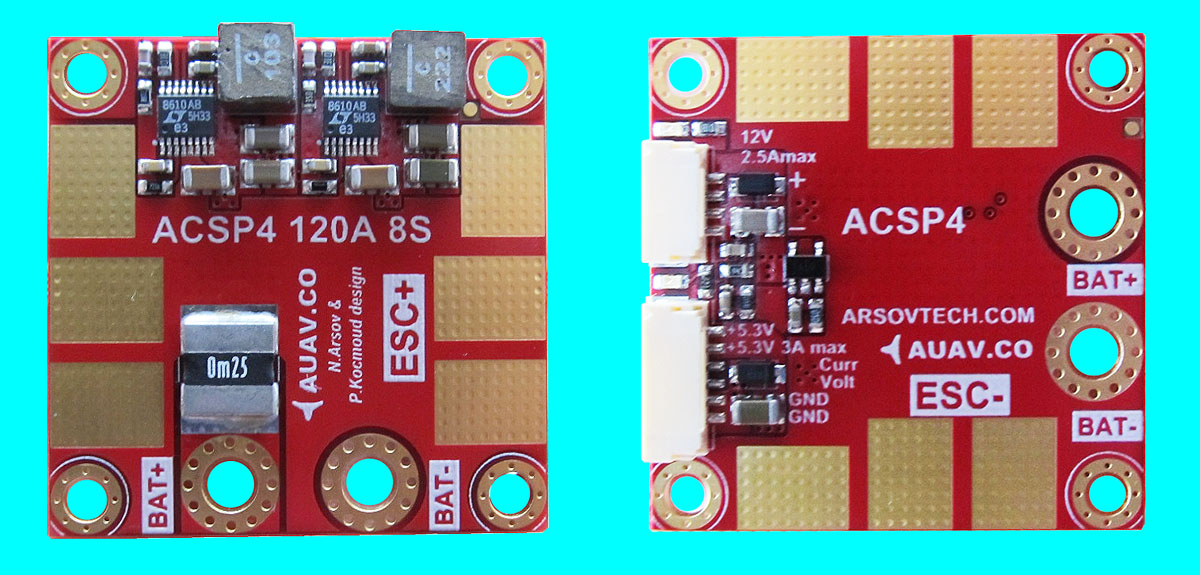
Technische Daten:
- Batteriespannung > 8-9S , 10S burst
- Max. Strom - 90A getestet, 120A burst gekühlt (Luftstrom) ( nicht getestet )
- BEC 5.3V 3A FC Versorgung (Betrieb ab 3S)
- BEC 12V 2A für Video usw. (Betrieb ab 4S)
- Spannungs und Stromsensor
- 12V Kabel inkl. ( 2 x Kabel kommen mit dem Pixracer V1 )
- Abmessungen - 36x36x11mm, 30.5x30.5mm Lochmass mit 4x3.2mm Bohrungen
- Gewicht - 8g
- JST GH Anschluss für 5.3V,Spannungs und Stromsensor
- JST GH Anschluss für 5.3V for 12V
- DC-DC Regler mit 2 x LT5610AB ( Ultra low ripple/noise with ECO power saving burst mode with light loads ).
Das ACSP4 Powermodul ist da.
Die Katze ist aus dem Sack, der erste Batch fertig:
Aufgeräumt, passend zum Pixracer Lochmass
Technische Daten:
- Batteriespannung > 8-9S , 10S burst
- Max. Strom - 90A getestet, 120A burst gekühlt (Luftstrom) ( nicht getestet )
- BEC 5.3V 3A FC Versorgung (Betrieb ab 3S)
- BEC 12V 2A für Video usw. (Betrieb ab 4S)
- Spannungs und Stromsensor
- 12V Kabel inkl. ( 2 x Kabel kommen mit dem Pixracer V1 )
- Abmessungen - 36x36x11mm, 30.5x30.5mm Lochmass mit 4x3.2mm Bohrungen
- Gewicht - 8g
- JST GH Anschluss für 5.3V,Spannungs und Stromsensor
- JST GH Anschluss für 5.3V for 12V
- DC-DC Regler mit 2 x LT5610AB ( Ultra low ripple/noise with ECO power saving burst mode with light loads ).
Zuletzt bearbeitet:
Sieht sehr gut aus, freue mich den mit vorbestellt zu haben ")
Ist die gesamte Bauhöhe (mit den Buchsen und BEC-Komponenten) vom ACSP4 bekannt? Ich werde versuchen ihn ins 8mm hohe Unterdeck des QR400 zu verbauen, und bin gespannt ob das hinhaut. Die ESC-Stromleitungen müssen ja schon mal beidseitig angelötet werden wie's aussieht (+ auf der Oberseite, - auf der Unterseite).
Edit Habe kurz über JST-GH recherchiert - die Buchse ist ja alleine schon 4.35mm hoch Dazu kommt die Platinendicke und die Bauhöhe der Komponenten auf der Unterseite... könnte echt knapp werden.
Ist die gesamte Bauhöhe (mit den Buchsen und BEC-Komponenten) vom ACSP4 bekannt? Ich werde versuchen ihn ins 8mm hohe Unterdeck des QR400 zu verbauen, und bin gespannt ob das hinhaut. Die ESC-Stromleitungen müssen ja schon mal beidseitig angelötet werden wie's aussieht (+ auf der Oberseite, - auf der Unterseite).
Edit Habe kurz über JST-GH recherchiert - die Buchse ist ja alleine schon 4.35mm hoch
Dazu kommt die Platinendicke und die Bauhöhe der Komponenten auf der Unterseite... könnte echt knapp werden.
Ich tippe, dass man die PX4Stack /QGround Doku demnächst aktualisieren und aufbereiten wird, da tut sich doch was. Wir könnten hier im Forum wirklich jemanden brauchen, der das Thema etwas begleitet.
Vielleicht überdenke ich meinen Plan und probiere doch erstmal den PX4 Stack auf dem Pixracer aus
Wenn das der Fall ist, bin ich bereit meine Erkentnisse davon im Forum aufzubereiten - vllt. lohnt sich dann ein eigener Thread für den PX4 Stack hier im APM-Bereich.Das wäre super. Es gibt ja im deutschsprachigen Raum keine Anlaufstelle für den native Stack.
Das ACSP4 Board ist übrigens ca. 10.7 mm hoch und wiegt 7.8g.
@careyer: Ich würde neue HW ohnehin nicht in einem 2k€ Vogel testen. Der PX4 Stack "Risiko" Anteil ist dabei genauso groß bzw. klein wie beim AC Stack, vermutlich anfänglich sogar geringer. Da hier ja auch jegliche APM Kompatibilitätsanforderungen entfallen, potentiell auch deutlich schlanker.
Das ACSP4 Board ist übrigens ca. 10.7 mm hoch und wiegt 7.8g.
@careyer: Ich würde neue HW ohnehin nicht in einem 2k€ Vogel testen. Der PX4 Stack "Risiko" Anteil ist dabei genauso groß bzw. klein wie beim AC Stack, vermutlich anfänglich sogar geringer. Da hier ja auch jegliche APM Kompatibilitätsanforderungen entfallen, potentiell auch deutlich schlanker.

