Ein "8 Zylinder" sollte es nun sein....aber deutlich unter 5kg bitte! Also habe ich mir diesen genialen Rahmen mit Lander geholt. Einen Bilderbaubericht gibt es von anderer Seite schon hier: rc-network.de/forum/showthread…ubina-X8-Bilderbaubericht
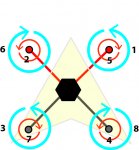
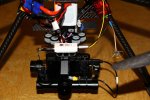
deshalb möchte ich nicht mehr im einzelnen darauf eingehen. Motor-Regler Aufbau ist bei mir identisch! Die Passgenauigkeit ist wirklich einzigartig! Die Spannkraft dieser genialen Carbonhalter ist unglaublich - da wackelt und folglich vibriert nichts!
Hier meine Ausstattung:
Rahmen und Lander rOsewhite Rubina X8
T-Motor 2216-12 / 800KV
Kiss 18A V1.2
Falcon / T-Motor 11 x 3.7
Naza M V2
IOSD Mini
Fatshark Video-Sender
RC Device HDMI Konverter
Walkera G3S Gimbal mit Phobotic Centerpice Controller
Sony RX 100 M3 mit Gentwire
Futaba T14SG
SLS Magnum 7000
Gesamtgewicht inkl. SLS 7000 liegt bei ca. 2750gr.
Durchschnittliche Stromaufnahme 365mA/min. Dadurch 15-16min Flugzeit mit ausreichend Reserve!
Die SLS Lipos bleiben bei einem Dauerentladestrom von 23A bis zur 3.4V Spannung und 6800maH bei einem max. Drift von 50mV, wobei der Drift alle 10 Ladungen geprüft wird um Schäden bei zu viel mAh-Entnahme zu vermeiden.

















deshalb möchte ich nicht mehr im einzelnen darauf eingehen. Motor-Regler Aufbau ist bei mir identisch! Die Passgenauigkeit ist wirklich einzigartig! Die Spannkraft dieser genialen Carbonhalter ist unglaublich - da wackelt und folglich vibriert nichts!
Hier meine Ausstattung:
Rahmen und Lander rOsewhite Rubina X8
T-Motor 2216-12 / 800KV
Kiss 18A V1.2
Falcon / T-Motor 11 x 3.7
Naza M V2
IOSD Mini
Fatshark Video-Sender
RC Device HDMI Konverter
Walkera G3S Gimbal mit Phobotic Centerpice Controller
Sony RX 100 M3 mit Gentwire
Futaba T14SG
SLS Magnum 7000
Gesamtgewicht inkl. SLS 7000 liegt bei ca. 2750gr.
Durchschnittliche Stromaufnahme 365mA/min. Dadurch 15-16min Flugzeit mit ausreichend Reserve!
Die SLS Lipos bleiben bei einem Dauerentladestrom von 23A bis zur 3.4V Spannung und 6800maH bei einem max. Drift von 50mV, wobei der Drift alle 10 Ladungen geprüft wird um Schäden bei zu viel mAh-Entnahme zu vermeiden.