Hi!
Hier ist richtig Schwung in der Bude!
@franko:
Gibt es schon ein Setting für das Crius SE V1.0 mit I2C und GPS, bzw. welchen Code soll ich da jetzt nehmen?
Final, Nazastyle...
Du kannst die Final3 oder die Testversionen nehmen. Immer draussen testen und den Waschzettel lesen.
Allgemein gültige Settings gibts so nicht. Mit den Alt Defaultpids sollte zumindest irgendwas passieren
")
.
FirN:
Ich glaube mit GPS war der Sketch zu groß, aber warten wir mal ab was Roberto schreibt.
Das betrifft nur den proMICRO, nicht den proMINI (crius), da der promicro nochmal 2-3Kb "verballert".
( P.s.: Habe vielleicht eine Möglichkeit gefunden 186 Bytes zu sparen...)
Scotch:
Also bei einem Arduino Pro Mini kann ich, in der Finale 3, GPS mit einbinden.
Binäre Sketchgröße: 25.372 Bytes (von einem Maximum von 30.720 Bytes)
Wenn ich mich richtig erinnere, lag es an der seriellen Übertragung der GPS Daten.
Da gab es dann wohl ein Timing Problem.
Ich weiß allerdings nicht, wie es bei I2C GPS aussieht.
Schwere Timingprobleme können NUR auftreten, wenn in der Test2 Version das aktiviert ist: //#define ConstantPID5000
UND gleichzeitig der serielle port bedient werden muss (telemetrie/ serielles gps bei megaboards etc). Wie es bei I2C GPS aussieht kann ich nicht sagen (keine Hardware), einfach constantpid NICHT aktivieren (auskommentiert lassen).
@Martinez:
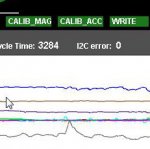
Das sieht wirklich übel aus. Ich habe grade meinen copter auch noch mal beklopft. Entsprechend kommen Wellenlinien aber keine Zufalls - Spikes! Irgendwie sieht das fast wie ein Wackelkontakt aus, nur der müsste doch eigentlich I2C Fehler machen? Mit diesen Spikes muss es Probleme geben. Gyrokorrektur und der Levelmode werden mit einem viel stärkeren LPF bedient, wahrscheinlich frisst der die Spikes weg, sonst hättest Du da auch schon etwas gemerkt. Vielleicht kann noch jemand mit der Crius AIO den Klopftest machen? Vielleicht Upapa?
Natürlich kannst Du auch einen weiteren Acc an den I2C bus hängen (andere Adresse!), so weit ich das sehe, wird die Mwii-soft das ohne Codeänderung nicht verarbeiten können. Die MPU wird als Komplettpaket abgehandelt.
Chipumlöten ist natürlich gefährlich und ein Riesenaufwand. Vielleicht ist es doch ein Wackler irgendwo. Einen Software - Spikefilter könnte man natürlich auch noch zaubern, wenn alle Hardwarestricke reissen. Es wäre wirklich toll, wenn jemand ggf. auch mit freeimu 0.4.3 den Klopftest machen könnte!
@staroman
Danke, für Deinen Test!
Aber auch unsere Version hier basiert auf der gleichen Logik. Ich versuche das ganze nur etwas benutzbarer / einfacher einstellbar zu machen.
@JinGej
Danke! Aber vielleicht kann man da doch etwas machen, mit einem ganz grossen Fragezeichen?
LG
Rob