
So, ich hab mich mal hingesetzt und eine Anleitung für den Copterbau mit modernen Sensoren/Komponenten geschrieben. Hier ist der erste Teil mit Erklärungen zu den verschiedenen Begriffen, Bauteilen und der Dimsionierung:
Einleitung
Multicopter erlangen immer größere Beliebtheit unter Modellbauern und ziehen auch Neulinge in ihren Bann. Aufgrund ihres leichten Aufbaus und der Open Soure Software steigt die Zahl der Copter-Begeisterten ständig an.
Das MultiWii-Projekt wurde von dem Franzosen Alexandre Dubus aus Paris im Sommer 2010 ins Leben gerufen und hat sich seit dem um einiges weiterentwickelt. Bei jeder neuen Version werden neue Funktionen hinzugefügt und neue Hardware unterstützt. Da beginnt auch ein häufiges Problem, fehlende Bauanleitungen für aktuelle Hardware.
Im Internet kursieren viele verschiedene Bauanleitungen für sämtliche Copter-Konfigurationen, sei es ein Quadrocopter oder ein schwerer Hexacopter. Das Problem mit diesen Anleitungen ist, dass die meisten von ihnen veraltet sind.
Mulitcopter erfreuen sich einer immer größeren Beliebtheit, was auch die Entwicklung neuerer Sensoren und fortschrittlicher Technik beschleunigt. Die in den vorhandenen Bauanleitungen benutzten Bauteile sind längst nicht mehr aktuell und im Vergleich zu den aktuellsten Modellen einfach nur schlecht.
Diese Anleitung befasst sich mit dem Aufbau eines großen Octocopters (für Kameraflüge und FPV) mit modernster Sensortechnik und Steuereinheiten. Anhand dieses Beispiels werden die verschiedenen Sensoren, ihre Funktions- und Wirkungsweise sowie dem Zusammenbau zu einer funktionstauglichen Coptersteuerung erklärt.
In der nachfolgenden Erklärung werden die Begriffe „stark veraltet“, „antik“ usw. benutzt. Die beschriebenen Techniken stammen keineswegs aus der Antike, es handelt sich nur um wenige Jahre, die in diesem Bereich des Modellbaus jedoch riesige Unterschiede ausmachen.
Wie ist ein z.B. Quadrocopter aufgebaut und wie steuert man ihn?

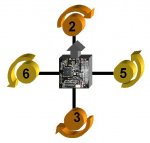
Der Copter besteht nur aus Motoren und kommt komplett ohne Zusatzrotoren oder Steuerflächen aus. Sämtliche Bewegungen werden durch Änderungen der Drehzahlen verschiedener Motoren hervorgerufen. Um bei gleich drehenden Motoren kein Moment um die Hochachse (Z/Gier-Achse, hier: aus dem Bild heraus) zu haben müssen jeweils zwei Rotoren gegeneinander laufen. Deshalb muss man zwei rechtslaufende und zwei linkslaufende Luftschrauben einsetzt.
Wenn nun die linksdrehenden Luftschrauben schneller drehen als die rechtsdrehenden Luftschrauben, entsteht ein Moment um die Hochachse und der Quadrocopter dreht sich. Will man nach vorne fliegen, müssen die hinteren Luftschrauben schneller drehen, damit der Quadrocopter nach vorne kippt. Das gleiche gilt für das Fliegen zur Seite. Um hoch zu fliegen müssen dann alle Luftschrauben gleichermaßen schneller drehen.
Alle veralteten Bauweisen sind im folgenden Text hellblau markiert, sie sollten unter KEINEN Umständen für den Bau eines neuen Multicopters benutzt werden.
Das Herz eines jeden Copters ist ein Microcontroller. In älteren Bauanleitungen wird oft ein gewöhnliches Arduino Pro Mini verwendet, das in eine Lochrasterplatine gesteckt wird. Dieses ist aus heutiger Sicht nahezu antik, heutzutage werden eigene (Flug-) Steuerboards benutzt (engl. Flight Controller, kurz FC), die bereits den Microcontroller, Stützkondensatoren usw. auf dem Board verlötet.
Der Vorteil liegt darin, dass keine externe Beschaltung mehr nötig ist. Es müssen nur noch die Pin-Leisten angelötet werden, an denen schließlich die ESCs, Sensor und Empfänger angeschlossen wird. Dies bietet vor allem für Anfänger enorme Vorteile, da weniger gelötet und Fehler beim Anschließen minimiert werden. Ein weiterer massiver Vorteil sind die bereits auf dem Board verbauten Spannungsregler, mehr siehe Spannungsversorgung.
Sämtliche für MultiWii Copter benutzte Microcontroller werden von Atmel gefertigt und mit der Arduino-Software programmiert. Die MultiWii-Software ist eine Open-Source Software, mehr dazu bei der Programmierung.
Spannungsversorgung
Der Microcontroller bzw. der Flight Controller arbeiten mit 5V, auch die meisten der Sensoren arbeiten mit 5V, manche jedoch auch mit 3,3V.
Die meisten der fertig zu kaufenden FCs verfügen sowohl über einen 5V Spannungsregler-IC (ein Spannungsregler begrenzt den max. fließenden Strom und gleicht Batterieschwankungen aus, auch BEC genannt, für Battery Eliminator Circuit), als auch über einen 3,3V Spannungsregler-IC, um die benötigten Spannungen erzeugen zu können (nicht zu verwechseln mit UBEC) .Es gibt meist einen Pin, an dem die 3,3V abgegriffen werden können.
Unterschied BEC – UBEC:
Das BEC (auch lineares BEC) wandelt den Spannungsüberschuss (Differenz zwischen der Eingangs (=Akku) und der Ausgangsspannung) in Abwärme um --> bei hoher Differenz wird das Teil ordentlich heiß.
Das UBEC (auch Switching BEC) ist ein getaktetes BEC, dass die Spannung nicht dauerhaft durchlässt sondern nur in gewissen Abständen --> es hat eine erheblich kleine Abwärme / einen höheren Wirkungsgrad als das lineare BEC.
Das FC-Board kann über verschiedene Wege mit Spannung versorgt werden:
1) Über den LiPo-Akku.
Der Flight Controller wird mit dem Plus und dem Minus-Pol des Akkus verbunden und die auf dem Board verlöteten Spannungsregler wandeln die Spannung zu den benötigten 5V. Je nach Board können 2 und 3 Zellen-Akkus oder 3 und 4 Zellen-Akkus angeschlossen werden. Vor dem Anschließen AUF JEDEN FALL im Datenblatt des FCs nachsehen, wie der Akku richtig angeschossen wird. Bei falschem Anschluss kann es passieren, dass der Spannungsregler beschädigt wird. Aus diesem Grund wird diese Variante nach Möglichkeit vermieden und der FC durch das BEC des Reglers versorgt, siehe 2).
2) Über BEC eines ESCs
Einfach gesagt: Ein ESC (Electronic Speed Controller) leitet die Energie des Akkus kontrolliert an den Motor. Dazu ist ein Microcontroller nötig, der die Signale es FCs verarbeitet. Auch dieser Microcontroller benötigt 5V, deshalb wandelt der ESC einen Teil der Akkuspannung auf 5V. Diese liegen auch am Plus-Pin des Steckers an.
Bei der Versorgung über das BEC wird das Board über die Spannung an diesem Pin versorgt. Aufgrund der Leichtheit der Versorgung (ESC muss ja sowieso angesteckt werden) und der Sicherheit gegen Falsch-Anschließens (wenn ein Fehler passiert, wird nur der ESC um 10$ defekt und nicht der wesentlich teurere FC) ist dies die einfachste und meist verwendete Methode.
3) Über ein externes BEC
Die meisten FCs verfügen auch über Pins, die direkt an 5V angeschlossen werden können. Wenn es erwünscht wird kann ein externes BEC am Akku angeschlossen werden, die 5V auf die oben genannten Pins angelegt werden. Dies wird nur in Betrcht gezogen, wenn der interne Spannungsregler defekt ist und/oder der ESC kein BEC hat.
Sensorik
Um einen MultiWii-Coter in die Luft zu bekommen ist zumindest ein Sensor nötig, der Lagesensor. Es gibt jedoch viele weitere Sensoren, die neue Funktionen ermöglichen. Diese Sensoren sind ein Beschleunigungssensor, ein Barometer, ein Magnetometer, ein GPS Modul und ein Sonar.
Noch ein Begriff vorneweg: Da die Sensoren nur kleine Chips sind, die man nur schwerlich irgendwo festlöten kann, werden die Sensoren bereits auf Boards gelötet verkauft (auf dem Board befinden sich auch externe Pull-Ups und Kondensatoren). Diese Boards nennt man Break-Out-Boards, kurz BOB.
Lagesensor
Die Grundlage eines jeden Copters ist das Gyroskop (kurz GYRO, auch Lagesensor genannt). Um ein flugtaugliches Modell zu bauen, wird mindestens ein Gyro und ein Microcontroller benötigt.
Ein Gyroskop ist ein Drehratensensor. Er arbeitet ähnlich einem Kreiselkompass. Das Ausgangssignal ist proportional zur Winkelgeschwindigkeit (°/s). Das Gyro überprüft, ob es zu einer Abweichung der Achsen zu den tatsächlichen Werten gibt und gibt diese Abweichungen an die Steuerung (den FC) weiter. Bei bekannter Geschwindigkeit lässt sich somit der Winkel, um den sich das Objekt gedreht hat, bestimmen.
Wer die Funktionsweise genauer wissen will, kann sich dieses Video anschauen. Für den Modellbau ist das Video ab Minute 3:20 interessant:
http://www.youtube.com/watch?v=cquvA_IpEsA
Während ein Gyroskop früher aus einem Kreiselsystem aufgebaut war, ist es heute möglich, ein gesamtes 3-Achsen Gyro (X,Y,Z) auf einen Chip mit der Größe von wenigen Millimetern zu schrumpfen. Ausschalggebend ist die von InvenSense entwickelte MEMS-Technik (Microelectromechanical System). InvenSense produziert auch die aktuell besten Lage und Beschleunigungssensoren (siehe mehr unten).
Beschleunigungssensor
Ein Beschleunigungssensor (engl. acceleration sensor, kurz ACC) ist ein Sensor, der die Beschleunigung misst, indem die auf eine Testmasse wirkende Trägheitskraft bestimmt wird. Somit kann z. B. bestimmt werden, ob eine Geschwindigkeitszunahme oder -abnahme stattfindet. Mithilfe des Beschleunigungssensors kann sich der Copter jederzeit wieder in eine waagrechte Lage bringen.
Unterschied zwischen Gyro und ACC
Ein Beschleunigungssensor misst die translatorische Beschleunigung in der Richtung, für die er gebaut ist. Ein Gyro misst die rotatorische Geschwindigkeit Dreh/Winkelgeschwindigkeit) um die Achse, für die es gebaut ist.
Es werden zwei unterschiedliche Dinge gemessen: das ACC misst die Zu/Abnahme einer (ideal: Linearen) Längsbewegung und das Gyro die Änderung einer Drehbewegung.
Barometer
Ein Barometer (kurz Baro, Luftdrucksensor, engl. Altimeter) ist ein Messgerät zur Bestimmung des statischen Absolut-Luftdrucks. Im Falle von Multicoptern wird es indirekt zur Höhenmessung eingesetzt. Durch die Änderung des Luftdrucks kann errechnet werden, um wie viele Meter der Copter gestiegen/gefallen ist. Eine spezielle Form des Baros ist das Mikrobaro, das bereits minimale Druckunterschiede messen kann und die Höhe auf Zentimeter genau bestimmen kann.
Magnetometer
Das Magnetometer (kurz: MAG, engl. Magnetometer) ist ein Sensor zum Bestimmen der Himmelsrichtung. Das MAG funktioniert in Prinzip wie ein elektronischer Kompass. Es erkennt das Erdmagnetfeld und teilt der Steuerung die Abweichung zum Norden mit.
GPS
Das Global Positioning System (kurz: GPS) ist ein globales Navigationssatellitensystem zur Positionsbestimmung. GPS hat sich als das weltweit wichtigste Ortungsverfahren etabliert und wird in Navigationssystemen weitverbreitet genutzt. Mit einem GPS Modul ausgestattet kann ein Copter unter anderem an einer Position schweben bleiben und auch bei Wind nicht abdriften Position Hold, kurz: PH) oder auf Knopfdruck zum Startpunkt zurückfliegen (Return to Home, kurz: RTH)
Des Weiteren gibt es noch einen Sonarsensor, der mittels Ultraschall-Messung die Entfernung zu einem Objekt bestimmt. Das Sonar wird bei MultiWii-Coptern an der Unterseite montiert und soll eine selbstständige Landung des Copters ermöglichen (wenn es wahr ist. Das Sonar wird noch nicht häufig eingesetzt und da ich es selbst noch nie benutzt habe, will ich keine Unwahrheiten verbreiten)
Erklärung 6DOF, 10DOF IMU
Bei den nachfolgenden Sensoren gibt es viele kombinierte Sensorboards, die unter anderem die Bezeichnungen 6DOF oder 10DOF tragen. Dabei steht DOF für Degrees of Freedom (auf Deutsch: sechs Freiheitsgrade). Ein Freiheitsgrad ist sozusagen eine gemessene Achse. Bei 6 Freiheitsgraden heißt dass, das es 6 verschiedene Achsen gibt. Im Falle einr 6DOF sind das X,Y und Z Achse das Gyros und X, Y und Z Achse des ACCs. Bei der 10DOF kommen noch die X, Y und Z Achse des MAG und die Höhe des Baros dazu.
Das heißt, eine 6DOF besteht zumeist aus Gyro+ACC, eine 10DOF aus Gyro+ACC+Baro+MAG.
Erkläung IMU: Die kombinierten Sensorboards werden oft als IMUs bezeichnet. IMU steht für Inertial Measuring Unit, was sowie wie interne Messeinheit bedeutet. Als IMU wird alles bezeichnet, dass aus zumindest einem Gyro und einem ACC besteht.
Es folgt eine Liste mit den jeweiligen Sensoren, dabei werden veraltete Sensoren Blau geschrieben, die Schwarz geschriebenen sind auf dem aktuellen Stand der Technik und werden für einen Copter empfohlen.
Lagesensoren:
Wii Motion Plus (kurz: WMP): Der Anfang der MultiWii Copter und der Namengeber dieser Copter-Bauart. Er wird von InvenSense produziert und ist einer der ersten Lagesensoren, der mit der MEMS-Technik erzeugt wird. Ihrerzeit waren diese Sensoren aus einem Wii Motion Plus-Controller auszubauen und bildeten die Grundlage für jeden Copter. Dieser Sensor unterstützt nur eine I²C Taktfrequenz von 100kHz. Heute sind diese Sensoren komplett veraltet und nicht weiter zu empfehlen, da moderne Sensoren eine vielfach höhere Genauigkeit aufweisen.
ITG3200: ist ein von InvenSense produzierter 3-achsiger Lagesensor, jedoch mittlerweile auch nicht mehr aktuell, jedoch besser als das Original WMP. Dieser Sensor unterstützt bereits eine I²C Taktrate von 400kHz, ebenso wie alle weiteren Sensoren.
L3GD20: von der Genauigkeit ungefär wie das ITG3200, auch schon abgelöst
Weitere Gyros weiter unten bei „Kombinierte Sensoren“
Beschleunigungssensoren:
Wii Nunchuk: das Nunchuk wird ebenfalls aus dem Controller ausgebaut. Dies war die erste Möglichkeit, einen 3 achsigen Beschleunigungssensor in einen Copter einzubauen. Dieser Sensor wurde recht bald durch das BMA020 ersetzt, und sollte heute ohnehin nicht mehr eingesetzt werden.
BMA020: ist der erste Beschleunigungssensor, der speziell für den Einsatz im Modellbau gekauft werden kann. Das Bosch BMA020 wird bereits auf einem BOB ausgeliefert und muss nur noch über den I²C Bus mit dem FC verbunden werden. Auch dieser Sensor sollte nicht weiter verwendet werden.
BMA180: ist der Nachfolger des BMA020, jedoch auch schon veraltet.
Weitere ACCs weiter unten bei „Kombinierte Sensoren“
Barometer:
BMP085: war der erste zum Einsatz kommende Luftdrucksensor. Da es bisher nur 2 Baros gibt, ist er (leider) immer noch oft die erste Wahl, jedoch gibt es einen wesentlich präzieseres Baro, siehe unten. Der Job des Baros ist es, die Höhe zu halten. Da ist eine möglichst hohe Genauigkeit von Vorteil, da der Copter sonst bis zu einem Meter auf und ab schwankt
MS5611: Bei dem MS5611 handelt es sich um den leistungsstärksten Lusftdrucksensor. Er schaft eine Auflösung von bis zu 0,012 mbar, was umgerechnet ca. 10 Zentimetern entspricht. Weiters zeichnet er sich durch einen sehr kleinen Stromverbrauch und einer niedrigen Toleranz aus. Der MS5611 ist der aktuell beste Luftdrucksensor, der dem BP085 unter allen Umständen vorzuziehen ist.
Magnetometer:
HMC5843: war das erste Magnetometer im MultiWii Bereich. Es wird von Honeywell gefertigt und ist mittlerweile durch das HMC5883 ersetzt worden. Es verfügt über eine Auflösung von 7 Milligauss.
HMC5883: ist der Nachfolger des HMC5843. Es verfügt über eine Auflösung von 5 Milligauss und ist somit das genaueste Magnetometer für MultiWii.
Weitere Magentometer weiter unten bei „Kombinierte Sensoren“
GPS
Die meisten der im Handel erhältlichen GPS Module funktionieren einwandfrei mit der MultiWii Software. Da das GPS erst seit kurzem im Copterbau eingesetzt wird, gibt es noch nicht wirklich stark überarbeitete Module, die alle anderen in den Schatten stellen. Man findet mit den meisten GPS Modulen auf Anhieb 5-8 Satelliten, was ohnehin das Maximum an Satelliten darstellt.
Kombinierte Sensoren (in einem Chip):
LSM303DLM: vereint einen Beschleunigungssensor und ein Magnetometer in einem Chip. Die Kombination von ACC und Mag ist sinnvoll wenn man ein 3 Achsen Magnetometer ausliest, und nacher wissen will wo die Himmelsrichtungen sind. Ohne die Lage im Raum (ACC) ist das nämlich nicht möglich. Als Handycompasschip/GPS-Kcompasschip ist der LSM303DLM vollkommen ok, da keinb Gyro erforderlich ist. Das spart Platz, Strom und Geld. Für Multicopter wird zusätzlich noch ein Gyro benötigt, deshalb wird es oft in Verbindung mit dem ITG3200 verkauft. Wie dem sei, das LSM303DLM gehört nicht mehr zu den idealsten Lösungen, eine MPU6050 und ein HMC6883 ergeben eine bessere Kombination.
MPU6050: ist DER meistbenutzte Sensor im aktuellen Copterbau (Stand:März 2013). Die MPU6050 wird von InvenSense gefertigt und vereint ein hochpräzises Gyro und einen hochpräzisen Beschleunigungssensor in einem Gehäuse. Durch diese Bauweise und weil die internen Sensoren die genauesten sind, empfehle ich für jeden Neubau diesen Sensor als Gyro+ACC. Keiner der oben genannten Sensoren erreicht annähernd die Genauigkeit der MPU6050.
Die MPU6050 liefert beste Flugerlebnisse in Kombination mit einem HMC5883 MAG und einem MS5611 Baro (alle 3 Sensoren auf einem BOB: http://www.drotek.fr/shop/en/62-imu-10dof-mpu6050-hmc5883-ms5611.html).
MPU9150: Dieser Sensor ist in der aktuellen MultiWii-Software (V2.2) noch nicht integriert, jedoch wird er das mit Sicherheit bei der neuen Version sein. Ich schreibe den Sensor denoch dazu, da ich denke, dass er die Zukunft ist. Die MPU9150 ist der erste 9-Achsen Sensor der Welt und vereint Gyro, ACC und MAG in einem Chip.
Es werden hier nicht sämtliche Boards von kombinierten Sensoren aufgezählt, da die Sensoren in Prinzip auf der Platine an den I²C Bus angeschlossen sind und an da nicht allzu viel falsch machen kann. Es sollte darauf geachtet werden, dass die modernsten Sensoren verbaut sind, die fertigen Boards sollten eigentlich alle problemlos funktionieren, egal wo man sie kauft.
Zusammenfassend kann man sagen, die beste Kombination/die modernsten Sensoren ihrer Klasse sind:
Gyro: MPU6050, MPU9150
ACC: MPU6050, MPU9150
Baro: MS5611
MAG: HMC5883, MPU9150
GPS: die meisten GPS-Module sind für die MultiWii-Funktionen gut geeignet
Flugcontroller
Der Flugcontroller (kurz: FC) ist das Herz eines jeden Multicopters. Er besteht aus einem Atmel Microcontroller (kurz: µC) und der nötigen Außenbeschaltung sowie den Anschlusspins für Empfänger, Regler und Sensoren. Es bekommt vom Empfänger die Steuersignale und muss diese mit den Sensorwerten verknüpfen und über die Regler auf die Motoren übertragen.
Es gibt viele verschiedene Microcontroller, die im MultiWii-Bereich eingesetzt werden. Prinzipiell kann jeder µC verwendet werden, jedoch kann ich aus heutiger Sicht nur zu zwei µC raten, die 11 Bit PWM unterstützen und somit SimonK ESCs ansteuern können (mehr siehe unten bei ESCs). Diese beiden wären einerseits der große Atmel ATmega 2560 und der kleinere Atmel ATmega32u4. Es gibt auch FCs, die bereits sämtliche Sensoren (meist Gyro, ACC, MAG und Baro) fix auf der Steuerplatine verlötet haben. Die Tendenz zu diesen sogenannten AIO (All In One) FCs ist stark ansteigend.
ATmega 2560: dieser Microcontroller ist groß genug für sämtliche möglichen Konfigurationen. Ursprünglich ist der ATmega auf dem Arduino MEGA verbaut, das heißt es wird in Arduino auch als Arduino MEGA definiert, mehr siehe Software. Er verfügt über genügend In und Outputs, um jeden Copter inclusive Kamera Gimbal ansteuern zu können. Es werden also Copter bis zu einem Octocopter mit Kamera Gimbal unterstützt. Es gibt 14 Pins mit 11 Bit, daher eine ideale Kombination mit geflashten SimonK Reglern. Zur Kommunikation mit anderen Bauteilen oder dem PC stehen ein USB-Anschluss, ein SPI Bus, ein I²C Bus und 4 UART Schnittstellen.
Ein FC basierend auf diesem Prozessor ist ideal für einen große Copter mit Kamera-Gimbal.
ATmega32u4: ist ein kleinerer Prozessor, der über 6 hochauflösende PWM Ausgänge verfügt. Dieser Prozessor ist auch auf dem Arduino Leonardo verbaut --> Leonardo Bootloader. Es können auch Octocopter unterstützt werden, dann gibt es jedoch keine weiteren Ausgänge für eine Kamera oder ähnliches. Es werden nur Hexacopter mit Kamera-Gimbal unterstützt. Bei Boards mit diesem Prozessor kann es zu Platzproblemen mit der Sketch-Größe kommen. Es wird die MultiWii-Software 2.1 ohne GPS noch voll unterstützt, mit GPS oder Version 2.2 ist der Sketch für den Flash Speicher zu groß. Um dieses Problem zu beheben, muss ein kleinerer Bootloader auf das Board geladen werden, um Platz für den Sketch zu ermöglichen. Mehr dazu siehe: http://fpv-community.de/showthread.php?23494-Sketch-Size-amp-32u4
Zur Kommunikation mit anderen Bauteilen oder dem PC stehen ein Mini-B USB-Anschluss und ein I²C Bus zur Verfügung.
ATmega328p: ist der früher am häufigsten eingesetzte (und leider heute immer noch oft gekaufte) µC (z.B. am ProMini). Er wird auch heute noch auf vielen FCs eingebaut. Der ATmega328p verfügt nur über 6 Hardware-PWM Ausgänge mit 8 Bit Auflösung, es können zwei weitere Ausgänge mit Software-PWM belegt werden, was eine Steuerung eines Octocopters zulässt. Aufgrund der 8-Bit PWM macht der Einsatz von SimonK geflashten Reglern keinen Sinn, da diese bei 8 Bit genauso funktionieren wie jeder herkömmliche China-Regler (der Unterschie ist, dass SimonK Regler auch 11 Bit PWM unterstützen).
Es werden hier verschiedene Flight Controller aufgezählt, die aus heutiger Sicht (23.03.2013) am besten für den Copterbau geeignet sind.
Flyduino MEGA: ist ein hochwertiger FC, basierend auf dem ATmega 2560. Dieser FC ist ideal für einen Kamera-Octocopter/Hexacopter. Es werden sämtliche Empfängertypen unterstürtzt (Spectrum Satellite, Summensignal). Prinzipiell kann dieser FC alles, was die Software hergibt. Es sind jedoch keine Sensoren auf dem Board integriert, diese müssen über den I²C Bus angeschlossen werden. Zum Programmieren wird ein FDTI Adapter benötigt, der an den dafür vorgesehenen Anschlüsse angesteckt werden muss (Details siehe FDTI). Das Flyduino MEGA ist bei flyduino.net erhältllich.
Crius AIO V2.0: basiert ebenfalls auf dem ATmega 2560 und ist, wie es der Name schon sagt, ein All In One Board. Es verfügt über dieselben Möglichkeiten wie das Flyduino MEGA (Octo+Kamera). Es ist ein MPU6050 Gyro+ACC, ein HMC5883L Magnetometer und ein MS5611 Barometer auf dem Board verlötet, da dass man keine externen Sensoren verlöten muss. Dies ist vor allem für Anfänger ein großer Vorteil. Das Cruis verfügt über einen Micro-USB Anschluss und einen on-board FDTI Converter (kein externer FDTI erforderlich). Das Crius AIO V2.0 ist bei rctimer.com erhältlich.
Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0: ist die Hobbyking Kopie vom Crius AIO V2.0, es verfügt über dieselben technischen Daten/Sensoren. Erhältlich bei hobbyking.com.
MultiWii PRO Flight Controller w/MTK GPS Module: ebenfalls auf dem ATmega2560 basierend und von den Möglichkeiten gleich dem Crius. Viele Leute fliegen mit diesem Board, jedoch sind sowohl Gyro als auch ACC nicht mehr dem aktuellen Standard entsprechend. Es wird ein GPS Modul mitgeliefert, was insgesamt immer noch zu einem guten Preis/Leistungsverhältnis führt (wenn man diesen FC kauft, kann man anstatt des ITG3200 Gyros+BMA180ACC eine externe MPU6050 an den I²C Bus hängen, dann ist das Ganze auch top ausgestattet incl. GPS). Dennoch bringt es ein Crius o.ä. mit GPS Modul mehr (meiner Meinung nach).
Erhältlich bei hobbyking.com
Flyduino NanoWii: es ist trotz seiner geringen Größe eine vollwertige Multicoptersteuerung auf Basis des ATmega32u4. Es verfügt über 6 hochauflösende PWM Ausgänge, kann jedoch auch einen Octocopter ansteuerun ACHTUNG: die 11 Bit PWM steht nur auf den Motorausgängen 1-6 zur Verfügung, bei einem Octo ist 11 Bit PWM daher NICHT möglich. Es hat einen on-board Mini-B USB Anschluss (also kein externer FDTI Adapter notwendig). Wie oben erwähnt, kann es bei diesem Board zu Speicherplatzproblemen kommen.
Bereits auf dem Board integriert ist ein MPU6050 Gyro+ACC, ein Baro/MAG/GPS kann über den I²C Bus angeschlossen werden.
Das NanoWii eignet sich gut für Anfänger und kleine Copter, da es bereits Gyro+ACC on-board hat und nur noch die ESCs+Empfänger angeschlossen werden müssen. Für die Programmierung müssen teilweise die Treiber heruntergeladen werden, ansonsten ist das NanoWii Plug & Play.
Das NanoWii ist bei Flyduino.net erhältlich.
MultiWii NanoWii ATmega32U4 Micro Flight Controller USB/GYRO/ACC: Die Kopie des NanoWii von HK. Selbe Daten, alles gleich. Erhältlich bei hobbyking.com
Flyduino MW32: verfügt als so ziemlich erstes Board über eine 32 Bit CPU (alle anderen Boards haben eine 8 Bit CPU). Das Board schafft ähnlich dem NanoWii einen Hexacopter anzusteuern. Ich weiß nicht, ob der µC 11 Bit PWM schafft, daher kann nicht gesagt werden, ob SimonK Regler angesteuert werden können. Das MW32 verfügt über ein MPU6050 Gyro+ACC, ein MS5611 Baro und ein HMC5883 Magnetometer sowie über einen on-board Mini-B USB Anschluss.
Da es recht kompliziert in Betrieb zu nehmen ist, sollten Anfänger das NanoWii oder einen anderen FC wählen. Das MW32 ist ebenfalls bei Flyduino.net erhältlich.
DroFly MultiWii FC: ist ein auf dem ATmega32u4 basierender FC von DroTek. Er hat die selben Spezifikationen wie das NanoWii (11 Bit PWM für Motor 1-6, Mini-B USB, ….), verfügt jedoch im Gegensatz zum NanoWii über eine 10DOF IMU, das heißt, es ist ein MPU6050 Gyro+ACC, ein MS5611 Baro und ein HMC5883 Magnetometer auf dem Board verlötet.
Gut geeignet für Anfänger, die gerne sämtliche Sensoren benützen möchten, erhältlich bei DroTek.fr
MultiWii MicroWii ATmega32U4 Flight Controller USB/BARO/ACC/MAG: ist ein auf dem ATmega32u4 basierener FC von Hobbyking. ER ist nahezu baugleich mit dem DroFly MultiWii FC, selben Sensoren, Steuermöglichkeiten usw. .
Sollte jemand ohnehin bei HK bestellen, sollte er diesen FC nehmen, da man sich dadurch das Bestellen bei DroTek erspart. Qualitativ und leistungsmäßig dürften beide Boards gleichwertig sein.
Erhältlich bei hobbyking.com
Manche der FCs unterstützen eine direkte LiPo-Überwachung (ohne einem extra anzuschließenden Buzzer). Nähe Details, Anschlussbelegung und Schaltplan siehe Sonstiges, Tips+Tricks.
Kommunikation mit dem PC:
Um den FC programmieren zu können, muss eine Schnittstelle zum PC vorhanden sein. Um über den USB Anschluss gesendete Daten für den Microcontroller verwertbar zu machen ist ein USB to UART (oder FDTI Adapter) nötig. Dieser wandelt die Befehle vom PC für den Microcontroller um. Es müssen nur die Treiber installiert werden, dann kann einfach der FC mit einem Kabel mit dem PC verbunden werden. Die Treiber können hier heruntergeladen werden: http://www.ftdichip.com/FTDrivers.htm. Dies ist jetzt nicht alzu wichtig, wird bei der Programmierung nochmal erklärt. Es ist nur daran zu denken, einen FTDI Adapter zu kaufen, wenn das Board einen erfordert.
Händler:
Die verschiedenen Sensoren sind mittlerweile fast überall zu bekommen. Da die Sensoren vermehrt direkt auf der Flight Controller Platine verlötet werden sind einzelne Sensorboards meist nur noch als Zusatz für On-Board Sensoren zu kaufen.
Die hier aufgeführten Händler sind die verlässlichsten/bekanntesten Händler, in Wirklichkeit gibt es noch wesentlich mehr.
http://www.drotek.fr/shop/en/
DroTek ist ein europäischer Händler mit Sitz in Frankreich. Er wurde durch seine günstigen Preise (in China gibt es die Sensoren noch billiger, jedoch mit Versand und Zoll kommts aufs selbe) und die hervorragende Qualität der Produkt bekannt. Mittlerweile erhält man neben Sensoren auch noch FC, Spannungsregler, ESCs und vieles mehr.
http://flyduino.net/
Ist der vermutlich bekannteste Online-Händler mit Sitz in Deutschland. Neben Sensoren bietet Flyduino sämtliche Bauteile für Multicopter an. Auch Flyduino steht für höchste Qualität und guten Service.
http://www.stefansliposhop.de/liposhop/
SLS vertreibt alles zum Thema Akkus. SLS-Akkus sind so ziemlich die besten Akkus die es gibt. Sie sind hochqualitativ und haben genau die technischen Daten, die angeben sind (bei den China-Akkus, auch von HK, ist das so eine Sache, z.B.: da steht 30C drauf, bei Tests liefert der Akku max. 20C, Für den Anfang sind China-Akkus mehr als ausreichend, wer aber wirklich professionelle Geräte bauen will, setzt besser auf SLS-Akkus). Preislich liegt SLS nur knapp über den China-Preisen, qualitativ aber meilenweit voraus: die Akkus kommen säuberlich verpackt und perfekt balanciert an, mit diesen Akkus gibt es keine Probleme.
Anmerkung: SLS-Akkus werden ohne Anschlussstecker geliefert, des weiteren befinden sich an den Akkus andere Balancerstecker und zwar JST-XH anstatt der üblichen EHR-Stecker, man braucht also noch einen Adapter von JST-XH auf EHR.
http://www.rctimer.com/
http://www.hobbyking.com/hobbyking/store/index.asp
Hobbyking und RC Timer sind vermutlich die bekanntesten asiatischen Händler. Sie stehen für konkurrenzlos niedrige Preise jedoch auch schwankende Qualität. Jedoch gibt es sämtliche Teile für den Modellbau und vieles mehr zu kleinsten Preisen. TIPP: Kundenrezessionen lesen, dann weiß man eh, wovon man die Finger lassen sollte.
Motoren oder ESCs lassen sich ohne weitere Probleme bestellen, jedoch muss man bei den LiPo-Akkus aufpassen, manchmal spielt der Zoll nicht mit und man darf dann bei der nächsten Zollstelle antanzen und nett fragen, ob man seine Akkus bekommt. Die Abhilfe bietet das deutsche Warenhaus von Hobbyking.
Mittlerweile erhält man die Sensoren/FCs auch bei eBay oder Amazon, jedoch würde ich gerade Anfängern raten, die Bauteile bei so wenig wie Händlern wie möglich zu bestellen.
Bus-Systeme
Die Sensoren können mit einem Bus-System (Ein Bus ist ein Leitungssystem mit zugehörigen Steuerungskomponenten, das zum Austausch von Daten und/oder Energie zwischen Hardware-Komponenten dient.) mit dem Flight Controller kommunizieren. Es werden prinzipiell zwei Bus-Systeme im Modellbau eingesetzt:
Serial Peripheral Interface (kurz SPI)
SPI ist ein synchroner serieller Datenbus, mit dem digitale Schaltungen nach dem Master-Slave-Prinzip miteinander verbunden werden können.
• Drei gemeinsame Leitungen, an denen jeder Teilnehmer angeschlossen ist:
SDO (Serial Data Out) bzw. MISO oder SOMI (Master in, Slave out)
Wird benutzt, wenn der Master Daten vom Slave empfangen soll. Zum Beispiel wenn der Lagesensor (wird als Slave betrieben) die aktuellen Positionswerte an den FC (ist der Master) übermittelt.
SDI (Serial Data In) bzw. MOSI oder SIMO (Master out, Slave in)
Wird benutzt, wenn der Slave Daten vom Master empfangen soll
SCK (Serial Clock) bzw. SCLK, wird vom Master ausgegeben
Gibt den Takt vor. Bei jedem Takt kann ein Bit übertragen werden (das Bit wird auf die Datenleitung MISO/MOSI angelegt und mit der steigenden Taktflanke vom anderen Teilnehmer übernommen).
• Eine oder mehrere mit logisch-0 aktive Chip-Select-Leitungen, welche alle vom Master gesteuert werden und von denen je eine Leitung pro Slave vorgesehen ist.
• Will der Master mit einem Bus-Teilnehmer kommunizieren, zieht er die entsprechende Leitung auf 0. Damit weiß der Teilnehmer, dass er angesprochen wird.
Diese Leitung ist auch der große Nachteil von SPI, da für jeden Teilnehmer eine eigene Leitung benötigt wird (bei 500 Geräten macht das 500 extra Leitungen!!) Dieses Problem behebt der IC Bus, siehe unten.
I²C
Der I2C-Bus (I2C = IIC = Inter-Integrated-Circuit) wurde von der Firma Philips für die Kommunikation zwischen einzelnen Schaltkreisen innerhalb eines Gerätes entwickelt.
Beim I2C-Bus handelt es sich um eine synchrone serielle 2-Drahtverbindung zwischen einem Master und einer beliebigen Anzahl Slaves. Auf der einen Leitung (SCL) wird der Takt übertragen, die andere Leitung (SDA) dient der Übertragung der Daten. Die Daten können vom Controller zum Slave laufen (schreiben), oder aber auch vom Slave zum Master (lesen). Der Takt wird dabei aber immer vom Master erzeugt.
I²C ist als Master-Slave-Bus konzipiert. Ein Datentransfer wird immer durch einen Master initiiert; der über eine Adresse angesprochene Slave reagiert darauf. Dazu zieht der Master die SCL Leitung auf Low und schickt dann die Adresse des gewünschten Bauteils auf die SDA Leitung. Außerdem wird dem Slave mitgeteilt, ob geschrieben oder gelesen werden soll.
Der Vorteil des I²C-Busses ist, dass an nur 2 Leitungen nahezu unberenzt viele Geräte angehängt werden können.
Im MultiWii-Bereich kommt fast ausschließlich dieser Bus zum Einsatz. Die Sensoren werden einfach parallel an dem Bus angeschlossen, siehe unten. Es gibt 2 standardisierte Taktraten: 100kHz und 400kHz. Wer nicht mit dem originalen WiiMotionPlus (kurz: WMP) fliegt, sollte 400kHz einstellen, mehr siehe Programmierung.
Da wie oben erklärt sowohl 3,3V als auch 5V als Versorgungsspannungen im Modellbau vorkommen, kann es passieren, dass der FC mit 5V läuft und der Sensor mit 3,3V. Um denoch miteinander kommunizieren zu können, müssen die Signalpegel vereinheitlicht werden. Dies geschieht durch:
• Interne Pullups: Sind sie aktiviert, liegen auf der Datenleitung 5V, was für die meisten Sensoren schon eine zu hohe Spannung ist.
• Externe Pullups: Gibt es keine internen Pull Ups, werden am Board externe Widerstände verlötet. Dadurch liegen auf der Datenleitung 3,3V an, was für die Sensoren eine verträgliche Spannung und den Microcontroller noch ein ausreichend starkes Signal ist.
• Logic Level Converter: Ein LLC ist die sicherste aber von der Schaltung her aufwändigste Möglichkeit. Dieser wandelt den Spannungspegel von 5V auf für Sensoren verträgliche 3,3V um.
ESC, SimonK Firmware
Motorregler oder ESC (engl. Electronic Speed Controller), werden benötigt, um die Energie des Akkus dosiert an den Motor zu leiten. Dies geschieht typischerweise durch Pulsweitenmodulation, d.h. der Akku wird in einem festen Takt (20 bis 100kHz) auf den Motor geschaltet. Bei Vollgas ist der Schalter während des gesamten Zyklus eingeschaltet, bei Halbgas 50% der Zykluszeit. In jedem Fall legt der Regler die volle Eingangsspannung an den Motor an. Für die Kaufentscheidung des Reglers ist unter anderem seine maximale Belastbarkeit in Ampere (A) wichtig. Diese Belastbarkeit sollte im normalen Betrieb des Modells nicht überschritten werden (mehr siehe Bauteildimensionierung). Die für Multicopter benötigten Brushless Regler (BL-Regler) erzeugen des Weiteren einen dreipahsigen Drehstrom, um die Brushless Motoren steuern zu können. Sie haben 2 Akkukabel, 3 Motorkabel und einen Stecker, der an den FC angesteckt wird. Die meisten der Serien-ESCs können mit einer Programmierkarte programmiert werden. Es können z.B. das Anlaufverhalten des Motors geändert oder der standardmäßig (leider) eingeschaltete Unterspannungsschutz deaktiviert werden. WICHTIG: den Unterspannungsschutz IMMER DEAKTIVIEREN. Die Funktion des Unterspannungsschutzes ist die, dass bei niedriger Akkuspannung der ESC aufhört, Strom an den Motor zu leiten, damit der Akku nicht tiefentladen und damit kaputt wird. Dies ist jedoch komplett hirnrissig, da so der gesamte Multicopter aus mehreren hundert Metern Höhe abstürzt. Es ist der gesamte Rahmen (=Frame), die Motoren und was weiß ich nicht noch alles kaputt, aber Hauptsache der Akku ist nicht tiefentladen. Eine nette Funktion für Segelflieger, für Multicopter aber tötlich. Um dennoch bei fast leerem Akku gewarnt zu werden, wird ein LiPo Warner empfohlen. Dieser hat entweder superhelle LEDs oder einen Buzzer (im Idealfall beides). Er wird an den Balancer-Anschluss des Akkus angeschlossen und beginnt zu blinken / piepen, sobald die Zellspannung des Akkus unter einen gewissen Wert fällt. Sehr zu empfehlen ist hier der LiPo-Warner von Flyduino, der extrem laut piept, sodass alle im Umkreis von 10km wissen, dass der Akku leer ist. Dies ist wichtig, damit man es auch bemerkt, wenn der Copter etwas weiter entfernt ist. Link: http://flyduino.net/1S-8S-Dual-Speaker-Lipo-Alarm-8S-Voltage-Tester-Lipo-Checker
Aufbau eines ESCs:

Es gibt die Möglichkeit, den ESC zu flashen und eine andere Firmware draufzuspielen. Da die meisten ESCs aus Asien usw. meist vollkommen Multicoper untauglich sind, wird das FLashen in letzter Zeit immer populärer. Die modifizierte Software heißt SimonK und ist gratis im Internet herunterladbar. Die Vorteile eines geflashten ESCs sind folgende:
• Ein SimonK-ESC verarbeitet das 490kHz-PWM-Signal von der Flugsteuerung locker, was ein normaler „Serien-ESC“ nicht schafft (die schaffen das nicht und steigen irgendwann aus).
• Die meisten der „Serien-ESCs“ steuern den Motor mit 8kHz an, der geflashte ESC hingegen mit 18kHz. Dadurch entfällt das nervige Sirren/Pfeifen der Motoren und es kommt zu einem lineareren, präziseren Regelverhalten (der ESC sagt dem Motor 18000-mal in der Sekunde, was er tun soll, der Serien-ESC nur 8000-mal).
• Die Serien-ESCs haben 125 Stellschritte (d.h. zwischen Vollgas und min. Drehzahl gibt es 125 Schritte, in denen die Drehzahl stufenweise (1/125) erhöht wird), ein geflashter SimonK-ESC hat 800 Stellschritte. Um diese Funktion nutzen zu können, muss der FC jedoch mit einem ATmega 2560 oder einem ATmega32u4 arbeiten, da diese 11 Bit PWM unterstützen (siehe oben).
Vorsicht: nach dem Flashen kann die Programmierkarte NICHT mehr verwendet werden. Dies spielt aber keine Rolle, da in der SimonK-Firmware die wichtigsten Einstellungen enthalten sind (z.B. der Unterspannungsschutz ist deaktiviert, ..).
Es gibt bereits geflashte Regler zu kaufen, diese sind teilweiße jedoch viel teurer als China-Regler und der einzige Unterschied ist die Firmware. Das Flashen selbst geht recht schnell und auch ohne Probleme (das schafft man auch als Anfänger). Prinzipiell ist jeder Regler flashbar. Man kann sich also einen China-Regler kaufen und nach 10 min ist er ein hochwertiger und vollkommen Muticopter-tauglicher SimonK-ESC. Eine super Anleitung gibt’s hier: http://www.rc-heli-fan.org/quadrocopter-co-f255/howto-esc-regler-flashen-t92521.html
BL-Heli-Firmware:
ist eine weitere Software zum Flashen von ESCs. Ursprünglich wurde sie für Helikopter entwickelt, miittlerweile werden auch MultiCopter unterstützt. Diese Software bietet viele Einstellungsmöglichkeiten, die Grundeinstellungen werden wie bei SimonK bereits voreingestellt. Im Gegensatz zur SimonK Software kommt die BL-Heli Software bei reglern mit SiLabsChips zum Einsatz. Nähere Details siehe: https://github.com/bitdump/BLHeli
Ein Dokument mit allen Flashbaren Reglern, der benötigten Pinbelegung zum Flashen und welche Software für den jeweiligen Regler empfohlen wird ist hier zu finden: https://docs.google.com/spreadsheet/ccc?key=0AhR02IDNb7_MdEhfVjk3MkRHVzhKdjU1YzdBQkZZRlE#gid=0
Akku:
Ein Akku dient als transportable Energieversorgung. Es gibt prinzipiell zwei Einsatzgebiete für Akkus im Multicoper-Bereich: zur Senderversorgung und zur Versorgung des Antriebs+Empfänger. Früher wurde für die Empfängerversorgung ein zusätzlicher Akku benötigt, der heutzutage aufgrund der BECs wegfällt (der Emfpänger wird von z.B. einem ESC mitversorgt).
Es gibt viele verschiedene Akkutypen: Blei (Pb), Nickel-Metall-Hydrid (NiMH), Nickel-Cadmium (NiCd), Lithium-Ionen (LiIo), Lithium-Polymer (LiPo), …
Jeder Akku-Typ hat seine Vor- und Nachteile, es werden hier nur die wichtigsten erklärt:
Nickel-Metall-Hydrid: haben ähnliche Eigenschaften wie ein Nickel-Cadmium-Akku. Seit dem Verbot von NiCd-Akkus wird immer öfters auf NiMH-Akkus zurückgegriffen.
NiMH-Akkus sind relativ Temperatuunempfindlich, haben einen niedrigen Innenwiderstand (d.h. die können hohe Ströme liefern, ohne dass die Spannung einbrichht) und können sehr schnell aufgeladen werden.
Nachteil ist eine hohe Selbstentladungsrate (bis zu 30%/Monat) und die starke Empfindlichkeit gegen Tiefentladung (ist die Zelle tiefentladen, kann man sie wegwerfen)
Dieser Akku-Typ wird bei Modellautos häufig als Motorversorger eingesetzt, im Multicopter-Bereich wird dieser Typ aufgrund seines Gewichtes nicht als Flugakku sondern nur als Senderakku (in der Fernbedienung) eingesetzt.
Lithium-Polymer: Diese Akkus haben eine extrem hohe Leistungsdichte, die alle anderen Akkutechnologien weit übertreffen. Sie können sehr hohe Ströme liefern und bieten trotzdem eine lange Flugzeit. Tiefentladung verkürzt die Lebensdauer dea Akkus, ruiniert diesen (bis zu einem gewissen Grad) aber nicht komplett.
LiPos zeichnen sich durch eine während der Entladung im Flug sehr konstante Spannungslage aus, wobei die Spannung zum Schluss rasch einbricht, was im Extremfall nicht nur einen bloßen Leistungsverlust zur Folge hat, der dringend zur Landung auffordert, sondern auch ein Abschalten aller Motoren durch einen Reset der Flight Control wegen Unterspannung bewirkt. Der Unterspannungspiepser muss schon sehr genau eingestellt sein, um nicht zu spät und nicht zu früh zu piepsen, was im Wechsel von unterschiedlichen Akkus und Lastgewichten (Kamera) vom Piloten oft vernachlässigt wird.
Besonders, wenn man Nickel-Akkus mit ihrem sanften Spannungsgefälle gewöhnt ist, ist in dieser Hinsicht Vorsicht geboten. Gegen Flugende hin sollten deshalb Vollgasschübe nur mehr bedingt gegeben werden.
Unten abgebildet ist die Entladekurve eines LiPo-Akkus. Anhand eines 3S Akkus wird ein Entladezyklus des Akkus beschrieben werden.
Anhang anzeigen 60732
Ein voll aufgeladener 3S Akku hat 12,6V (4,2V pro Zelle), diese Spannung sinkt gleich nach dem Anstecken auf ca. 11,1V, also die Nennspannung des Akkus ab (3,7V pro Zelle), diese Spannung bleibt dann beinahe die ganze Lebensdauer lang konstant. Ganz am Ende sackt die Spannung dann urplötzlich ab, die Spannung sollte aber nie unter 3,3V pro Zelle (bei 3S: 9,9V) absinken. Da der Spannungsabfall extrem schnell erfolgt, sollte ein Akkuwarner benutzt werden und dieser sollte spätestens bei 3,6V das erste Mal anschlagen, damit noch genügend Zeit zum Landen bleibt. Sinkt die Zellenspannung unter 3V ab, so ist die Zelle defekt und bläht sich auf. Dann sollte der Akku nicht länger benutzt werden, da akute Explosions/Brandgefahr besteht.
Nachteil: LiPos sind sehr empfindlich auf mechanische Beanspruchung, d.h. sie dürfen NIE mit scharfen Kanten oder Spitzen in Berührung kommen. Auch können diese Akkuzellen bei Überladung abbrennen/explodieren (und ein LiPo Brand ist nichts, was man gern im Zimmer hat). Mal einfach bei Youtube „LiPo exploding“ eingeben, dann weis man, was gemeint ist:
http://www.youtube.com/watch?v=CbD12lx2GUg
(interessant ab min 1:20). Innerhalb des Akkus sind mehrere Zellen in Serie geschaltet, um die Spannung zu erhöhen. Daher wird zm Laden von LiPos ein Balancer-Ladegerät benötigt, dass dafür sorgt, dass alle Zellen dieselbe Spannung haben.
LiPos sind die Standard Flugakkus, je nach Coptergröße normalerweise zwischen 2 und 4 Zellen.
Coptervarianten
Bei dem Multiwii-Copter kann man aus vielen verschiedenen Konfigurationen eine aussuchen. Bei der aktuellen MultiWii-Version 2.2 stehen folgende Varianten zur Verfügung. WICHTIG: Die schematischen Darstellungen der Copter sind für Atmega 2560-CPUs, welche im Arduino MEGA und allen darauf basierenden FCs (z.B. CRIUS AIOP V2,...) zum Einsatz kommen. Die Bilder dienen nur der Darstellung der Drehrichtungen, die Anschlussbelegung kann sich von anderen FCs unterscheiden (näheres siehe im Datenblatt des jeweiligen FCs).
• BI: bekannt aus dem Avatar Film, bei dem sämtliche Kampfhelikopter Bi-Copter sind. Dieser besteht aus zwei gegengleich drehenden Motoren, die jeweils von einem Servo geschwenkt werden. Dies ist nötig, um z.B. vorwärts oder rückwerts zu fliegen.

• TRI: besteht aus drei Motoren, bei denen jeweils zwei die gleiche Drehrichtung haben und der dritte von einem Servo geschwenkt werden kann.

• QUADP: wird auch „QUAD +“ genannt. Besteht aus vier Motoren, jeweils zwei haben die gleiche Drehrichtung). Diese Konfiguration hat einen Motor ganz vorne (Flugrichtung VORNE ist in Richtung dieses Motors) und sieht aus wie ein Plus, daher der Name.
• QUADX: Im Gegensatz zu QAUDP hat diese Variante 2 Motoren vorne (Flugrichtung VORNE liegt zwischen den beiden Frontmotoren). Diese Variante bietet den Vorteil, dass bei Kameraflügen kein Motor im Bild ist.
• Y4: ebenfalls vier Motoren, jedoch das Aussehen eines Tricopters (im Gegensatz zum Tricopter ist kein Servo zum Schwenken des Auslegers nötig) befinden sich zwei vorne (wie bei QUADX), die anderen beiden sind jedoch untereinander am selben Ausleger. Dies sieht aus wie ein Y (wobei am längeren Ausleger 2 Motoren montiert sind).

• Y6: ist sechsmotorig und in Prinzip ein doppelter Tricopter, jedoch ohne den Schwenk-Servo. Der Rahmen gleicht einem Tricopter, jedoch werden an einem Ausleger zwei Motoren untereinander montiert.

• HEX6: ein „normaler“ Hexacopter mit sechs Auslegern, mit einem Motor als Spitze (siehe QUADP)

• HEX6X: wie HEX6, jedoch mit zwei Spitzen-Motoren, siehe QuadX

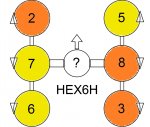
• HEX6H: ist eine neue Variante, in der jeweils 3 Motoren in einer Reihe angeordnet sind (da diese Variante neu und eher selten ist gibt es keine wirklichen schematischen Darstellungen, daher ist nicht bekannt für welchen Prozessor diese Pinbelegung stimmt (vermutlich ebenfalls ATmega2560), für nähere Informationen bitte im Datenblatt/Manual des jeweiligen FC nachlesen)
• OCTOFLATP: Copter mit 8 Motoren, P-Konfiguration

• OCTOFLATX: Copter mit 8 Motoren, X-Konfiguration

• OCTOX8: 8 Motoren, ein doppelter QUADX

• GIMBAL: ein 2-Achsen Servo Gimbal zur Kamerastabilisierung inclusive Kameraauslöser. Dies ist kein eigener Copter-Typ, da aber sehr oft Kameras an den Copter gehängt werden soll das Gimbal hier auch erwähnt werden. Es gehört nicht zur Ausstattung eines Anfängers und wird deshalb nicht weiter erklärt werden.
Des weiteren stehen einige Helikopter und Nurflügelkonfigurationen zur Auswahl (dies ist jedoch nicht der eigentliche Sinn hinter der Multiwii-Software, daher werden diese nicht näher erklärt).
Bauteildimensionierung
Zuerst muss man sich darüber Gedanken machen, was der Copter eigentlich können soll. Diese Entscheidung wirkt sich auf die gesamte Bauteilauswahl aus. Man kann seinen Copter sehr klein bauen, sodass er sehr schnell fliegt und auch für Kunststücke tauglich ist. Oder man baut einen Kameraträger. Dieser muss etwas größer sein, oft ein Hexacopter, um ein ordentliches Gewicht tragen zu können. Für einen Anfänger ist ein etwas größerer Quadrocopter (ca. 50cm) sehr gut geeignet. Damit kann man sowohl das Fliegen üben als auch eine Kamera dranhängen.
Es soll hier ein Quadrocpter mit ca. 50cm Durchmesser und mit genügend Tragkraft für eine leichte Kamera dimensioniert werden. Als Rahmen kann man entweder einen fertigen Rahmen kaufen, denn man nur noch zusammenschrauben muss, oder man baut einen eigenen. Man sollte nicht davor zurückschrecken, einen eigenen Rahmen zu bauen. Mit ein paar Alu-Profilen aus dem Baumarkt lassen sich ganz schöne Rahmen bauen (weitere Details folgen).
Als nächstes wird ein Flight-Controller gewählt:
Hierbei ist zu beachten, bei welchen Händlern man bestellt. Wenn man z.B. ohnehin bei Hobbyking bestellt, dann kann man den FC auch dort kaufen und man spart sich das Bestellen bei z.B. Flyduino.
Da die Motoren, Akkus, ESCs und viele Zubehörteile (die gerade ein Anfänger braucht und sicher nicht zuhause hat) auch bei Hobbyking bestellt werden (ist nicht bindend, man kann bestellen wo man will, nur in dieser Anleitung kommen die Teile eben von HK) wird hier nicht das NanoWii von Flyduino eingesetzt sondern das MicroWii von Hobbyking. Dieses Board bietet weiters den Vorteil, dass sämtliche Sensoren auf dem Board enthalten sind und sich ein Anfänger nicht um deren Anlöten kümmern muss. Link: http://www.hobbyking.com/hobbyking/...ga32U4_Flight_Controller_USB_BARO_ACC_MAG.htm
Der oben genannte FC arbeitet mit einem 32u4 Prozessor, wodurch es zu Problemen bei der Nutzung von GPS kommen kann (siehe oben, Prozessortypen). Falls trotzdem GPS genutzt werden soll, empfielt es sich, ein Board mit dem stärkeren und größeren ATmeag 2560 zu wählen. Dieses hier ist baugleich mit dem CRIUS AIO PRO V2 von RC Timer und eignet sich für jeden Coptertypen sowie sämtliche Ausstattung: http://www.hobbyking.com/hobbyking/...light_Controller_w_FTDI_ATmega_2560_V2_0.html
Nun müssen die Motoren und ESCs gewählt werden:
Da der Copter auch eine Kamera tragen können soll, wird ein etwas stärkerer Motor gewählt: http://www.hobbyking.com/hobbyking/store/__17345__NTM_Prop_Drive_Series_28_26A_1200kv_250w.html . NTM Motoren sind sehr gute, billige Motoren. Ich habe 11 von denen für meinen Octocopter bestellt, die laufen alle perfekt rund und vibrieren nicht. Prinipiell gilt: wer hochpräzise Motoren sucht, sollte sich besser in Europa umschauen (Robby Roxxy oder Tiger T-Motoren). Für einen Anfänger sind China-Motoren auf alle Fälle ausreichend, da sie teilweise annähernd die selbe Qualität haben wie europäische und viel weniger kosten. Wichtig: in vielen Fällen werden Erweiterungspacks mit z.B. einem Propellermitnehmer benötigt. Hier ist ein Erweiterungspack mit der anschraubbaren Welle und der Motorbefestigung erforderlich: http://www.hobbyking.com/hobbyking/store/__16719__NTM_Prop_Drive_28_Series_Accessory_Pack.html
Weiters solle sicherheitshalber eine Reservewelle und ein oder zwei zusätzliche Motoren bestellt werden (gilt auch für ESCs und Propeller)
http://www.hobbyking.com/hobbyking/store/__21302__NTM_Prop_Drive_2826_Series_Replacement_Shaft.html
Im Datenblatt des Motors (oder auf der Website) steht, wieviel Strom er maximal verbraucht. Dieser Wert ist für die Wahl des ESCs ausschalggebend.
Passend zum Motor müssen die Propeller gewählt werden. Jeder Motor hat eine KV Angabe. Der oben gewählte hat z.B.: 1200kv. Dies ist die Angabe der Umdrehungen pro Volt im Leerlauf (ohne Last = ohne Prop). Dieser Motor dreht bei einem Volt mehr um 1200U/min schneller. Dieser Wert ist für die Wahl der Props wichtig: grundsätzlich gilt: je kleiner der KV Wert, desto größer werden die Props. Für 1200KV sind 8 Zoll (=8“) Props eine gute Wahl. Die Propeller sollen nach Möglichkeit aus Carbon sein, da sie eine viel größere Steifigkeit haben. Da Carbon Props aber ungefähr das 10fache von normalen Plastik-Props kosten und sich das nicht jeder leisten kann/will, reichen für den Anfang auch normale Plastikpropeller. Wichtig: es müssen Props für beide Drehrichtungen (Im/gegen den Uhrzeigersinn) bestellt werden. Am besten man bestellt sich gleich ein paar Zusatzpaare, da am Anfang mit Sicherheit einige Props zu Bruch gehen.
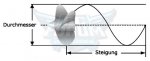
Bei einem Propeller wird immer der Durchmesser in Zoll (“) und die Steigung angegeben. Was der Durchmesser ist, muss ja wohl nicht weiter erklärt werden. Die Steigung entspricht der Strecke, die ein Propeller während einer Umdrehung in einem festen Material zurücklegen würde. Der für dieses Setup benutzte Prop hat diese Bezeichnung: 8x4,5 (auch 8045). Das bedeutet, er hat einen Durchmesser von 8 Zoll und eine Steigung von 4.5 Zoll, d.h. er würde bei einer Drehung in einem festen Material eine Strecke von 4,5 Zoll zurücklegen. Bei dem Bild ist leider eine Schiffsschraube angebildet, das Prinzip ist aber das selbe.
Carbon:
http://www.hobbyking.com/hobbyking/..._Propellers_1pc_Standard_1pc_RH_Rotation.html
Plastik:
http://www.hobbyking.com/hobbyking/...tandard_Rotation_2_pc_RH_Rotation_Green_.html
Die Farbe ist an sich egal, jedoch solle man Props mit zwei unterschiedlichen Farben kaufen, sodass man die Flugrichtung des Copters kennzeichnen kann (z.B. die vorderen beiden Props Grün, die hinteren beiden Rot)
ESC:
Bei dem ESC wird immer der maximal schaltbare Strom angegeben (wenn mehr fliest, rauchst der ESC ab!!) und die Zellenanzahl des zu benutzenden LiPos. Jetzt sucht man sich beim Händler je nach dem maximalen Strom und der Akkuzellen einen geeigneten ESC. Der hier gewählte Motor hat eine maximale Stromaufnahme von 18A, das heißt ein 20A ESC ist ausreichend. Da der ESC ohnehin geflasht werden sollte, sind die Programmierfunktionen erstmal egal, eine Programmierkarte wird in diesem Fall ebenfalls nicht benötigt. http://www.hobbyking.com/hobbyking/store/__15202__Hobby_King_20A_ESC_3A_UBEC.html
Vorteil bei diesem ESC: er verfügt über ein UBEC (Vergleich zu BEC: weniger Abwärme) und er kann auch mit 4S arbeiten (das heißt, man kann später ohne Schwierigkeiten/Hardwareumbau auf einen 4S Akku wechseln, da auch der Motor 4S unterstützt).
Wenn man einen falschen Akku wählt dann funktioniert nichts oder wenn man Pech hat ruiniert man sich eine Menge. Deshalb muss der Akku genau auf das gewählte/vorhandene Motor+ESC Setup abgestimmt werden. Dazu müssen erstmal die Angaben auf dem Akku erklärt werden (wobei X immer für die Variable steht, dieser Wert ist von Akku zu Akku unterschiedlich):
XXXXmAh (milli Ampere Stunden), z.B.: 2500mAh: Dies ist die Kapazität des Akkus. Sie besagt, dass man über einen Zeitraum von einer Stunde genau 2500mA = 2,5A entnehmen kann, bevor der Akku leer ist. Bei einer höheren Kapazität kann man bei gleichbleibender Leistung länger Leistung aus dem Akku entnehmen (z.B.: man benötigt konstant 2,5A und hat einen 5000 mAh Akku --> man könnte eine Stunde lang 5A entnehmen. Da man aber nur 2,5A benötigt (die Hälfte von 5A), kann man diese über 2 Stunden entnehmen).
X S, z.B.: 3S: Dies ist die Zellenangabe (S steht für Zellen). Da eine LiPo Zelle nur 3,7V liefert, die FCs und Motoren aber mehr brauchen, werden in einem Akkupack mehrere Zellen von gleicher Kapazität in Serie geschaltet, was die Spannung erhöht. Ein 2 Zellen Akku hat 7,4V (3,7V + 3,7V) Spannung, der oben genannte 3S Akku hat demnach 11,1V.
Mehr Zellen erhöhen bei gleich bleibendem Stromverbrauch die Leistung, da sich die Leistung wie folgt berechnet: P = U * I: wird die Spannung (U) erhöht und der Strom (I) bleibt gleich, dann erhöht sich die Leistung (P)
XX C, z.B.: 20C: C steht für dem maximalen Entladestrom. 1C ist der Entladestrom, den man eine Stunde lang entnehmen kann, bevor der Akku leer ist. Das heißt das bei einem 2500mAh Akku ein C gleich 2,5A ist. Die Angabe von 20C bedeutet, dass man den Akku mit maximal 20*1C = 20*2,5A = 50A belasten kann, ohne ihn dauerhaft zu beschädigen. Diese Angabe stammt vom Hersteller, man sollte sie nicht unbedingt ausreizen.
Normalerweise wird zuerst der Motor gewählt und im Anschluss ein passender Akku. Im Datenblatt des Motors / auf der Website des Händlers steht, wieviel Strom der Motor maximal verbraucht. Der oben gewählte Motor hat eine maximale Stromaufnahme von 18A. Da ein Quadrocopter vier Motoren hat, muss dieser Wert mit vier multipliziert werden (max. Stromaufnahme * Anzahl der Motoren). Dies ergibt den Strom, der bei Vollgas benötigt wird. In diesem Fall ergibt das 72A. Da der gewählte Akku aber maximal nur 50A liefern kann, ist dieser für diesen Copter zu klein. Es kann jetzt entweder die Kapazität oder die C-Rate erhöht werden. Es gilt zu beachten: Je mehr Kapazität der Akku hat, desto schwerer wird er. Durch den größeren Akku wird der Copter wiederum schwerer, wodurch die Motoren höher drehen müssen, um den Copter in die Luft zu heben. Dadurch dass die Motoren schneller drehen verbrauchen sie auch mehr Strom, wodurch der Akku schneller leer wird. So heben sich die Effekte von einem größeren Akku und dem größeren Gesamtgewicht gegenseitig auf und die Flugdauer bleibt ungefähr die gleiche +-1min. Das selbe gilt bei der Parallelschaltung mehrerer Akkus: mehr Akkus = höhere Kapazität = mehr Gewicht = höhere Motordrehzahl benötigt = höherer Stromverbrauch = selbe Flugdauer trotz mehrerer Akkus.
Es muss das optimale Verhältnis zwischen Gewicht und Kapazität gefunden werden. Dafür gibt es keine Regel, das muss jeder selbst entscheiden. Für einen Anfänger ist vielleicht ein leichterer Copter von Vorteil, da sie leichter zu bewegen sind.
Hier wird ein 3S Akku mit einer Kapazität von 3000mAh und 25C Dauerentladestrom gewählt: Max. Strom = 3A*25 = 75A, für diesen Copter ausreichend (Akkugewicht: 230g). Link: http://www.hobbyking.com/hobbyking/store/__11919__Turnigy_nano_tech_3000mah_3S_25_50C_Lipo_Pack.html
WICHTIG: Was fast alle bei der Akkudimensionierung vergessen ist, dass der maximale entladestrom immer von der momentanen Kapazität abhängig ist, und diese im Flug sinkt. Sind anstatt der 3000mAh nur noch 1500mAh im Akku, so ist der maximale Entladestrom = 1,5A*25 = 37,5A und wäre somit nicht mehr hoch genug, um die Motoren bei voller Leistung zu versorgen. Dieser Fakt ist für einen Anfänger (und den Großteil aller anderen Modellbauer) unbedeutend, da der Copter nur selten mit Vollgas geflogen wird. Zumeist schwebt man oder steigt langsam in die Höhe, bei all diesen Aufgaben laufen die Motoren deutlich unterhalb ihrer Leistungsgrenze, daher wird der Maximalstrom selten benötigt. Des weiteren haben alle Akkus einen Burst-Entladestrom, der weit über dem Dauerstrom liegt und für ca. 10s entnommen werden darf. Bei dem oben dimensionieren Akku beträgt die Burst-Rate 50C. Dies ergibt bei 1500mAh im Akku max. Strom = 1,5A*50 = 75A und damit mehr als ausreichend um die Motoren zu versorgen. Wird auch der Burst-Entladestrom zu klein um mit Vollgas fliegen zu können sollte man ohnehin bald landen, da die Akkulaufzeit dem Ende zugeht.
Kurz gesagt: Der oben genannte Akku ist ausreichend, da man ohnehin selten mit Vollgas unterwegs ist.
Des Weiteren müssen noch Zusatzteile wie der Programmieradapter für das Board (hier reicht ein Mini-B USB Kabel), ein Adapter zum flashen der ESCs, Kabel, Goldkontaktstecker, Heißschrumpfschläuche und vieles mehr bestellt werden:
http://www.hobbyking.com/hobbyking/store/__68__PolyMax_3_5mm_Gold_Connectors_10_PAIRS_20PC_.html
http://www.hobbyking.com/hobbyking/...0_Connectors_Male_Female_5_pairs_GENUINE.html
http://www.hobbyking.com/hobbyking/store/__27195__Atmel_Atmega_Socket_Firmware_Flashing_Tool.html
http://www.hobbyking.com/hobbyking/store/__5278__Turnigy_5mm_Heat_Shrink_Tube_b_RED_b_1mtr_.html
http://www.hobbyking.com/hobbyking/store/__3833__Turnigy_5mm_Heat_Shrink_Tube_BLACK_1mtr_.html
http://www.hobbyking.com/hobbyking/store/__29652__On_Board_Lipoly_Low_Voltage_Alarm_2s_6s_.html
Es werden möglicherweise noch weitere Bauteile benötigt, diese müssen selbstverständlich mitbestellt werden. Diese Einkaufsliste dient nur als Muster, fehlende Bauteile müssen eventuell bei anderen Händlern bestellt werden.
Multicopter mit Bauteilen aus Europa
Es ist natürlcih auch möglich, den gesamten Multicopter mit Bauteilen aus Europa zu bauen. Dies hat den Vorteil dass man nicht 4 Wochen auf die Bauteile warten mus und keine Zollgebühren anfallen. Außerdem sind europäische Produkte meist qualitativ hochwertiger als aus China. Ein weiterer Vorteil ist, dass man im Falle eines defekts den Händler einfach anschreiben kann, um das Bauteil auszutauschen, was man bei China-Händler nicht immer kann.
Bei Flyduino erhält man fast alle Bauteile für einen Multicopter:
Wer keinen eigenen Rahmen bauen möchte, der kann diesen heir nehmen, ein solider, simpler Rahmen, bei dem man auch die Arme nach einem Crash sehr leicht tauschen kann:
http://flyduino.net/Quadrokopter-Rahmen-Set-25cm-arm
und noch ein Landegestell dazu:
http://flyduino.net/Landegestell-Hoch
Als Motoren kann man die Suppos empfehlen, diese brinden bei max. 12A Verbrauch ca. 800g Schub, ein Motor bringt ca. 800-900g Schub, also ideal für einen Copter von max. 800g (da kann man einen ordentlcihen Quad bauen) und haben dann noch genug Reserven nach oben.
http://flyduino.net/Multikopter-Motor
Zu diesen Motoren braucht man 9-10" Props. Es ist empfehlenswert, die Propeller in 2 verschiedenen Farben zu kaufen sodass man beim Fliegen Vorne erkennen kann. Man montiert eine Farbe an den vorderen Props und die andere Farbe an den hinteren Props, dann erkennt man immer schön, wo vorne ist. Das wären für 9" diese hier: grün
schwarz
Für 10" diese hier:
grün
schwarz
Für den Anfang sollte man beide Größen kaufen, dann kann man selbst testen, welcer Propeller besser zum Copter passt. Außerdem sollten gleich 10-20 Paare gekauft werden, da am Beginn die Props Verschleißware sind.
Als ESCs empfehlen sich bereits auf SimonK-Firmware geflashte 20A ESCs:
http://flyduino.net/Flyduino-NFET-HEXFET-20A-ESC-SimonK-Firmware
Je nach gewünschter Flugdauer und Coptergewicht kann man einen der folgenden Akkus wählen (genaueres zur Dimensionierung siehe oben). Für diese Motoren sind 3S Akkus erforderlich.
Dieser ist klener und für einen von grund auf leichten Copter:
http://flyduino.net/Flyduino-XMania-Lipo-3s-2200-mAh-60c
Dieser ist etwas größer und für schwerere Copter:
http://flyduino.net/Flyduino-XMania-Lipo-3s-2500-mAh-25c
Um im Flug gewarnt zu werden, wenn der Akku leer wird, gibt es diesen LiPo Warner (der ist echt Luxusausstattung mit 2 Lautsprechern und 7-Segmentanzeige):
http://flyduino.net/1S-8S-Dual-Speaker-Lipo-Alarm-8S-Voltage-Tester-Lipo-Checker
Um den LiPo am Copter anzuschließen werden noch XT-60 Stecker benötigt:
http://flyduino.net/XT60-Stecker-und-Buchse
Um dem ganzen Copter ein ordentliches Aussehen zu verpassen empfiehlt es sich, eine Stromverteilerplatine einzubauen:
http://flyduino.net/Flydubution-Stromverteiler-Board
Als FC kann man für einen einfachen Quad ohne Baro, MAG oder GPS das NanoWii wählen:
http://flyduino.net/Multikopter-FC-Multiwii
-------Unterbrechung---------
Dieser FC ist leider nicht mehr käuflich erwerbbar, es wird bereits nach einem Ersatz gesucht, bitte bis zur nächsten Aktualisierung der Anleitung warten oder das Naze32 aus Japan bestellen
Wenn man alle Sensoren benutzen möchte oder später auf GPS aufrüsten will, so empfiehlt sich dieses Board:
Das Board hat den Vorteil, einen schnelleren 32Bit Prozessor verbaut zu haben, der auch die komplexe GPS Berechnung durchführen kann.
----------------------------------------
Um das Board schön auf dem Copter zu montieren gibt es Polymer-Distanzbolzen:
http://flyduino.net/Distanzbolzen-10mm-M3-Polyamid
Damit wären alle wichtigen Bauteile genannt, damit man einen ordentlichen Quadrocopter bauen kann. Werkzeuge und Lötkolben werden ebenfalls benötigt, wie auch ein LiPo Ladegerät, alles erhältlich bei Conrad.
Wenn wem Fehler auffallen, bitte in einen Kommentar schreiben, dann werden die Fehler ausgebessert.
Grüße, Moritz
Einleitung
Multicopter erlangen immer größere Beliebtheit unter Modellbauern und ziehen auch Neulinge in ihren Bann. Aufgrund ihres leichten Aufbaus und der Open Soure Software steigt die Zahl der Copter-Begeisterten ständig an.
Das MultiWii-Projekt wurde von dem Franzosen Alexandre Dubus aus Paris im Sommer 2010 ins Leben gerufen und hat sich seit dem um einiges weiterentwickelt. Bei jeder neuen Version werden neue Funktionen hinzugefügt und neue Hardware unterstützt. Da beginnt auch ein häufiges Problem, fehlende Bauanleitungen für aktuelle Hardware.
Im Internet kursieren viele verschiedene Bauanleitungen für sämtliche Copter-Konfigurationen, sei es ein Quadrocopter oder ein schwerer Hexacopter. Das Problem mit diesen Anleitungen ist, dass die meisten von ihnen veraltet sind.
Mulitcopter erfreuen sich einer immer größeren Beliebtheit, was auch die Entwicklung neuerer Sensoren und fortschrittlicher Technik beschleunigt. Die in den vorhandenen Bauanleitungen benutzten Bauteile sind längst nicht mehr aktuell und im Vergleich zu den aktuellsten Modellen einfach nur schlecht.
Diese Anleitung befasst sich mit dem Aufbau eines großen Octocopters (für Kameraflüge und FPV) mit modernster Sensortechnik und Steuereinheiten. Anhand dieses Beispiels werden die verschiedenen Sensoren, ihre Funktions- und Wirkungsweise sowie dem Zusammenbau zu einer funktionstauglichen Coptersteuerung erklärt.
In der nachfolgenden Erklärung werden die Begriffe „stark veraltet“, „antik“ usw. benutzt. Die beschriebenen Techniken stammen keineswegs aus der Antike, es handelt sich nur um wenige Jahre, die in diesem Bereich des Modellbaus jedoch riesige Unterschiede ausmachen.
Wie ist ein z.B. Quadrocopter aufgebaut und wie steuert man ihn?
Der Copter besteht nur aus Motoren und kommt komplett ohne Zusatzrotoren oder Steuerflächen aus. Sämtliche Bewegungen werden durch Änderungen der Drehzahlen verschiedener Motoren hervorgerufen. Um bei gleich drehenden Motoren kein Moment um die Hochachse (Z/Gier-Achse, hier: aus dem Bild heraus) zu haben müssen jeweils zwei Rotoren gegeneinander laufen. Deshalb muss man zwei rechtslaufende und zwei linkslaufende Luftschrauben einsetzt.
Wenn nun die linksdrehenden Luftschrauben schneller drehen als die rechtsdrehenden Luftschrauben, entsteht ein Moment um die Hochachse und der Quadrocopter dreht sich. Will man nach vorne fliegen, müssen die hinteren Luftschrauben schneller drehen, damit der Quadrocopter nach vorne kippt. Das gleiche gilt für das Fliegen zur Seite. Um hoch zu fliegen müssen dann alle Luftschrauben gleichermaßen schneller drehen.
Alle veralteten Bauweisen sind im folgenden Text hellblau markiert, sie sollten unter KEINEN Umständen für den Bau eines neuen Multicopters benutzt werden.
Das Herz eines jeden Copters ist ein Microcontroller. In älteren Bauanleitungen wird oft ein gewöhnliches Arduino Pro Mini verwendet, das in eine Lochrasterplatine gesteckt wird. Dieses ist aus heutiger Sicht nahezu antik, heutzutage werden eigene (Flug-) Steuerboards benutzt (engl. Flight Controller, kurz FC), die bereits den Microcontroller, Stützkondensatoren usw. auf dem Board verlötet.
Der Vorteil liegt darin, dass keine externe Beschaltung mehr nötig ist. Es müssen nur noch die Pin-Leisten angelötet werden, an denen schließlich die ESCs, Sensor und Empfänger angeschlossen wird. Dies bietet vor allem für Anfänger enorme Vorteile, da weniger gelötet und Fehler beim Anschließen minimiert werden. Ein weiterer massiver Vorteil sind die bereits auf dem Board verbauten Spannungsregler, mehr siehe Spannungsversorgung.
Sämtliche für MultiWii Copter benutzte Microcontroller werden von Atmel gefertigt und mit der Arduino-Software programmiert. Die MultiWii-Software ist eine Open-Source Software, mehr dazu bei der Programmierung.
Spannungsversorgung
Der Microcontroller bzw. der Flight Controller arbeiten mit 5V, auch die meisten der Sensoren arbeiten mit 5V, manche jedoch auch mit 3,3V.
Die meisten der fertig zu kaufenden FCs verfügen sowohl über einen 5V Spannungsregler-IC (ein Spannungsregler begrenzt den max. fließenden Strom und gleicht Batterieschwankungen aus, auch BEC genannt, für Battery Eliminator Circuit), als auch über einen 3,3V Spannungsregler-IC, um die benötigten Spannungen erzeugen zu können (nicht zu verwechseln mit UBEC) .Es gibt meist einen Pin, an dem die 3,3V abgegriffen werden können.
Unterschied BEC – UBEC:
Das BEC (auch lineares BEC) wandelt den Spannungsüberschuss (Differenz zwischen der Eingangs (=Akku) und der Ausgangsspannung) in Abwärme um --> bei hoher Differenz wird das Teil ordentlich heiß.
Das UBEC (auch Switching BEC) ist ein getaktetes BEC, dass die Spannung nicht dauerhaft durchlässt sondern nur in gewissen Abständen --> es hat eine erheblich kleine Abwärme / einen höheren Wirkungsgrad als das lineare BEC.
Das FC-Board kann über verschiedene Wege mit Spannung versorgt werden:
1) Über den LiPo-Akku.
Der Flight Controller wird mit dem Plus und dem Minus-Pol des Akkus verbunden und die auf dem Board verlöteten Spannungsregler wandeln die Spannung zu den benötigten 5V. Je nach Board können 2 und 3 Zellen-Akkus oder 3 und 4 Zellen-Akkus angeschlossen werden. Vor dem Anschließen AUF JEDEN FALL im Datenblatt des FCs nachsehen, wie der Akku richtig angeschossen wird. Bei falschem Anschluss kann es passieren, dass der Spannungsregler beschädigt wird. Aus diesem Grund wird diese Variante nach Möglichkeit vermieden und der FC durch das BEC des Reglers versorgt, siehe 2).
2) Über BEC eines ESCs
Einfach gesagt: Ein ESC (Electronic Speed Controller) leitet die Energie des Akkus kontrolliert an den Motor. Dazu ist ein Microcontroller nötig, der die Signale es FCs verarbeitet. Auch dieser Microcontroller benötigt 5V, deshalb wandelt der ESC einen Teil der Akkuspannung auf 5V. Diese liegen auch am Plus-Pin des Steckers an.
Bei der Versorgung über das BEC wird das Board über die Spannung an diesem Pin versorgt. Aufgrund der Leichtheit der Versorgung (ESC muss ja sowieso angesteckt werden) und der Sicherheit gegen Falsch-Anschließens (wenn ein Fehler passiert, wird nur der ESC um 10$ defekt und nicht der wesentlich teurere FC) ist dies die einfachste und meist verwendete Methode.
3) Über ein externes BEC
Die meisten FCs verfügen auch über Pins, die direkt an 5V angeschlossen werden können. Wenn es erwünscht wird kann ein externes BEC am Akku angeschlossen werden, die 5V auf die oben genannten Pins angelegt werden. Dies wird nur in Betrcht gezogen, wenn der interne Spannungsregler defekt ist und/oder der ESC kein BEC hat.
Sensorik
Um einen MultiWii-Coter in die Luft zu bekommen ist zumindest ein Sensor nötig, der Lagesensor. Es gibt jedoch viele weitere Sensoren, die neue Funktionen ermöglichen. Diese Sensoren sind ein Beschleunigungssensor, ein Barometer, ein Magnetometer, ein GPS Modul und ein Sonar.
Noch ein Begriff vorneweg: Da die Sensoren nur kleine Chips sind, die man nur schwerlich irgendwo festlöten kann, werden die Sensoren bereits auf Boards gelötet verkauft (auf dem Board befinden sich auch externe Pull-Ups und Kondensatoren). Diese Boards nennt man Break-Out-Boards, kurz BOB.
Lagesensor
Die Grundlage eines jeden Copters ist das Gyroskop (kurz GYRO, auch Lagesensor genannt). Um ein flugtaugliches Modell zu bauen, wird mindestens ein Gyro und ein Microcontroller benötigt.
Ein Gyroskop ist ein Drehratensensor. Er arbeitet ähnlich einem Kreiselkompass. Das Ausgangssignal ist proportional zur Winkelgeschwindigkeit (°/s). Das Gyro überprüft, ob es zu einer Abweichung der Achsen zu den tatsächlichen Werten gibt und gibt diese Abweichungen an die Steuerung (den FC) weiter. Bei bekannter Geschwindigkeit lässt sich somit der Winkel, um den sich das Objekt gedreht hat, bestimmen.
Wer die Funktionsweise genauer wissen will, kann sich dieses Video anschauen. Für den Modellbau ist das Video ab Minute 3:20 interessant:
http://www.youtube.com/watch?v=cquvA_IpEsA
Während ein Gyroskop früher aus einem Kreiselsystem aufgebaut war, ist es heute möglich, ein gesamtes 3-Achsen Gyro (X,Y,Z) auf einen Chip mit der Größe von wenigen Millimetern zu schrumpfen. Ausschalggebend ist die von InvenSense entwickelte MEMS-Technik (Microelectromechanical System). InvenSense produziert auch die aktuell besten Lage und Beschleunigungssensoren (siehe mehr unten).
Beschleunigungssensor
Ein Beschleunigungssensor (engl. acceleration sensor, kurz ACC) ist ein Sensor, der die Beschleunigung misst, indem die auf eine Testmasse wirkende Trägheitskraft bestimmt wird. Somit kann z. B. bestimmt werden, ob eine Geschwindigkeitszunahme oder -abnahme stattfindet. Mithilfe des Beschleunigungssensors kann sich der Copter jederzeit wieder in eine waagrechte Lage bringen.
Unterschied zwischen Gyro und ACC
Ein Beschleunigungssensor misst die translatorische Beschleunigung in der Richtung, für die er gebaut ist. Ein Gyro misst die rotatorische Geschwindigkeit Dreh/Winkelgeschwindigkeit) um die Achse, für die es gebaut ist.
Es werden zwei unterschiedliche Dinge gemessen: das ACC misst die Zu/Abnahme einer (ideal: Linearen) Längsbewegung und das Gyro die Änderung einer Drehbewegung.
Barometer
Ein Barometer (kurz Baro, Luftdrucksensor, engl. Altimeter) ist ein Messgerät zur Bestimmung des statischen Absolut-Luftdrucks. Im Falle von Multicoptern wird es indirekt zur Höhenmessung eingesetzt. Durch die Änderung des Luftdrucks kann errechnet werden, um wie viele Meter der Copter gestiegen/gefallen ist. Eine spezielle Form des Baros ist das Mikrobaro, das bereits minimale Druckunterschiede messen kann und die Höhe auf Zentimeter genau bestimmen kann.
Magnetometer
Das Magnetometer (kurz: MAG, engl. Magnetometer) ist ein Sensor zum Bestimmen der Himmelsrichtung. Das MAG funktioniert in Prinzip wie ein elektronischer Kompass. Es erkennt das Erdmagnetfeld und teilt der Steuerung die Abweichung zum Norden mit.
GPS
Das Global Positioning System (kurz: GPS) ist ein globales Navigationssatellitensystem zur Positionsbestimmung. GPS hat sich als das weltweit wichtigste Ortungsverfahren etabliert und wird in Navigationssystemen weitverbreitet genutzt. Mit einem GPS Modul ausgestattet kann ein Copter unter anderem an einer Position schweben bleiben und auch bei Wind nicht abdriften Position Hold, kurz: PH) oder auf Knopfdruck zum Startpunkt zurückfliegen (Return to Home, kurz: RTH)
Des Weiteren gibt es noch einen Sonarsensor, der mittels Ultraschall-Messung die Entfernung zu einem Objekt bestimmt. Das Sonar wird bei MultiWii-Coptern an der Unterseite montiert und soll eine selbstständige Landung des Copters ermöglichen (wenn es wahr ist. Das Sonar wird noch nicht häufig eingesetzt und da ich es selbst noch nie benutzt habe, will ich keine Unwahrheiten verbreiten)
Erklärung 6DOF, 10DOF IMU
Bei den nachfolgenden Sensoren gibt es viele kombinierte Sensorboards, die unter anderem die Bezeichnungen 6DOF oder 10DOF tragen. Dabei steht DOF für Degrees of Freedom (auf Deutsch: sechs Freiheitsgrade). Ein Freiheitsgrad ist sozusagen eine gemessene Achse. Bei 6 Freiheitsgraden heißt dass, das es 6 verschiedene Achsen gibt. Im Falle einr 6DOF sind das X,Y und Z Achse das Gyros und X, Y und Z Achse des ACCs. Bei der 10DOF kommen noch die X, Y und Z Achse des MAG und die Höhe des Baros dazu.
Das heißt, eine 6DOF besteht zumeist aus Gyro+ACC, eine 10DOF aus Gyro+ACC+Baro+MAG.
Erkläung IMU: Die kombinierten Sensorboards werden oft als IMUs bezeichnet. IMU steht für Inertial Measuring Unit, was sowie wie interne Messeinheit bedeutet. Als IMU wird alles bezeichnet, dass aus zumindest einem Gyro und einem ACC besteht.
Es folgt eine Liste mit den jeweiligen Sensoren, dabei werden veraltete Sensoren Blau geschrieben, die Schwarz geschriebenen sind auf dem aktuellen Stand der Technik und werden für einen Copter empfohlen.
Lagesensoren:
Wii Motion Plus (kurz: WMP): Der Anfang der MultiWii Copter und der Namengeber dieser Copter-Bauart. Er wird von InvenSense produziert und ist einer der ersten Lagesensoren, der mit der MEMS-Technik erzeugt wird. Ihrerzeit waren diese Sensoren aus einem Wii Motion Plus-Controller auszubauen und bildeten die Grundlage für jeden Copter. Dieser Sensor unterstützt nur eine I²C Taktfrequenz von 100kHz. Heute sind diese Sensoren komplett veraltet und nicht weiter zu empfehlen, da moderne Sensoren eine vielfach höhere Genauigkeit aufweisen.
ITG3200: ist ein von InvenSense produzierter 3-achsiger Lagesensor, jedoch mittlerweile auch nicht mehr aktuell, jedoch besser als das Original WMP. Dieser Sensor unterstützt bereits eine I²C Taktrate von 400kHz, ebenso wie alle weiteren Sensoren.
L3GD20: von der Genauigkeit ungefär wie das ITG3200, auch schon abgelöst
Weitere Gyros weiter unten bei „Kombinierte Sensoren“
Beschleunigungssensoren:
Wii Nunchuk: das Nunchuk wird ebenfalls aus dem Controller ausgebaut. Dies war die erste Möglichkeit, einen 3 achsigen Beschleunigungssensor in einen Copter einzubauen. Dieser Sensor wurde recht bald durch das BMA020 ersetzt, und sollte heute ohnehin nicht mehr eingesetzt werden.
BMA020: ist der erste Beschleunigungssensor, der speziell für den Einsatz im Modellbau gekauft werden kann. Das Bosch BMA020 wird bereits auf einem BOB ausgeliefert und muss nur noch über den I²C Bus mit dem FC verbunden werden. Auch dieser Sensor sollte nicht weiter verwendet werden.
BMA180: ist der Nachfolger des BMA020, jedoch auch schon veraltet.
Weitere ACCs weiter unten bei „Kombinierte Sensoren“
Barometer:
BMP085: war der erste zum Einsatz kommende Luftdrucksensor. Da es bisher nur 2 Baros gibt, ist er (leider) immer noch oft die erste Wahl, jedoch gibt es einen wesentlich präzieseres Baro, siehe unten. Der Job des Baros ist es, die Höhe zu halten. Da ist eine möglichst hohe Genauigkeit von Vorteil, da der Copter sonst bis zu einem Meter auf und ab schwankt
MS5611: Bei dem MS5611 handelt es sich um den leistungsstärksten Lusftdrucksensor. Er schaft eine Auflösung von bis zu 0,012 mbar, was umgerechnet ca. 10 Zentimetern entspricht. Weiters zeichnet er sich durch einen sehr kleinen Stromverbrauch und einer niedrigen Toleranz aus. Der MS5611 ist der aktuell beste Luftdrucksensor, der dem BP085 unter allen Umständen vorzuziehen ist.
Magnetometer:
HMC5843: war das erste Magnetometer im MultiWii Bereich. Es wird von Honeywell gefertigt und ist mittlerweile durch das HMC5883 ersetzt worden. Es verfügt über eine Auflösung von 7 Milligauss.
HMC5883: ist der Nachfolger des HMC5843. Es verfügt über eine Auflösung von 5 Milligauss und ist somit das genaueste Magnetometer für MultiWii.
Weitere Magentometer weiter unten bei „Kombinierte Sensoren“
GPS
Die meisten der im Handel erhältlichen GPS Module funktionieren einwandfrei mit der MultiWii Software. Da das GPS erst seit kurzem im Copterbau eingesetzt wird, gibt es noch nicht wirklich stark überarbeitete Module, die alle anderen in den Schatten stellen. Man findet mit den meisten GPS Modulen auf Anhieb 5-8 Satelliten, was ohnehin das Maximum an Satelliten darstellt.
Kombinierte Sensoren (in einem Chip):
LSM303DLM: vereint einen Beschleunigungssensor und ein Magnetometer in einem Chip. Die Kombination von ACC und Mag ist sinnvoll wenn man ein 3 Achsen Magnetometer ausliest, und nacher wissen will wo die Himmelsrichtungen sind. Ohne die Lage im Raum (ACC) ist das nämlich nicht möglich. Als Handycompasschip/GPS-Kcompasschip ist der LSM303DLM vollkommen ok, da keinb Gyro erforderlich ist. Das spart Platz, Strom und Geld. Für Multicopter wird zusätzlich noch ein Gyro benötigt, deshalb wird es oft in Verbindung mit dem ITG3200 verkauft. Wie dem sei, das LSM303DLM gehört nicht mehr zu den idealsten Lösungen, eine MPU6050 und ein HMC6883 ergeben eine bessere Kombination.
MPU6050: ist DER meistbenutzte Sensor im aktuellen Copterbau (Stand:März 2013). Die MPU6050 wird von InvenSense gefertigt und vereint ein hochpräzises Gyro und einen hochpräzisen Beschleunigungssensor in einem Gehäuse. Durch diese Bauweise und weil die internen Sensoren die genauesten sind, empfehle ich für jeden Neubau diesen Sensor als Gyro+ACC. Keiner der oben genannten Sensoren erreicht annähernd die Genauigkeit der MPU6050.
Die MPU6050 liefert beste Flugerlebnisse in Kombination mit einem HMC5883 MAG und einem MS5611 Baro (alle 3 Sensoren auf einem BOB: http://www.drotek.fr/shop/en/62-imu-10dof-mpu6050-hmc5883-ms5611.html).
MPU9150: Dieser Sensor ist in der aktuellen MultiWii-Software (V2.2) noch nicht integriert, jedoch wird er das mit Sicherheit bei der neuen Version sein. Ich schreibe den Sensor denoch dazu, da ich denke, dass er die Zukunft ist. Die MPU9150 ist der erste 9-Achsen Sensor der Welt und vereint Gyro, ACC und MAG in einem Chip.
Es werden hier nicht sämtliche Boards von kombinierten Sensoren aufgezählt, da die Sensoren in Prinzip auf der Platine an den I²C Bus angeschlossen sind und an da nicht allzu viel falsch machen kann. Es sollte darauf geachtet werden, dass die modernsten Sensoren verbaut sind, die fertigen Boards sollten eigentlich alle problemlos funktionieren, egal wo man sie kauft.
Zusammenfassend kann man sagen, die beste Kombination/die modernsten Sensoren ihrer Klasse sind:
Gyro: MPU6050, MPU9150
ACC: MPU6050, MPU9150
Baro: MS5611
MAG: HMC5883, MPU9150
GPS: die meisten GPS-Module sind für die MultiWii-Funktionen gut geeignet
Flugcontroller
Der Flugcontroller (kurz: FC) ist das Herz eines jeden Multicopters. Er besteht aus einem Atmel Microcontroller (kurz: µC) und der nötigen Außenbeschaltung sowie den Anschlusspins für Empfänger, Regler und Sensoren. Es bekommt vom Empfänger die Steuersignale und muss diese mit den Sensorwerten verknüpfen und über die Regler auf die Motoren übertragen.
Es gibt viele verschiedene Microcontroller, die im MultiWii-Bereich eingesetzt werden. Prinzipiell kann jeder µC verwendet werden, jedoch kann ich aus heutiger Sicht nur zu zwei µC raten, die 11 Bit PWM unterstützen und somit SimonK ESCs ansteuern können (mehr siehe unten bei ESCs). Diese beiden wären einerseits der große Atmel ATmega 2560 und der kleinere Atmel ATmega32u4. Es gibt auch FCs, die bereits sämtliche Sensoren (meist Gyro, ACC, MAG und Baro) fix auf der Steuerplatine verlötet haben. Die Tendenz zu diesen sogenannten AIO (All In One) FCs ist stark ansteigend.
ATmega 2560: dieser Microcontroller ist groß genug für sämtliche möglichen Konfigurationen. Ursprünglich ist der ATmega auf dem Arduino MEGA verbaut, das heißt es wird in Arduino auch als Arduino MEGA definiert, mehr siehe Software. Er verfügt über genügend In und Outputs, um jeden Copter inclusive Kamera Gimbal ansteuern zu können. Es werden also Copter bis zu einem Octocopter mit Kamera Gimbal unterstützt. Es gibt 14 Pins mit 11 Bit, daher eine ideale Kombination mit geflashten SimonK Reglern. Zur Kommunikation mit anderen Bauteilen oder dem PC stehen ein USB-Anschluss, ein SPI Bus, ein I²C Bus und 4 UART Schnittstellen.
Ein FC basierend auf diesem Prozessor ist ideal für einen große Copter mit Kamera-Gimbal.
ATmega32u4: ist ein kleinerer Prozessor, der über 6 hochauflösende PWM Ausgänge verfügt. Dieser Prozessor ist auch auf dem Arduino Leonardo verbaut --> Leonardo Bootloader. Es können auch Octocopter unterstützt werden, dann gibt es jedoch keine weiteren Ausgänge für eine Kamera oder ähnliches. Es werden nur Hexacopter mit Kamera-Gimbal unterstützt. Bei Boards mit diesem Prozessor kann es zu Platzproblemen mit der Sketch-Größe kommen. Es wird die MultiWii-Software 2.1 ohne GPS noch voll unterstützt, mit GPS oder Version 2.2 ist der Sketch für den Flash Speicher zu groß. Um dieses Problem zu beheben, muss ein kleinerer Bootloader auf das Board geladen werden, um Platz für den Sketch zu ermöglichen. Mehr dazu siehe: http://fpv-community.de/showthread.php?23494-Sketch-Size-amp-32u4
Zur Kommunikation mit anderen Bauteilen oder dem PC stehen ein Mini-B USB-Anschluss und ein I²C Bus zur Verfügung.
ATmega328p: ist der früher am häufigsten eingesetzte (und leider heute immer noch oft gekaufte) µC (z.B. am ProMini). Er wird auch heute noch auf vielen FCs eingebaut. Der ATmega328p verfügt nur über 6 Hardware-PWM Ausgänge mit 8 Bit Auflösung, es können zwei weitere Ausgänge mit Software-PWM belegt werden, was eine Steuerung eines Octocopters zulässt. Aufgrund der 8-Bit PWM macht der Einsatz von SimonK geflashten Reglern keinen Sinn, da diese bei 8 Bit genauso funktionieren wie jeder herkömmliche China-Regler (der Unterschie ist, dass SimonK Regler auch 11 Bit PWM unterstützen).
Es werden hier verschiedene Flight Controller aufgezählt, die aus heutiger Sicht (23.03.2013) am besten für den Copterbau geeignet sind.
Flyduino MEGA: ist ein hochwertiger FC, basierend auf dem ATmega 2560. Dieser FC ist ideal für einen Kamera-Octocopter/Hexacopter. Es werden sämtliche Empfängertypen unterstürtzt (Spectrum Satellite, Summensignal). Prinzipiell kann dieser FC alles, was die Software hergibt. Es sind jedoch keine Sensoren auf dem Board integriert, diese müssen über den I²C Bus angeschlossen werden. Zum Programmieren wird ein FDTI Adapter benötigt, der an den dafür vorgesehenen Anschlüsse angesteckt werden muss (Details siehe FDTI). Das Flyduino MEGA ist bei flyduino.net erhältllich.
Crius AIO V2.0: basiert ebenfalls auf dem ATmega 2560 und ist, wie es der Name schon sagt, ein All In One Board. Es verfügt über dieselben Möglichkeiten wie das Flyduino MEGA (Octo+Kamera). Es ist ein MPU6050 Gyro+ACC, ein HMC5883L Magnetometer und ein MS5611 Barometer auf dem Board verlötet, da dass man keine externen Sensoren verlöten muss. Dies ist vor allem für Anfänger ein großer Vorteil. Das Cruis verfügt über einen Micro-USB Anschluss und einen on-board FDTI Converter (kein externer FDTI erforderlich). Das Crius AIO V2.0 ist bei rctimer.com erhältlich.
Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0: ist die Hobbyking Kopie vom Crius AIO V2.0, es verfügt über dieselben technischen Daten/Sensoren. Erhältlich bei hobbyking.com.
MultiWii PRO Flight Controller w/MTK GPS Module: ebenfalls auf dem ATmega2560 basierend und von den Möglichkeiten gleich dem Crius. Viele Leute fliegen mit diesem Board, jedoch sind sowohl Gyro als auch ACC nicht mehr dem aktuellen Standard entsprechend. Es wird ein GPS Modul mitgeliefert, was insgesamt immer noch zu einem guten Preis/Leistungsverhältnis führt (wenn man diesen FC kauft, kann man anstatt des ITG3200 Gyros+BMA180ACC eine externe MPU6050 an den I²C Bus hängen, dann ist das Ganze auch top ausgestattet incl. GPS). Dennoch bringt es ein Crius o.ä. mit GPS Modul mehr (meiner Meinung nach).
Erhältlich bei hobbyking.com
Flyduino NanoWii: es ist trotz seiner geringen Größe eine vollwertige Multicoptersteuerung auf Basis des ATmega32u4. Es verfügt über 6 hochauflösende PWM Ausgänge, kann jedoch auch einen Octocopter ansteuerun ACHTUNG: die 11 Bit PWM steht nur auf den Motorausgängen 1-6 zur Verfügung, bei einem Octo ist 11 Bit PWM daher NICHT möglich. Es hat einen on-board Mini-B USB Anschluss (also kein externer FDTI Adapter notwendig). Wie oben erwähnt, kann es bei diesem Board zu Speicherplatzproblemen kommen.
Bereits auf dem Board integriert ist ein MPU6050 Gyro+ACC, ein Baro/MAG/GPS kann über den I²C Bus angeschlossen werden.
Das NanoWii eignet sich gut für Anfänger und kleine Copter, da es bereits Gyro+ACC on-board hat und nur noch die ESCs+Empfänger angeschlossen werden müssen. Für die Programmierung müssen teilweise die Treiber heruntergeladen werden, ansonsten ist das NanoWii Plug & Play.
Das NanoWii ist bei Flyduino.net erhältlich.
MultiWii NanoWii ATmega32U4 Micro Flight Controller USB/GYRO/ACC: Die Kopie des NanoWii von HK. Selbe Daten, alles gleich. Erhältlich bei hobbyking.com
Flyduino MW32: verfügt als so ziemlich erstes Board über eine 32 Bit CPU (alle anderen Boards haben eine 8 Bit CPU). Das Board schafft ähnlich dem NanoWii einen Hexacopter anzusteuern. Ich weiß nicht, ob der µC 11 Bit PWM schafft, daher kann nicht gesagt werden, ob SimonK Regler angesteuert werden können. Das MW32 verfügt über ein MPU6050 Gyro+ACC, ein MS5611 Baro und ein HMC5883 Magnetometer sowie über einen on-board Mini-B USB Anschluss.
Da es recht kompliziert in Betrieb zu nehmen ist, sollten Anfänger das NanoWii oder einen anderen FC wählen. Das MW32 ist ebenfalls bei Flyduino.net erhältlich.
DroFly MultiWii FC: ist ein auf dem ATmega32u4 basierender FC von DroTek. Er hat die selben Spezifikationen wie das NanoWii (11 Bit PWM für Motor 1-6, Mini-B USB, ….), verfügt jedoch im Gegensatz zum NanoWii über eine 10DOF IMU, das heißt, es ist ein MPU6050 Gyro+ACC, ein MS5611 Baro und ein HMC5883 Magnetometer auf dem Board verlötet.
Gut geeignet für Anfänger, die gerne sämtliche Sensoren benützen möchten, erhältlich bei DroTek.fr
MultiWii MicroWii ATmega32U4 Flight Controller USB/BARO/ACC/MAG: ist ein auf dem ATmega32u4 basierener FC von Hobbyking. ER ist nahezu baugleich mit dem DroFly MultiWii FC, selben Sensoren, Steuermöglichkeiten usw. .
Sollte jemand ohnehin bei HK bestellen, sollte er diesen FC nehmen, da man sich dadurch das Bestellen bei DroTek erspart. Qualitativ und leistungsmäßig dürften beide Boards gleichwertig sein.
Erhältlich bei hobbyking.com
Manche der FCs unterstützen eine direkte LiPo-Überwachung (ohne einem extra anzuschließenden Buzzer). Nähe Details, Anschlussbelegung und Schaltplan siehe Sonstiges, Tips+Tricks.
Kommunikation mit dem PC:
Um den FC programmieren zu können, muss eine Schnittstelle zum PC vorhanden sein. Um über den USB Anschluss gesendete Daten für den Microcontroller verwertbar zu machen ist ein USB to UART (oder FDTI Adapter) nötig. Dieser wandelt die Befehle vom PC für den Microcontroller um. Es müssen nur die Treiber installiert werden, dann kann einfach der FC mit einem Kabel mit dem PC verbunden werden. Die Treiber können hier heruntergeladen werden: http://www.ftdichip.com/FTDrivers.htm. Dies ist jetzt nicht alzu wichtig, wird bei der Programmierung nochmal erklärt. Es ist nur daran zu denken, einen FTDI Adapter zu kaufen, wenn das Board einen erfordert.
Händler:
Die verschiedenen Sensoren sind mittlerweile fast überall zu bekommen. Da die Sensoren vermehrt direkt auf der Flight Controller Platine verlötet werden sind einzelne Sensorboards meist nur noch als Zusatz für On-Board Sensoren zu kaufen.
Die hier aufgeführten Händler sind die verlässlichsten/bekanntesten Händler, in Wirklichkeit gibt es noch wesentlich mehr.
http://www.drotek.fr/shop/en/
DroTek ist ein europäischer Händler mit Sitz in Frankreich. Er wurde durch seine günstigen Preise (in China gibt es die Sensoren noch billiger, jedoch mit Versand und Zoll kommts aufs selbe) und die hervorragende Qualität der Produkt bekannt. Mittlerweile erhält man neben Sensoren auch noch FC, Spannungsregler, ESCs und vieles mehr.
http://flyduino.net/
Ist der vermutlich bekannteste Online-Händler mit Sitz in Deutschland. Neben Sensoren bietet Flyduino sämtliche Bauteile für Multicopter an. Auch Flyduino steht für höchste Qualität und guten Service.
http://www.stefansliposhop.de/liposhop/
SLS vertreibt alles zum Thema Akkus. SLS-Akkus sind so ziemlich die besten Akkus die es gibt. Sie sind hochqualitativ und haben genau die technischen Daten, die angeben sind (bei den China-Akkus, auch von HK, ist das so eine Sache, z.B.: da steht 30C drauf, bei Tests liefert der Akku max. 20C, Für den Anfang sind China-Akkus mehr als ausreichend, wer aber wirklich professionelle Geräte bauen will, setzt besser auf SLS-Akkus). Preislich liegt SLS nur knapp über den China-Preisen, qualitativ aber meilenweit voraus: die Akkus kommen säuberlich verpackt und perfekt balanciert an, mit diesen Akkus gibt es keine Probleme.
Anmerkung: SLS-Akkus werden ohne Anschlussstecker geliefert, des weiteren befinden sich an den Akkus andere Balancerstecker und zwar JST-XH anstatt der üblichen EHR-Stecker, man braucht also noch einen Adapter von JST-XH auf EHR.
http://www.rctimer.com/
http://www.hobbyking.com/hobbyking/store/index.asp
Hobbyking und RC Timer sind vermutlich die bekanntesten asiatischen Händler. Sie stehen für konkurrenzlos niedrige Preise jedoch auch schwankende Qualität. Jedoch gibt es sämtliche Teile für den Modellbau und vieles mehr zu kleinsten Preisen. TIPP: Kundenrezessionen lesen, dann weiß man eh, wovon man die Finger lassen sollte.
Motoren oder ESCs lassen sich ohne weitere Probleme bestellen, jedoch muss man bei den LiPo-Akkus aufpassen, manchmal spielt der Zoll nicht mit und man darf dann bei der nächsten Zollstelle antanzen und nett fragen, ob man seine Akkus bekommt. Die Abhilfe bietet das deutsche Warenhaus von Hobbyking.
Mittlerweile erhält man die Sensoren/FCs auch bei eBay oder Amazon, jedoch würde ich gerade Anfängern raten, die Bauteile bei so wenig wie Händlern wie möglich zu bestellen.
Bus-Systeme
Die Sensoren können mit einem Bus-System (Ein Bus ist ein Leitungssystem mit zugehörigen Steuerungskomponenten, das zum Austausch von Daten und/oder Energie zwischen Hardware-Komponenten dient.) mit dem Flight Controller kommunizieren. Es werden prinzipiell zwei Bus-Systeme im Modellbau eingesetzt:
Serial Peripheral Interface (kurz SPI)
SPI ist ein synchroner serieller Datenbus, mit dem digitale Schaltungen nach dem Master-Slave-Prinzip miteinander verbunden werden können.
• Drei gemeinsame Leitungen, an denen jeder Teilnehmer angeschlossen ist:
SDO (Serial Data Out) bzw. MISO oder SOMI (Master in, Slave out)
Wird benutzt, wenn der Master Daten vom Slave empfangen soll. Zum Beispiel wenn der Lagesensor (wird als Slave betrieben) die aktuellen Positionswerte an den FC (ist der Master) übermittelt.
SDI (Serial Data In) bzw. MOSI oder SIMO (Master out, Slave in)
Wird benutzt, wenn der Slave Daten vom Master empfangen soll
SCK (Serial Clock) bzw. SCLK, wird vom Master ausgegeben
Gibt den Takt vor. Bei jedem Takt kann ein Bit übertragen werden (das Bit wird auf die Datenleitung MISO/MOSI angelegt und mit der steigenden Taktflanke vom anderen Teilnehmer übernommen).
• Eine oder mehrere mit logisch-0 aktive Chip-Select-Leitungen, welche alle vom Master gesteuert werden und von denen je eine Leitung pro Slave vorgesehen ist.
• Will der Master mit einem Bus-Teilnehmer kommunizieren, zieht er die entsprechende Leitung auf 0. Damit weiß der Teilnehmer, dass er angesprochen wird.
Diese Leitung ist auch der große Nachteil von SPI, da für jeden Teilnehmer eine eigene Leitung benötigt wird (bei 500 Geräten macht das 500 extra Leitungen!!) Dieses Problem behebt der IC Bus, siehe unten.
I²C
Der I2C-Bus (I2C = IIC = Inter-Integrated-Circuit) wurde von der Firma Philips für die Kommunikation zwischen einzelnen Schaltkreisen innerhalb eines Gerätes entwickelt.
Beim I2C-Bus handelt es sich um eine synchrone serielle 2-Drahtverbindung zwischen einem Master und einer beliebigen Anzahl Slaves. Auf der einen Leitung (SCL) wird der Takt übertragen, die andere Leitung (SDA) dient der Übertragung der Daten. Die Daten können vom Controller zum Slave laufen (schreiben), oder aber auch vom Slave zum Master (lesen). Der Takt wird dabei aber immer vom Master erzeugt.
I²C ist als Master-Slave-Bus konzipiert. Ein Datentransfer wird immer durch einen Master initiiert; der über eine Adresse angesprochene Slave reagiert darauf. Dazu zieht der Master die SCL Leitung auf Low und schickt dann die Adresse des gewünschten Bauteils auf die SDA Leitung. Außerdem wird dem Slave mitgeteilt, ob geschrieben oder gelesen werden soll.
Der Vorteil des I²C-Busses ist, dass an nur 2 Leitungen nahezu unberenzt viele Geräte angehängt werden können.
Im MultiWii-Bereich kommt fast ausschließlich dieser Bus zum Einsatz. Die Sensoren werden einfach parallel an dem Bus angeschlossen, siehe unten. Es gibt 2 standardisierte Taktraten: 100kHz und 400kHz. Wer nicht mit dem originalen WiiMotionPlus (kurz: WMP) fliegt, sollte 400kHz einstellen, mehr siehe Programmierung.
Da wie oben erklärt sowohl 3,3V als auch 5V als Versorgungsspannungen im Modellbau vorkommen, kann es passieren, dass der FC mit 5V läuft und der Sensor mit 3,3V. Um denoch miteinander kommunizieren zu können, müssen die Signalpegel vereinheitlicht werden. Dies geschieht durch:
• Interne Pullups: Sind sie aktiviert, liegen auf der Datenleitung 5V, was für die meisten Sensoren schon eine zu hohe Spannung ist.
• Externe Pullups: Gibt es keine internen Pull Ups, werden am Board externe Widerstände verlötet. Dadurch liegen auf der Datenleitung 3,3V an, was für die Sensoren eine verträgliche Spannung und den Microcontroller noch ein ausreichend starkes Signal ist.
• Logic Level Converter: Ein LLC ist die sicherste aber von der Schaltung her aufwändigste Möglichkeit. Dieser wandelt den Spannungspegel von 5V auf für Sensoren verträgliche 3,3V um.
ESC, SimonK Firmware
Motorregler oder ESC (engl. Electronic Speed Controller), werden benötigt, um die Energie des Akkus dosiert an den Motor zu leiten. Dies geschieht typischerweise durch Pulsweitenmodulation, d.h. der Akku wird in einem festen Takt (20 bis 100kHz) auf den Motor geschaltet. Bei Vollgas ist der Schalter während des gesamten Zyklus eingeschaltet, bei Halbgas 50% der Zykluszeit. In jedem Fall legt der Regler die volle Eingangsspannung an den Motor an. Für die Kaufentscheidung des Reglers ist unter anderem seine maximale Belastbarkeit in Ampere (A) wichtig. Diese Belastbarkeit sollte im normalen Betrieb des Modells nicht überschritten werden (mehr siehe Bauteildimensionierung). Die für Multicopter benötigten Brushless Regler (BL-Regler) erzeugen des Weiteren einen dreipahsigen Drehstrom, um die Brushless Motoren steuern zu können. Sie haben 2 Akkukabel, 3 Motorkabel und einen Stecker, der an den FC angesteckt wird. Die meisten der Serien-ESCs können mit einer Programmierkarte programmiert werden. Es können z.B. das Anlaufverhalten des Motors geändert oder der standardmäßig (leider) eingeschaltete Unterspannungsschutz deaktiviert werden. WICHTIG: den Unterspannungsschutz IMMER DEAKTIVIEREN. Die Funktion des Unterspannungsschutzes ist die, dass bei niedriger Akkuspannung der ESC aufhört, Strom an den Motor zu leiten, damit der Akku nicht tiefentladen und damit kaputt wird. Dies ist jedoch komplett hirnrissig, da so der gesamte Multicopter aus mehreren hundert Metern Höhe abstürzt. Es ist der gesamte Rahmen (=Frame), die Motoren und was weiß ich nicht noch alles kaputt, aber Hauptsache der Akku ist nicht tiefentladen. Eine nette Funktion für Segelflieger, für Multicopter aber tötlich. Um dennoch bei fast leerem Akku gewarnt zu werden, wird ein LiPo Warner empfohlen. Dieser hat entweder superhelle LEDs oder einen Buzzer (im Idealfall beides). Er wird an den Balancer-Anschluss des Akkus angeschlossen und beginnt zu blinken / piepen, sobald die Zellspannung des Akkus unter einen gewissen Wert fällt. Sehr zu empfehlen ist hier der LiPo-Warner von Flyduino, der extrem laut piept, sodass alle im Umkreis von 10km wissen, dass der Akku leer ist. Dies ist wichtig, damit man es auch bemerkt, wenn der Copter etwas weiter entfernt ist. Link: http://flyduino.net/1S-8S-Dual-Speaker-Lipo-Alarm-8S-Voltage-Tester-Lipo-Checker
Aufbau eines ESCs:
Es gibt die Möglichkeit, den ESC zu flashen und eine andere Firmware draufzuspielen. Da die meisten ESCs aus Asien usw. meist vollkommen Multicoper untauglich sind, wird das FLashen in letzter Zeit immer populärer. Die modifizierte Software heißt SimonK und ist gratis im Internet herunterladbar. Die Vorteile eines geflashten ESCs sind folgende:
• Ein SimonK-ESC verarbeitet das 490kHz-PWM-Signal von der Flugsteuerung locker, was ein normaler „Serien-ESC“ nicht schafft (die schaffen das nicht und steigen irgendwann aus).
• Die meisten der „Serien-ESCs“ steuern den Motor mit 8kHz an, der geflashte ESC hingegen mit 18kHz. Dadurch entfällt das nervige Sirren/Pfeifen der Motoren und es kommt zu einem lineareren, präziseren Regelverhalten (der ESC sagt dem Motor 18000-mal in der Sekunde, was er tun soll, der Serien-ESC nur 8000-mal).
• Die Serien-ESCs haben 125 Stellschritte (d.h. zwischen Vollgas und min. Drehzahl gibt es 125 Schritte, in denen die Drehzahl stufenweise (1/125) erhöht wird), ein geflashter SimonK-ESC hat 800 Stellschritte. Um diese Funktion nutzen zu können, muss der FC jedoch mit einem ATmega 2560 oder einem ATmega32u4 arbeiten, da diese 11 Bit PWM unterstützen (siehe oben).
Vorsicht: nach dem Flashen kann die Programmierkarte NICHT mehr verwendet werden. Dies spielt aber keine Rolle, da in der SimonK-Firmware die wichtigsten Einstellungen enthalten sind (z.B. der Unterspannungsschutz ist deaktiviert, ..).
Es gibt bereits geflashte Regler zu kaufen, diese sind teilweiße jedoch viel teurer als China-Regler und der einzige Unterschied ist die Firmware. Das Flashen selbst geht recht schnell und auch ohne Probleme (das schafft man auch als Anfänger). Prinzipiell ist jeder Regler flashbar. Man kann sich also einen China-Regler kaufen und nach 10 min ist er ein hochwertiger und vollkommen Muticopter-tauglicher SimonK-ESC. Eine super Anleitung gibt’s hier: http://www.rc-heli-fan.org/quadrocopter-co-f255/howto-esc-regler-flashen-t92521.html
BL-Heli-Firmware:
ist eine weitere Software zum Flashen von ESCs. Ursprünglich wurde sie für Helikopter entwickelt, miittlerweile werden auch MultiCopter unterstützt. Diese Software bietet viele Einstellungsmöglichkeiten, die Grundeinstellungen werden wie bei SimonK bereits voreingestellt. Im Gegensatz zur SimonK Software kommt die BL-Heli Software bei reglern mit SiLabsChips zum Einsatz. Nähere Details siehe: https://github.com/bitdump/BLHeli
Ein Dokument mit allen Flashbaren Reglern, der benötigten Pinbelegung zum Flashen und welche Software für den jeweiligen Regler empfohlen wird ist hier zu finden: https://docs.google.com/spreadsheet/ccc?key=0AhR02IDNb7_MdEhfVjk3MkRHVzhKdjU1YzdBQkZZRlE#gid=0
Akku:
Ein Akku dient als transportable Energieversorgung. Es gibt prinzipiell zwei Einsatzgebiete für Akkus im Multicoper-Bereich: zur Senderversorgung und zur Versorgung des Antriebs+Empfänger. Früher wurde für die Empfängerversorgung ein zusätzlicher Akku benötigt, der heutzutage aufgrund der BECs wegfällt (der Emfpänger wird von z.B. einem ESC mitversorgt).
Es gibt viele verschiedene Akkutypen: Blei (Pb), Nickel-Metall-Hydrid (NiMH), Nickel-Cadmium (NiCd), Lithium-Ionen (LiIo), Lithium-Polymer (LiPo), …
Jeder Akku-Typ hat seine Vor- und Nachteile, es werden hier nur die wichtigsten erklärt:
Nickel-Metall-Hydrid: haben ähnliche Eigenschaften wie ein Nickel-Cadmium-Akku. Seit dem Verbot von NiCd-Akkus wird immer öfters auf NiMH-Akkus zurückgegriffen.
NiMH-Akkus sind relativ Temperatuunempfindlich, haben einen niedrigen Innenwiderstand (d.h. die können hohe Ströme liefern, ohne dass die Spannung einbrichht) und können sehr schnell aufgeladen werden.
Nachteil ist eine hohe Selbstentladungsrate (bis zu 30%/Monat) und die starke Empfindlichkeit gegen Tiefentladung (ist die Zelle tiefentladen, kann man sie wegwerfen)
Dieser Akku-Typ wird bei Modellautos häufig als Motorversorger eingesetzt, im Multicopter-Bereich wird dieser Typ aufgrund seines Gewichtes nicht als Flugakku sondern nur als Senderakku (in der Fernbedienung) eingesetzt.
Lithium-Polymer: Diese Akkus haben eine extrem hohe Leistungsdichte, die alle anderen Akkutechnologien weit übertreffen. Sie können sehr hohe Ströme liefern und bieten trotzdem eine lange Flugzeit. Tiefentladung verkürzt die Lebensdauer dea Akkus, ruiniert diesen (bis zu einem gewissen Grad) aber nicht komplett.
LiPos zeichnen sich durch eine während der Entladung im Flug sehr konstante Spannungslage aus, wobei die Spannung zum Schluss rasch einbricht, was im Extremfall nicht nur einen bloßen Leistungsverlust zur Folge hat, der dringend zur Landung auffordert, sondern auch ein Abschalten aller Motoren durch einen Reset der Flight Control wegen Unterspannung bewirkt. Der Unterspannungspiepser muss schon sehr genau eingestellt sein, um nicht zu spät und nicht zu früh zu piepsen, was im Wechsel von unterschiedlichen Akkus und Lastgewichten (Kamera) vom Piloten oft vernachlässigt wird.
Besonders, wenn man Nickel-Akkus mit ihrem sanften Spannungsgefälle gewöhnt ist, ist in dieser Hinsicht Vorsicht geboten. Gegen Flugende hin sollten deshalb Vollgasschübe nur mehr bedingt gegeben werden.
Unten abgebildet ist die Entladekurve eines LiPo-Akkus. Anhand eines 3S Akkus wird ein Entladezyklus des Akkus beschrieben werden.
Anhang anzeigen 60732
Ein voll aufgeladener 3S Akku hat 12,6V (4,2V pro Zelle), diese Spannung sinkt gleich nach dem Anstecken auf ca. 11,1V, also die Nennspannung des Akkus ab (3,7V pro Zelle), diese Spannung bleibt dann beinahe die ganze Lebensdauer lang konstant. Ganz am Ende sackt die Spannung dann urplötzlich ab, die Spannung sollte aber nie unter 3,3V pro Zelle (bei 3S: 9,9V) absinken. Da der Spannungsabfall extrem schnell erfolgt, sollte ein Akkuwarner benutzt werden und dieser sollte spätestens bei 3,6V das erste Mal anschlagen, damit noch genügend Zeit zum Landen bleibt. Sinkt die Zellenspannung unter 3V ab, so ist die Zelle defekt und bläht sich auf. Dann sollte der Akku nicht länger benutzt werden, da akute Explosions/Brandgefahr besteht.
Nachteil: LiPos sind sehr empfindlich auf mechanische Beanspruchung, d.h. sie dürfen NIE mit scharfen Kanten oder Spitzen in Berührung kommen. Auch können diese Akkuzellen bei Überladung abbrennen/explodieren (und ein LiPo Brand ist nichts, was man gern im Zimmer hat). Mal einfach bei Youtube „LiPo exploding“ eingeben, dann weis man, was gemeint ist:
http://www.youtube.com/watch?v=CbD12lx2GUg
(interessant ab min 1:20). Innerhalb des Akkus sind mehrere Zellen in Serie geschaltet, um die Spannung zu erhöhen. Daher wird zm Laden von LiPos ein Balancer-Ladegerät benötigt, dass dafür sorgt, dass alle Zellen dieselbe Spannung haben.
LiPos sind die Standard Flugakkus, je nach Coptergröße normalerweise zwischen 2 und 4 Zellen.
Coptervarianten
Bei dem Multiwii-Copter kann man aus vielen verschiedenen Konfigurationen eine aussuchen. Bei der aktuellen MultiWii-Version 2.2 stehen folgende Varianten zur Verfügung. WICHTIG: Die schematischen Darstellungen der Copter sind für Atmega 2560-CPUs, welche im Arduino MEGA und allen darauf basierenden FCs (z.B. CRIUS AIOP V2,...) zum Einsatz kommen. Die Bilder dienen nur der Darstellung der Drehrichtungen, die Anschlussbelegung kann sich von anderen FCs unterscheiden (näheres siehe im Datenblatt des jeweiligen FCs).
• BI: bekannt aus dem Avatar Film, bei dem sämtliche Kampfhelikopter Bi-Copter sind. Dieser besteht aus zwei gegengleich drehenden Motoren, die jeweils von einem Servo geschwenkt werden. Dies ist nötig, um z.B. vorwärts oder rückwerts zu fliegen.
• TRI: besteht aus drei Motoren, bei denen jeweils zwei die gleiche Drehrichtung haben und der dritte von einem Servo geschwenkt werden kann.
• QUADP: wird auch „QUAD +“ genannt. Besteht aus vier Motoren, jeweils zwei haben die gleiche Drehrichtung). Diese Konfiguration hat einen Motor ganz vorne (Flugrichtung VORNE ist in Richtung dieses Motors) und sieht aus wie ein Plus, daher der Name.
• QUADX: Im Gegensatz zu QAUDP hat diese Variante 2 Motoren vorne (Flugrichtung VORNE liegt zwischen den beiden Frontmotoren). Diese Variante bietet den Vorteil, dass bei Kameraflügen kein Motor im Bild ist.
• Y4: ebenfalls vier Motoren, jedoch das Aussehen eines Tricopters (im Gegensatz zum Tricopter ist kein Servo zum Schwenken des Auslegers nötig) befinden sich zwei vorne (wie bei QUADX), die anderen beiden sind jedoch untereinander am selben Ausleger. Dies sieht aus wie ein Y (wobei am längeren Ausleger 2 Motoren montiert sind).
• Y6: ist sechsmotorig und in Prinzip ein doppelter Tricopter, jedoch ohne den Schwenk-Servo. Der Rahmen gleicht einem Tricopter, jedoch werden an einem Ausleger zwei Motoren untereinander montiert.
• HEX6: ein „normaler“ Hexacopter mit sechs Auslegern, mit einem Motor als Spitze (siehe QUADP)
• HEX6X: wie HEX6, jedoch mit zwei Spitzen-Motoren, siehe QuadX
• HEX6H: ist eine neue Variante, in der jeweils 3 Motoren in einer Reihe angeordnet sind (da diese Variante neu und eher selten ist gibt es keine wirklichen schematischen Darstellungen, daher ist nicht bekannt für welchen Prozessor diese Pinbelegung stimmt (vermutlich ebenfalls ATmega2560), für nähere Informationen bitte im Datenblatt/Manual des jeweiligen FC nachlesen)
• OCTOFLATP: Copter mit 8 Motoren, P-Konfiguration
• OCTOFLATX: Copter mit 8 Motoren, X-Konfiguration
• OCTOX8: 8 Motoren, ein doppelter QUADX
• GIMBAL: ein 2-Achsen Servo Gimbal zur Kamerastabilisierung inclusive Kameraauslöser. Dies ist kein eigener Copter-Typ, da aber sehr oft Kameras an den Copter gehängt werden soll das Gimbal hier auch erwähnt werden. Es gehört nicht zur Ausstattung eines Anfängers und wird deshalb nicht weiter erklärt werden.
Des weiteren stehen einige Helikopter und Nurflügelkonfigurationen zur Auswahl (dies ist jedoch nicht der eigentliche Sinn hinter der Multiwii-Software, daher werden diese nicht näher erklärt).
Bauteildimensionierung
Zuerst muss man sich darüber Gedanken machen, was der Copter eigentlich können soll. Diese Entscheidung wirkt sich auf die gesamte Bauteilauswahl aus. Man kann seinen Copter sehr klein bauen, sodass er sehr schnell fliegt und auch für Kunststücke tauglich ist. Oder man baut einen Kameraträger. Dieser muss etwas größer sein, oft ein Hexacopter, um ein ordentliches Gewicht tragen zu können. Für einen Anfänger ist ein etwas größerer Quadrocopter (ca. 50cm) sehr gut geeignet. Damit kann man sowohl das Fliegen üben als auch eine Kamera dranhängen.
Es soll hier ein Quadrocpter mit ca. 50cm Durchmesser und mit genügend Tragkraft für eine leichte Kamera dimensioniert werden. Als Rahmen kann man entweder einen fertigen Rahmen kaufen, denn man nur noch zusammenschrauben muss, oder man baut einen eigenen. Man sollte nicht davor zurückschrecken, einen eigenen Rahmen zu bauen. Mit ein paar Alu-Profilen aus dem Baumarkt lassen sich ganz schöne Rahmen bauen (weitere Details folgen).
Als nächstes wird ein Flight-Controller gewählt:
Hierbei ist zu beachten, bei welchen Händlern man bestellt. Wenn man z.B. ohnehin bei Hobbyking bestellt, dann kann man den FC auch dort kaufen und man spart sich das Bestellen bei z.B. Flyduino.
Da die Motoren, Akkus, ESCs und viele Zubehörteile (die gerade ein Anfänger braucht und sicher nicht zuhause hat) auch bei Hobbyking bestellt werden (ist nicht bindend, man kann bestellen wo man will, nur in dieser Anleitung kommen die Teile eben von HK) wird hier nicht das NanoWii von Flyduino eingesetzt sondern das MicroWii von Hobbyking. Dieses Board bietet weiters den Vorteil, dass sämtliche Sensoren auf dem Board enthalten sind und sich ein Anfänger nicht um deren Anlöten kümmern muss. Link: http://www.hobbyking.com/hobbyking/...ga32U4_Flight_Controller_USB_BARO_ACC_MAG.htm
Der oben genannte FC arbeitet mit einem 32u4 Prozessor, wodurch es zu Problemen bei der Nutzung von GPS kommen kann (siehe oben, Prozessortypen). Falls trotzdem GPS genutzt werden soll, empfielt es sich, ein Board mit dem stärkeren und größeren ATmeag 2560 zu wählen. Dieses hier ist baugleich mit dem CRIUS AIO PRO V2 von RC Timer und eignet sich für jeden Coptertypen sowie sämtliche Ausstattung: http://www.hobbyking.com/hobbyking/...light_Controller_w_FTDI_ATmega_2560_V2_0.html
Nun müssen die Motoren und ESCs gewählt werden:
Da der Copter auch eine Kamera tragen können soll, wird ein etwas stärkerer Motor gewählt: http://www.hobbyking.com/hobbyking/store/__17345__NTM_Prop_Drive_Series_28_26A_1200kv_250w.html . NTM Motoren sind sehr gute, billige Motoren. Ich habe 11 von denen für meinen Octocopter bestellt, die laufen alle perfekt rund und vibrieren nicht. Prinipiell gilt: wer hochpräzise Motoren sucht, sollte sich besser in Europa umschauen (Robby Roxxy oder Tiger T-Motoren). Für einen Anfänger sind China-Motoren auf alle Fälle ausreichend, da sie teilweise annähernd die selbe Qualität haben wie europäische und viel weniger kosten. Wichtig: in vielen Fällen werden Erweiterungspacks mit z.B. einem Propellermitnehmer benötigt. Hier ist ein Erweiterungspack mit der anschraubbaren Welle und der Motorbefestigung erforderlich: http://www.hobbyking.com/hobbyking/store/__16719__NTM_Prop_Drive_28_Series_Accessory_Pack.html
Weiters solle sicherheitshalber eine Reservewelle und ein oder zwei zusätzliche Motoren bestellt werden (gilt auch für ESCs und Propeller)
http://www.hobbyking.com/hobbyking/store/__21302__NTM_Prop_Drive_2826_Series_Replacement_Shaft.html
Im Datenblatt des Motors (oder auf der Website) steht, wieviel Strom er maximal verbraucht. Dieser Wert ist für die Wahl des ESCs ausschalggebend.
Passend zum Motor müssen die Propeller gewählt werden. Jeder Motor hat eine KV Angabe. Der oben gewählte hat z.B.: 1200kv. Dies ist die Angabe der Umdrehungen pro Volt im Leerlauf (ohne Last = ohne Prop). Dieser Motor dreht bei einem Volt mehr um 1200U/min schneller. Dieser Wert ist für die Wahl der Props wichtig: grundsätzlich gilt: je kleiner der KV Wert, desto größer werden die Props. Für 1200KV sind 8 Zoll (=8“) Props eine gute Wahl. Die Propeller sollen nach Möglichkeit aus Carbon sein, da sie eine viel größere Steifigkeit haben. Da Carbon Props aber ungefähr das 10fache von normalen Plastik-Props kosten und sich das nicht jeder leisten kann/will, reichen für den Anfang auch normale Plastikpropeller. Wichtig: es müssen Props für beide Drehrichtungen (Im/gegen den Uhrzeigersinn) bestellt werden. Am besten man bestellt sich gleich ein paar Zusatzpaare, da am Anfang mit Sicherheit einige Props zu Bruch gehen.
Bei einem Propeller wird immer der Durchmesser in Zoll (“) und die Steigung angegeben. Was der Durchmesser ist, muss ja wohl nicht weiter erklärt werden. Die Steigung entspricht der Strecke, die ein Propeller während einer Umdrehung in einem festen Material zurücklegen würde. Der für dieses Setup benutzte Prop hat diese Bezeichnung: 8x4,5 (auch 8045). Das bedeutet, er hat einen Durchmesser von 8 Zoll und eine Steigung von 4.5 Zoll, d.h. er würde bei einer Drehung in einem festen Material eine Strecke von 4,5 Zoll zurücklegen. Bei dem Bild ist leider eine Schiffsschraube angebildet, das Prinzip ist aber das selbe.
Carbon:
http://www.hobbyking.com/hobbyking/..._Propellers_1pc_Standard_1pc_RH_Rotation.html
Plastik:
http://www.hobbyking.com/hobbyking/...tandard_Rotation_2_pc_RH_Rotation_Green_.html
Die Farbe ist an sich egal, jedoch solle man Props mit zwei unterschiedlichen Farben kaufen, sodass man die Flugrichtung des Copters kennzeichnen kann (z.B. die vorderen beiden Props Grün, die hinteren beiden Rot)
ESC:
Bei dem ESC wird immer der maximal schaltbare Strom angegeben (wenn mehr fliest, rauchst der ESC ab!!) und die Zellenanzahl des zu benutzenden LiPos. Jetzt sucht man sich beim Händler je nach dem maximalen Strom und der Akkuzellen einen geeigneten ESC. Der hier gewählte Motor hat eine maximale Stromaufnahme von 18A, das heißt ein 20A ESC ist ausreichend. Da der ESC ohnehin geflasht werden sollte, sind die Programmierfunktionen erstmal egal, eine Programmierkarte wird in diesem Fall ebenfalls nicht benötigt. http://www.hobbyking.com/hobbyking/store/__15202__Hobby_King_20A_ESC_3A_UBEC.html
Vorteil bei diesem ESC: er verfügt über ein UBEC (Vergleich zu BEC: weniger Abwärme) und er kann auch mit 4S arbeiten (das heißt, man kann später ohne Schwierigkeiten/Hardwareumbau auf einen 4S Akku wechseln, da auch der Motor 4S unterstützt).
Wenn man einen falschen Akku wählt dann funktioniert nichts oder wenn man Pech hat ruiniert man sich eine Menge. Deshalb muss der Akku genau auf das gewählte/vorhandene Motor+ESC Setup abgestimmt werden. Dazu müssen erstmal die Angaben auf dem Akku erklärt werden (wobei X immer für die Variable steht, dieser Wert ist von Akku zu Akku unterschiedlich):
XXXXmAh (milli Ampere Stunden), z.B.: 2500mAh: Dies ist die Kapazität des Akkus. Sie besagt, dass man über einen Zeitraum von einer Stunde genau 2500mA = 2,5A entnehmen kann, bevor der Akku leer ist. Bei einer höheren Kapazität kann man bei gleichbleibender Leistung länger Leistung aus dem Akku entnehmen (z.B.: man benötigt konstant 2,5A und hat einen 5000 mAh Akku --> man könnte eine Stunde lang 5A entnehmen. Da man aber nur 2,5A benötigt (die Hälfte von 5A), kann man diese über 2 Stunden entnehmen).
X S, z.B.: 3S: Dies ist die Zellenangabe (S steht für Zellen). Da eine LiPo Zelle nur 3,7V liefert, die FCs und Motoren aber mehr brauchen, werden in einem Akkupack mehrere Zellen von gleicher Kapazität in Serie geschaltet, was die Spannung erhöht. Ein 2 Zellen Akku hat 7,4V (3,7V + 3,7V) Spannung, der oben genannte 3S Akku hat demnach 11,1V.
Mehr Zellen erhöhen bei gleich bleibendem Stromverbrauch die Leistung, da sich die Leistung wie folgt berechnet: P = U * I: wird die Spannung (U) erhöht und der Strom (I) bleibt gleich, dann erhöht sich die Leistung (P)
XX C, z.B.: 20C: C steht für dem maximalen Entladestrom. 1C ist der Entladestrom, den man eine Stunde lang entnehmen kann, bevor der Akku leer ist. Das heißt das bei einem 2500mAh Akku ein C gleich 2,5A ist. Die Angabe von 20C bedeutet, dass man den Akku mit maximal 20*1C = 20*2,5A = 50A belasten kann, ohne ihn dauerhaft zu beschädigen. Diese Angabe stammt vom Hersteller, man sollte sie nicht unbedingt ausreizen.
Normalerweise wird zuerst der Motor gewählt und im Anschluss ein passender Akku. Im Datenblatt des Motors / auf der Website des Händlers steht, wieviel Strom der Motor maximal verbraucht. Der oben gewählte Motor hat eine maximale Stromaufnahme von 18A. Da ein Quadrocopter vier Motoren hat, muss dieser Wert mit vier multipliziert werden (max. Stromaufnahme * Anzahl der Motoren). Dies ergibt den Strom, der bei Vollgas benötigt wird. In diesem Fall ergibt das 72A. Da der gewählte Akku aber maximal nur 50A liefern kann, ist dieser für diesen Copter zu klein. Es kann jetzt entweder die Kapazität oder die C-Rate erhöht werden. Es gilt zu beachten: Je mehr Kapazität der Akku hat, desto schwerer wird er. Durch den größeren Akku wird der Copter wiederum schwerer, wodurch die Motoren höher drehen müssen, um den Copter in die Luft zu heben. Dadurch dass die Motoren schneller drehen verbrauchen sie auch mehr Strom, wodurch der Akku schneller leer wird. So heben sich die Effekte von einem größeren Akku und dem größeren Gesamtgewicht gegenseitig auf und die Flugdauer bleibt ungefähr die gleiche +-1min. Das selbe gilt bei der Parallelschaltung mehrerer Akkus: mehr Akkus = höhere Kapazität = mehr Gewicht = höhere Motordrehzahl benötigt = höherer Stromverbrauch = selbe Flugdauer trotz mehrerer Akkus.
Es muss das optimale Verhältnis zwischen Gewicht und Kapazität gefunden werden. Dafür gibt es keine Regel, das muss jeder selbst entscheiden. Für einen Anfänger ist vielleicht ein leichterer Copter von Vorteil, da sie leichter zu bewegen sind.
Hier wird ein 3S Akku mit einer Kapazität von 3000mAh und 25C Dauerentladestrom gewählt: Max. Strom = 3A*25 = 75A, für diesen Copter ausreichend (Akkugewicht: 230g). Link: http://www.hobbyking.com/hobbyking/store/__11919__Turnigy_nano_tech_3000mah_3S_25_50C_Lipo_Pack.html
WICHTIG: Was fast alle bei der Akkudimensionierung vergessen ist, dass der maximale entladestrom immer von der momentanen Kapazität abhängig ist, und diese im Flug sinkt. Sind anstatt der 3000mAh nur noch 1500mAh im Akku, so ist der maximale Entladestrom = 1,5A*25 = 37,5A und wäre somit nicht mehr hoch genug, um die Motoren bei voller Leistung zu versorgen. Dieser Fakt ist für einen Anfänger (und den Großteil aller anderen Modellbauer) unbedeutend, da der Copter nur selten mit Vollgas geflogen wird. Zumeist schwebt man oder steigt langsam in die Höhe, bei all diesen Aufgaben laufen die Motoren deutlich unterhalb ihrer Leistungsgrenze, daher wird der Maximalstrom selten benötigt. Des weiteren haben alle Akkus einen Burst-Entladestrom, der weit über dem Dauerstrom liegt und für ca. 10s entnommen werden darf. Bei dem oben dimensionieren Akku beträgt die Burst-Rate 50C. Dies ergibt bei 1500mAh im Akku max. Strom = 1,5A*50 = 75A und damit mehr als ausreichend um die Motoren zu versorgen. Wird auch der Burst-Entladestrom zu klein um mit Vollgas fliegen zu können sollte man ohnehin bald landen, da die Akkulaufzeit dem Ende zugeht.
Kurz gesagt: Der oben genannte Akku ist ausreichend, da man ohnehin selten mit Vollgas unterwegs ist.
Des Weiteren müssen noch Zusatzteile wie der Programmieradapter für das Board (hier reicht ein Mini-B USB Kabel), ein Adapter zum flashen der ESCs, Kabel, Goldkontaktstecker, Heißschrumpfschläuche und vieles mehr bestellt werden:
http://www.hobbyking.com/hobbyking/store/__68__PolyMax_3_5mm_Gold_Connectors_10_PAIRS_20PC_.html
http://www.hobbyking.com/hobbyking/...0_Connectors_Male_Female_5_pairs_GENUINE.html
http://www.hobbyking.com/hobbyking/store/__27195__Atmel_Atmega_Socket_Firmware_Flashing_Tool.html
http://www.hobbyking.com/hobbyking/store/__5278__Turnigy_5mm_Heat_Shrink_Tube_b_RED_b_1mtr_.html
http://www.hobbyking.com/hobbyking/store/__3833__Turnigy_5mm_Heat_Shrink_Tube_BLACK_1mtr_.html
http://www.hobbyking.com/hobbyking/store/__29652__On_Board_Lipoly_Low_Voltage_Alarm_2s_6s_.html
Es werden möglicherweise noch weitere Bauteile benötigt, diese müssen selbstverständlich mitbestellt werden. Diese Einkaufsliste dient nur als Muster, fehlende Bauteile müssen eventuell bei anderen Händlern bestellt werden.
Multicopter mit Bauteilen aus Europa
Es ist natürlcih auch möglich, den gesamten Multicopter mit Bauteilen aus Europa zu bauen. Dies hat den Vorteil dass man nicht 4 Wochen auf die Bauteile warten mus und keine Zollgebühren anfallen. Außerdem sind europäische Produkte meist qualitativ hochwertiger als aus China. Ein weiterer Vorteil ist, dass man im Falle eines defekts den Händler einfach anschreiben kann, um das Bauteil auszutauschen, was man bei China-Händler nicht immer kann.
Bei Flyduino erhält man fast alle Bauteile für einen Multicopter:
Wer keinen eigenen Rahmen bauen möchte, der kann diesen heir nehmen, ein solider, simpler Rahmen, bei dem man auch die Arme nach einem Crash sehr leicht tauschen kann:
http://flyduino.net/Quadrokopter-Rahmen-Set-25cm-arm
und noch ein Landegestell dazu:
http://flyduino.net/Landegestell-Hoch
Als Motoren kann man die Suppos empfehlen, diese brinden bei max. 12A Verbrauch ca. 800g Schub, ein Motor bringt ca. 800-900g Schub, also ideal für einen Copter von max. 800g (da kann man einen ordentlcihen Quad bauen) und haben dann noch genug Reserven nach oben.
http://flyduino.net/Multikopter-Motor
Zu diesen Motoren braucht man 9-10" Props. Es ist empfehlenswert, die Propeller in 2 verschiedenen Farben zu kaufen sodass man beim Fliegen Vorne erkennen kann. Man montiert eine Farbe an den vorderen Props und die andere Farbe an den hinteren Props, dann erkennt man immer schön, wo vorne ist. Das wären für 9" diese hier: grün
schwarz
Für 10" diese hier:
grün
schwarz
Für den Anfang sollte man beide Größen kaufen, dann kann man selbst testen, welcer Propeller besser zum Copter passt. Außerdem sollten gleich 10-20 Paare gekauft werden, da am Beginn die Props Verschleißware sind.
Als ESCs empfehlen sich bereits auf SimonK-Firmware geflashte 20A ESCs:
http://flyduino.net/Flyduino-NFET-HEXFET-20A-ESC-SimonK-Firmware
Je nach gewünschter Flugdauer und Coptergewicht kann man einen der folgenden Akkus wählen (genaueres zur Dimensionierung siehe oben). Für diese Motoren sind 3S Akkus erforderlich.
Dieser ist klener und für einen von grund auf leichten Copter:
http://flyduino.net/Flyduino-XMania-Lipo-3s-2200-mAh-60c
Dieser ist etwas größer und für schwerere Copter:
http://flyduino.net/Flyduino-XMania-Lipo-3s-2500-mAh-25c
Um im Flug gewarnt zu werden, wenn der Akku leer wird, gibt es diesen LiPo Warner (der ist echt Luxusausstattung mit 2 Lautsprechern und 7-Segmentanzeige):
http://flyduino.net/1S-8S-Dual-Speaker-Lipo-Alarm-8S-Voltage-Tester-Lipo-Checker
Um den LiPo am Copter anzuschließen werden noch XT-60 Stecker benötigt:
http://flyduino.net/XT60-Stecker-und-Buchse
Um dem ganzen Copter ein ordentliches Aussehen zu verpassen empfiehlt es sich, eine Stromverteilerplatine einzubauen:
http://flyduino.net/Flydubution-Stromverteiler-Board
Als FC kann man für einen einfachen Quad ohne Baro, MAG oder GPS das NanoWii wählen:
http://flyduino.net/Multikopter-FC-Multiwii
-------Unterbrechung---------
Dieser FC ist leider nicht mehr käuflich erwerbbar, es wird bereits nach einem Ersatz gesucht, bitte bis zur nächsten Aktualisierung der Anleitung warten oder das Naze32 aus Japan bestellen
Wenn man alle Sensoren benutzen möchte oder später auf GPS aufrüsten will, so empfiehlt sich dieses Board:
Das Board hat den Vorteil, einen schnelleren 32Bit Prozessor verbaut zu haben, der auch die komplexe GPS Berechnung durchführen kann.
----------------------------------------
Um das Board schön auf dem Copter zu montieren gibt es Polymer-Distanzbolzen:
http://flyduino.net/Distanzbolzen-10mm-M3-Polyamid
Damit wären alle wichtigen Bauteile genannt, damit man einen ordentlichen Quadrocopter bauen kann. Werkzeuge und Lötkolben werden ebenfalls benötigt, wie auch ein LiPo Ladegerät, alles erhältlich bei Conrad.
Wenn wem Fehler auffallen, bitte in einen Kommentar schreiben, dann werden die Fehler ausgebessert.
Grüße, Moritz
Zuletzt bearbeitet:
















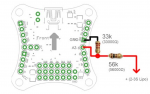
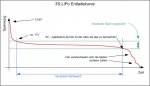



") .
.
