Google Code Seite:
https://code.google.com/p/4esc-by-martinez/
************** technische Daten ************
4ESC V2.0:
max. 4S Eingangsspannung
Dauerstrom pro ESC ca. 20A (der max. Wert muss noch ermittelt werden)
2 lagige PCB
nur n-Kanal MOSFETs (FDMS7660 25A)
MosFETs werden über eine einfache Bootstrapping Schaltung betrieben.
keine BEC
4 pol Molex (PPM 1,2,3,4)
4ESC V3.0:
max. 6S Eingangsspannung
Dauerstrom pro ESC ca. 20A (der max. Wert muss noch ermittelt werden)
4 lagige PCB
nur n-Kanal MOSFETs (FDMS7660 25A)
sehr schnelle MosFet Treiber (MCP14700)
BEC 5V ca. 400mA
6 pol Molex (GND, 5V, PPM 1,2,3,4)
optional I2C
*****************************************
Hallo,
vor 6 Monaten haben ich angefangen einen 4fach ESC für ein Quadrocopter zu entwerfen.
Ziel wird es einen vollen 4fach ESC mit max 6S und ca. 20A pro Regler auf 50x50mm zu bekommen!
Ich weiß, viele denken wenn einer kaputt geht sind alle kaputt. Ich denke aber solange die PCB ok ist kann man das reparieren.
Es sollte ein ESC mit SimonK Firmware werden also ein Atmega8 muss drauf, natürlich sollen nur N-Kanal MosFets drauf kommen.
Ich habe mich für den Hersteller Fairchild entschieden, das Modell FDMS7660 hat super Werte.
Datenblatt https://www.fairchildsemi.com/ds/FD/FDMS7660.pdf
Max rDS(on) = 2.8 mΩ at VGS = 10 V, ID = 25 A
Max rDS(on) = 3.5 mΩ at VGS = 4.5 V, ID = 19 A
Vds 30V
ID Continuous = 25A
ID Pulsed = 150A
Da ich immer recht zufrieden mit den Blueserie 20A war, habe ich mich an diesen Regler orientiert.
Hier habe ich einige Infos her:
http://www.rcgroups.com/forums/showthread.php?t=1401408
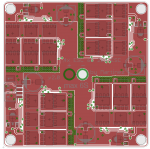
Mein erstes Layout V1.0 war noch recht chaotisch. Es musste schnell gehen") Ich wollte sehen ob es funktioniert.
Ich wollte sehen ob es funktioniert.
BILD TOP
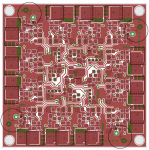
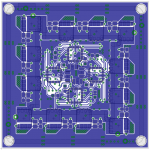
BILD BOT
Ende Juli habe ich sie fertig gehabt.

Pro:
- Es funktioniert
Contra:
- Schlechte Stromverteilung auf der PCB, keine Sternförmige Hochstromleiterbahn.
- Atmega8 im MLF32 Gehäuse
- Layout sieht nicht gut aus
Der 4ESC v1.0 ist jetzt im Cleancopter (mein iCopter ) eingebaut, ca. 5 Akkuladungen hat er bis jetzt ohne Probleme durchgehalten.Leider hatte ich zu diesen Zeitpunkt kein anderen Copter zur Verfügung, der Cleancopter ist ziemlich der ungeeignetste Copter den man zum Testen nehmen kann! Ich komm an nichts ran!!!
Die Zwischenzeit habe ich genutzt um mein Layout komplett zu überarbeiten.
Version 2.0 ist fertig!!!
Fortschritte:
- Atemga8 im TQFP32 Gehäuse
- Sternförmige Hochstromleiterbahn
- Zentrale Einspeisung
- Alle MosFets auf einer Seite
- Molex 4Pol Stiftleiste für die 4 ESC-Signale
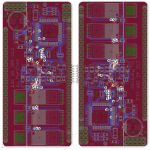
Schaltplan

Layout
Eagle Files
Anhang anzeigen ESC v2.0 4fach.zip
Nachteil, ich musste für jeden ESC einen extra 5V Regler spendieren, nur so konnte ich bei 2 Lagen bleiben.
Die Leiterplatten sind auch schon fertig und drei 4ESC sind bestückt und programmiert.
Fotos



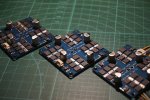

Ein 4ESC habe ich Nico99 zum Testen gegeben. Mit einen spiele ich und einer wäre noch frei!
Wenn jemand Erfahrung und Lust hat mir beim Testen und Optimieren zu helfen. MELDEN!!!
Ich habe im Moment noch 6 PCBs, bei Interesse könnte ich diese auch noch bestücken. Die Bauteile sollte ich, wenn gewünscht in ca. 1 Wochen haben.
Achtung Hobbyprojekt
Zurück zum 4ESC.
Der Stromverbrauch im „Standby“ ist viel höher als erwartet. Ich hätte nie gedacht das die Atmega8 so viel Verlustleistung haben.
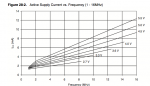
Ich habe jetzt im Datenblatt (Seite 245, Bild 119) gefunden das der Atmega8 bei 16Mhz ca. 20mA verbraucht.
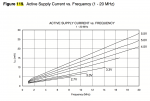
Real sind es wohl ca. 25mA, macht zusammen 100mA, bei 5V sind das 500mW und bei 3S nochmal ca. 1W an den Liniarreglern.
Kann das jemand bestätigen (Atmega8 bei 16Mhz 20mA), oder habe ich hier ein Fehler?!
Insgesamt braucht der 4ESC ohne Motoren 160mA bei 12V, das sind also nochmal 60mA oben drauf….
Diese 15mAh pro ESC kommen von den Widerständen R3/R4/R5, bei 12V und 2k2 macht das 5,45mA/ESC.
Hier mal ein Ausschnitt von den Stromlaufplan.

Nico99 hat schon die Idee gehabt, ein 47k Widerstand an die Basis des Transistors gegen GND zu bestücken. Dadurch sollte er besser abschalten.
Ich werde das mal testen.
Nochmal zu den R3/R4/R5, bei 4S sollte das noch gehen (7,6mA), aber bei 6S wird das im Standby zu viel. Der Widerstand würde viel mehr Leistung verbraten als er darf (max 100mW). Bei 6S 28V wären das 176mW.
Lösung: zwei 1k1 Ohm Widerstände in Reihe?!
Hier mal eine Messung mit mein Oszi am R3 in Betrieb.
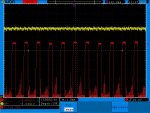
Man sieht "lange" Pausen mit 0V und die Highs mit knapp 50V durch die Bootstrapping Schaltung.
Eine weitere Überlegung wäre richtige MOSFET Treiber zu nutzen.
Das wäre dann wohl ein sauberer 4ESC_Pro
Der IR2101 wird bei so manchen ESC benutzt, er braucht aber als VCC min. 10V was eine 2. Stromversorgung bedeutet
Der IR2301 funktioniert schon an 5V Beide sind aber im SOIC8 Gehäuse sehr groß! Der wird vom Platz sehr schwer bis unmöglich.
Dann habe ich noch den MCP14700 gefunden.
Der läuft mit 5V und ihn gibt es in den super kleinen 3x3 DFN Gehäuse.
Das Problem von beiden ist der Preis.
IR2301 ab 10 Stück 2,17 EUR (HBE Shop) und beim Mouser ab 10 Stück 1,53 EUR
MCP14700 ab 10 Stück 1,94 EUR (HBE Shop) und beim Mouser ab 10 Stück 1,53 EUR
Der MCP14700 wäre also der bessere.
ABER bei den 4ESC wären das 12x 1,53 EUR = 18,36 EUR mehr Kosten. Die Einsparung von den BC817 und die 2 Widerstände sind ja fast null.
Gestern habe ich den 4ESC mal mit ein 5010er 350KV Motor testet http://www.rctimer.com/product_575.html
28V (6S) Trottle 50%
Der Motor läuft sehr gut! Ich hatte zwar nur einen 9x4,7 Latte dran…
Auf jeden Fall bliebt der 4ESC bei leichter Kühlung durch den Propeller kalt!
Was haltet ihr davon?
Hat ihr Ideen / Lösungen / Vorschläge?
Wer will sich als „Tester“ opfern ?
Über eine Diskussion würde ich mich sehr freuen!
Viele Grüße
Martinez
PS: Ich hab noch was......
Vor 2 Wochen habe ich noch ein normalen ESC by Martinez fertig gelayoutet, also der gleiche Schaltplan nur eben nur ein ESC auf einen einzelnen 24x50mm PCB (einseitig) Die PCB sollten auch ca. in 2 Wochen kommen....
Update: 02.10.2013
Die PCBs für den normalen 4S ESC sind heute gekommen.

Update 20.09. 2013 - Zusammenfassung:
Die Version 2.0 funktioniert nur bis 4S, evtl. muss die Kapazität der VCC Elkos erhöht werden.
Der 4ESC braucht für über 4S MosFET Treiber, entweder die MCP14700 (+5V, bis max. 8S), oder IR210x (benötigt zusätzlich 12V, VCC begrenzt durch den MosFET)
Eine größere Version mit 8S (oder mehr) 5V SBEC, 12V SBEC, 6 bis 8 ESCs, bis 40A/ESC wäre denkbar.
Ich würde aber erst einmal bei der kleineren bleiben und diese fertig machen wollen.
Jörgs (Helijoy) erstes Feedback zur V2.0 Link plus erste Messung Link
- PWM-Signale verlaufen sehr nah am Rand, Gefahr beim Crash
- VCC Anschluss lieber auf Pads ändern, Anschlussleitung kann flach verlötet werden
- Motorpads sehr nah an den Fets (für über 20A Motorkabel zu klein), Motorpads sollte besser an den Rand der PCB sein
Anmerkungen zum Schaltplan von Jörg (jreise): Link
- AVCC mit 100nF abblocken und mit 10µH an 5V
- RESET mit 10k, besser 18k nach +5V, 100nF nach GND, oder komplett frei lassen
- Die Beschaltung von AREF hängt von der SW ab. Wenn dort die interne Referenz von 2,56V oder AVCC als Referenz ausgewählt ist, dann nur 100nF nach GND und ansonsten offen lassen. Wenn externe Referenz ausgewählt ist, dann diese dort anschliessen.
Das Layout v2.0 (max. 4S) wird um Treiber (MCP14700, oder IR2101), Status LEDs (low current) und VCC Lötpads erweitert. Das wird erst einmal v2.1
inc File von imcoref: Link
Tata, hier wäre er: die rote LED kann an PB1 des Atmels....
(evtl. noch grün und, oder gelb)
Prototypen vom Klempnertommy
http://fpv-community.de/showthread.php?34317-4ESC-by-Martinez-max-6S&p=444878&viewfull=1#post444878
http://fpv-community.de/showthread.php?34317-4ESC-by-Martinez-max-6S&p=444919&viewfull=1#post444919
Update 02.10.2013
Das Layout habe ich noch einmal komplett neu aufgebaut.
Nach meinen Vorgaben der Pinbelegung hat mir imcoref eine neue inc File für die SimonK Firmware erstellt. Vielen Dank!!!
Mit der erstellten inc File konnte ich die Atmega 8 nach meinen Vorstellungen "benutzen". Das hat extremen Platz und Durchkontaktierungen gespart.
Als 5V Stromversorgung kommt ein LM2675 zum Einsatz, der Stepdown-Regler hat einen max. Ausgangsstrom von 1A. Dadurch kann man sogar noch den Flight-Controller und den Empfänger mit 5V versorgen. Weiterer Vorteil, es wird so gut wie keine Energie in Wärme umgewandelt. Hier geht´s zu einen Testaufbau mit der V2.0 Link.
Die 5V des Stepdown-Regler können über den 6 poligen Molex Buchse (4 Motorsignal, GND und 5V) direkt den Flightcontroller und den Empfänger versorgen.
Ein 3 pol Molex für I2C ist auch mit dabei.
Die Analog Supply Voltage (Avcc) der Atmegas bekommt ein zentrales RC Glied zur Entstörung der analogen Spannung.
Aref wird per 100nF auf GND geschaltet. (Hier ist ein abschließender Betrag von Jörg Link Vielen Dank!)
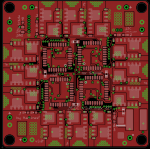
Die VCC Pads konnten durch die 4 lagige PCB nach außen wandern, auch die Motorpads sind jetzt alle außen,auf beiden Seiten mit Pads versehen, dadurch kann man z.B. geschlitze Goldkontaktstecker perfekt und sicheranlöten.
Das Layout habe ich seit ca. 3 Tagen fertig, in den letzten 2 Tagen habe ich es optimiert. Man findet echt noch sau viel was man verbessern kann....
Hier nochmal die Daten:
4ESC auf 50x50mm (ohne seitliche Elkos), Lochraster 45x45mm
4 lagige PCB
max 6S VCC
Dauerstrom ca. 20A-25A (mal sehen wie sich die Temperatur entwickelt)
7x Elko THT Pads (VCC)
Zentrale +5V 1A Powersupply (Stepdown)
Molex 6 Pol Buchse (4x ESC, +5V/GND für FC und RC)
Vorbereitung für i2c (3 Pol Molex Buchse mit GND, SDA, SCL)
+5V Status LED
je ESC 2 LEDs für Status und Warnung
2 gegenüberliegende VCC GND Pads auf der Ober- und Unterseite, dadurch könnte man auf 2 4ESC übereinander stecken.
Da das Layout wieder komplett neu ist nenne ich es mal Version 3.0
Bei den nächsten Projekt muss ich mal bei v0.1 Beta anfangen und nicht bei v1.0
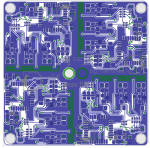
So sieht es jetzt aus:
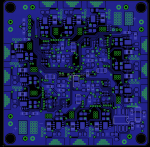 Die 2. Lage ist VCC und die 3. Lage GND.
Die 2. Lage ist VCC und die 3. Lage GND.
Update 26.10.2013
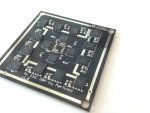
Gestern sind die v3.0 gekommen

Update 04.11.2013
Mit den 4ESC v3.0 geht es prächtig voran!
Die PCBs sind okay, die ersten 3 Muster sind bestückt.


Die Software wurde auch entsprechend angepasst.
Der 4ESC v3.0 läuft!!!!
Vielen Dank noch einmal an den User Incoref!!! Ohne ihn hätte ich das nicht hinbekommen!!!!Hier kommt noch ein kleines Video zum Testlauf der v3.0.
(Der 4ESC wird zum Test über einen kleinen Adapter kontaktiert)
http://www.youtube.com/watch?v=BxCdHvwmLks&feature=youtu.be
In den nächsten Tägen wird die Software noch optimiert...
Das Gewicht beträgt ohne Kabel, aber mit Elkos (in Summe sind das 1050µF ) ca. 20g.
Anhang anzeigen 74273
Viele Grüße
Martinez
UPDATE 20.11.2013
Hier mal wieder eine kleine Zusammenfassung der letzten Aktivitäten und Infos.
Martinez
https://code.google.com/p/4esc-by-martinez/
************** technische Daten ************
4ESC V2.0:
max. 4S Eingangsspannung
Dauerstrom pro ESC ca. 20A (der max. Wert muss noch ermittelt werden)
2 lagige PCB
nur n-Kanal MOSFETs (FDMS7660 25A)
MosFETs werden über eine einfache Bootstrapping Schaltung betrieben.
keine BEC
4 pol Molex (PPM 1,2,3,4)
4ESC V3.0:
max. 6S Eingangsspannung
Dauerstrom pro ESC ca. 20A (der max. Wert muss noch ermittelt werden)
4 lagige PCB
nur n-Kanal MOSFETs (FDMS7660 25A)
sehr schnelle MosFet Treiber (MCP14700)
BEC 5V ca. 400mA
6 pol Molex (GND, 5V, PPM 1,2,3,4)
optional I2C
*****************************************
Hallo,
vor 6 Monaten haben ich angefangen einen 4fach ESC für ein Quadrocopter zu entwerfen.
Ziel wird es einen vollen 4fach ESC mit max 6S und ca. 20A pro Regler auf 50x50mm zu bekommen!
Ich weiß, viele denken wenn einer kaputt geht sind alle kaputt. Ich denke aber solange die PCB ok ist kann man das reparieren.
Es sollte ein ESC mit SimonK Firmware werden also ein Atmega8 muss drauf, natürlich sollen nur N-Kanal MosFets drauf kommen.
Ich habe mich für den Hersteller Fairchild entschieden, das Modell FDMS7660 hat super Werte.
Datenblatt https://www.fairchildsemi.com/ds/FD/FDMS7660.pdf
Max rDS(on) = 2.8 mΩ at VGS = 10 V, ID = 25 A
Max rDS(on) = 3.5 mΩ at VGS = 4.5 V, ID = 19 A
Vds 30V
ID Continuous = 25A
ID Pulsed = 150A
Da ich immer recht zufrieden mit den Blueserie 20A war, habe ich mich an diesen Regler orientiert.
Hier habe ich einige Infos her:
http://www.rcgroups.com/forums/showthread.php?t=1401408
Mein erstes Layout V1.0 war noch recht chaotisch. Es musste schnell gehen
Ich wollte sehen ob es funktioniert.BILD TOP
BILD BOT
Ende Juli habe ich sie fertig gehabt.
Pro:
- Es funktioniert
Contra:
- Schlechte Stromverteilung auf der PCB, keine Sternförmige Hochstromleiterbahn.
- Atmega8 im MLF32 Gehäuse
- Layout sieht nicht gut aus
Der 4ESC v1.0 ist jetzt im Cleancopter (mein iCopter
) eingebaut, ca. 5 Akkuladungen hat er bis jetzt ohne Probleme durchgehalten.Leider hatte ich zu diesen Zeitpunkt kein anderen Copter zur Verfügung, der Cleancopter ist ziemlich der ungeeignetste Copter den man zum Testen nehmen kann! Ich komm an nichts ran!!!Die Zwischenzeit habe ich genutzt um mein Layout komplett zu überarbeiten.
Version 2.0 ist fertig!!!
Fortschritte:
- Atemga8 im TQFP32 Gehäuse
- Sternförmige Hochstromleiterbahn
- Zentrale Einspeisung
- Alle MosFets auf einer Seite
- Molex 4Pol Stiftleiste für die 4 ESC-Signale
Schaltplan
Layout
Eagle Files
Anhang anzeigen ESC v2.0 4fach.zip
Nachteil, ich musste für jeden ESC einen extra 5V Regler spendieren, nur so konnte ich bei 2 Lagen bleiben.
Die Leiterplatten sind auch schon fertig und drei 4ESC sind bestückt und programmiert.
Fotos
Ein 4ESC habe ich Nico99 zum Testen gegeben. Mit einen spiele ich und einer wäre noch frei!
Wenn jemand Erfahrung und Lust hat mir beim Testen und Optimieren zu helfen. MELDEN!!!
Ich habe im Moment noch 6 PCBs, bei Interesse könnte ich diese auch noch bestücken. Die Bauteile sollte ich, wenn gewünscht in ca. 1 Wochen haben.
Achtung Hobbyprojekt
Zurück zum 4ESC.
Der Stromverbrauch im „Standby“ ist viel höher als erwartet. Ich hätte nie gedacht das die Atmega8 so viel Verlustleistung haben.
Ich habe jetzt im Datenblatt (Seite 245, Bild 119) gefunden das der Atmega8 bei 16Mhz ca. 20mA verbraucht.
Real sind es wohl ca. 25mA, macht zusammen 100mA, bei 5V sind das 500mW und bei 3S nochmal ca. 1W an den Liniarreglern.
Kann das jemand bestätigen (Atmega8 bei 16Mhz 20mA), oder habe ich hier ein Fehler?!
Insgesamt braucht der 4ESC ohne Motoren 160mA bei 12V, das sind also nochmal 60mA oben drauf….
Diese 15mAh pro ESC kommen von den Widerständen R3/R4/R5, bei 12V und 2k2 macht das 5,45mA/ESC.
Hier mal ein Ausschnitt von den Stromlaufplan.
Nico99 hat schon die Idee gehabt, ein 47k Widerstand an die Basis des Transistors gegen GND zu bestücken. Dadurch sollte er besser abschalten.
Ich werde das mal testen.
Nochmal zu den R3/R4/R5, bei 4S sollte das noch gehen (7,6mA), aber bei 6S wird das im Standby zu viel. Der Widerstand würde viel mehr Leistung verbraten als er darf (max 100mW). Bei 6S 28V wären das 176mW.
Lösung: zwei 1k1 Ohm Widerstände in Reihe?!
Hier mal eine Messung mit mein Oszi am R3 in Betrieb.
Man sieht "lange" Pausen mit 0V und die Highs mit knapp 50V durch die Bootstrapping Schaltung.
Eine weitere Überlegung wäre richtige MOSFET Treiber zu nutzen.
Das wäre dann wohl ein sauberer 4ESC_Pro
Der IR2101 wird bei so manchen ESC benutzt, er braucht aber als VCC min. 10V was eine 2. Stromversorgung bedeutet
Der IR2301 funktioniert schon an 5V
Beide sind aber im SOIC8 Gehäuse sehr groß! Der wird vom Platz sehr schwer bis unmöglich.Dann habe ich noch den MCP14700 gefunden.
Der läuft mit 5V und ihn gibt es in den super kleinen 3x3 DFN Gehäuse.
Das Problem von beiden ist der Preis.
IR2301 ab 10 Stück 2,17 EUR (HBE Shop) und beim Mouser ab 10 Stück 1,53 EUR
MCP14700 ab 10 Stück 1,94 EUR (HBE Shop) und beim Mouser ab 10 Stück 1,53 EUR
Der MCP14700 wäre also der bessere.
ABER bei den 4ESC wären das 12x 1,53 EUR = 18,36 EUR mehr Kosten. Die Einsparung von den BC817 und die 2 Widerstände sind ja fast null.
Gestern habe ich den 4ESC mal mit ein 5010er 350KV Motor testet http://www.rctimer.com/product_575.html
28V (6S) Trottle 50%
Der Motor läuft sehr gut! Ich hatte zwar nur einen 9x4,7 Latte dran…
Auf jeden Fall bliebt der 4ESC bei leichter Kühlung durch den Propeller kalt!
Was haltet ihr davon?
Hat ihr Ideen / Lösungen / Vorschläge?
Wer will sich als „Tester“ opfern
?Über eine Diskussion würde ich mich sehr freuen!
Viele Grüße
Martinez
PS: Ich hab noch was......
Vor 2 Wochen habe ich noch ein normalen ESC by Martinez fertig gelayoutet, also der gleiche Schaltplan nur eben nur ein ESC auf einen einzelnen 24x50mm PCB (einseitig)
Die PCB sollten auch ca. in 2 Wochen kommen....
Update: 02.10.2013
Die PCBs für den normalen 4S ESC sind heute gekommen.
Update 20.09. 2013 - Zusammenfassung:
Die Version 2.0 funktioniert nur bis 4S, evtl. muss die Kapazität der VCC Elkos erhöht werden.
Der 4ESC braucht für über 4S MosFET Treiber, entweder die MCP14700 (+5V, bis max. 8S), oder IR210x (benötigt zusätzlich 12V, VCC begrenzt durch den MosFET)
Eine größere Version mit 8S (oder mehr) 5V SBEC, 12V SBEC, 6 bis 8 ESCs, bis 40A/ESC wäre denkbar.
Ich würde aber erst einmal bei der kleineren bleiben und diese fertig machen wollen.
Jörgs (Helijoy) erstes Feedback zur V2.0 Link plus erste Messung Link
- PWM-Signale verlaufen sehr nah am Rand, Gefahr beim Crash
- VCC Anschluss lieber auf Pads ändern, Anschlussleitung kann flach verlötet werden
- Motorpads sehr nah an den Fets (für über 20A Motorkabel zu klein), Motorpads sollte besser an den Rand der PCB sein
Anmerkungen zum Schaltplan von Jörg (jreise): Link
- AVCC mit 100nF abblocken und mit 10µH an 5V
- RESET mit 10k, besser 18k nach +5V, 100nF nach GND, oder komplett frei lassen
- Die Beschaltung von AREF hängt von der SW ab. Wenn dort die interne Referenz von 2,56V oder AVCC als Referenz ausgewählt ist, dann nur 100nF nach GND und ansonsten offen lassen. Wenn externe Referenz ausgewählt ist, dann diese dort anschliessen.
Das Layout v2.0 (max. 4S) wird um Treiber (MCP14700, oder IR2101), Status LEDs (low current) und VCC Lötpads erweitert. Das wird erst einmal v2.1
inc File von imcoref: Link
Tata, hier wäre er: die rote LED kann an PB1 des Atmels....
(evtl. noch grün und, oder gelb)
Prototypen vom Klempnertommy
http://fpv-community.de/showthread.php?34317-4ESC-by-Martinez-max-6S&p=444878&viewfull=1#post444878
http://fpv-community.de/showthread.php?34317-4ESC-by-Martinez-max-6S&p=444919&viewfull=1#post444919
Update 02.10.2013
Das Layout habe ich noch einmal komplett neu aufgebaut.
Nach meinen Vorgaben der Pinbelegung hat mir imcoref eine neue inc File für die SimonK Firmware erstellt. Vielen Dank!!!
Mit der erstellten inc File konnte ich die Atmega 8 nach meinen Vorstellungen "benutzen". Das hat extremen Platz und Durchkontaktierungen gespart.
Als 5V Stromversorgung kommt ein LM2675 zum Einsatz, der Stepdown-Regler hat einen max. Ausgangsstrom von 1A. Dadurch kann man sogar noch den Flight-Controller und den Empfänger mit 5V versorgen. Weiterer Vorteil, es wird so gut wie keine Energie in Wärme umgewandelt. Hier geht´s zu einen Testaufbau mit der V2.0 Link.
Die 5V des Stepdown-Regler können über den 6 poligen Molex Buchse (4 Motorsignal, GND und 5V) direkt den Flightcontroller und den Empfänger versorgen.
Ein 3 pol Molex für I2C ist auch mit dabei.
Die Analog Supply Voltage (Avcc) der Atmegas bekommt ein zentrales RC Glied zur Entstörung der analogen Spannung.
Aref wird per 100nF auf GND geschaltet. (Hier ist ein abschließender Betrag von Jörg Link Vielen Dank!)
Die VCC Pads konnten durch die 4 lagige PCB nach außen wandern, auch die Motorpads sind jetzt alle außen,auf beiden Seiten mit Pads versehen, dadurch kann man z.B. geschlitze Goldkontaktstecker perfekt und sicheranlöten.
Das Layout habe ich seit ca. 3 Tagen fertig, in den letzten 2 Tagen habe ich es optimiert. Man findet echt noch sau viel was man verbessern kann....
Hier nochmal die Daten:
4ESC auf 50x50mm (ohne seitliche Elkos), Lochraster 45x45mm
4 lagige PCB
max 6S VCC
Dauerstrom ca. 20A-25A (mal sehen wie sich die Temperatur entwickelt)
7x Elko THT Pads (VCC)
Zentrale +5V 1A Powersupply (Stepdown)
Molex 6 Pol Buchse (4x ESC, +5V/GND für FC und RC)
Vorbereitung für i2c (3 Pol Molex Buchse mit GND, SDA, SCL)
+5V Status LED
je ESC 2 LEDs für Status und Warnung
2 gegenüberliegende VCC GND Pads auf der Ober- und Unterseite, dadurch könnte man auf 2 4ESC übereinander stecken.
Da das Layout wieder komplett neu ist nenne ich es mal Version 3.0
Bei den nächsten Projekt muss ich mal bei v0.1 Beta anfangen und nicht bei v1.0
So sieht es jetzt aus:
Die 2. Lage ist VCC und die 3. Lage GND.Update 26.10.2013
Gestern sind die v3.0 gekommen
Update 04.11.2013
Mit den 4ESC v3.0 geht es prächtig voran!
Die PCBs sind okay, die ersten 3 Muster sind bestückt.
Die Software wurde auch entsprechend angepasst.
Der 4ESC v3.0 läuft!!!!
Vielen Dank noch einmal an den User Incoref!!! Ohne ihn hätte ich das nicht hinbekommen!!!!
Hier kommt noch ein kleines Video zum Testlauf der v3.0.(Der 4ESC wird zum Test über einen kleinen Adapter kontaktiert)
http://www.youtube.com/watch?v=BxCdHvwmLks&feature=youtu.be
In den nächsten Tägen wird die Software noch optimiert...
Das Gewicht beträgt ohne Kabel, aber mit Elkos (in Summe sind das 1050µF
) ca. 20g.Anhang anzeigen 74273
Viele Grüße
Martinez
UPDATE 20.11.2013
Hier mal wieder eine kleine Zusammenfassung der letzten Aktivitäten und Infos.
- Die Treiber MOSFET Kombi ist sehr schnell, nach einem Low Signal am Atmega8A ist das Gate nach ca. 50ns auf 0V
- Fimware upload per PPM Eingang und USB Linker funktioniert
- Integration in das KKmultiCopter Flashtool ist in Arbeit
- „Aktiver Freilauf“
- Testläufe bei den Testern erfolgreich
- die Effizienz des 4ESC v3 sieht vielversprechend aus
- erfolgreicher Testflug http://fpv-community.de/showthread.php?34317-4ESC-by-Martinez-max-6S&p=483945&viewfull=1#post483945
- Hochpolmotoren haben (noch) Probleme mit der Synchronisation (SimonK Problem) z.B. http://www.rctimer.com/product_811.html
- I2C Anbindung ist gerade im Test
- Test vom Hexacopter LINK
- Test vom Klempnertommy LINK und LINK
- Test vom hornetwl LINK
- Projektseite auf Google Code wurde eröffnet: https://code.google.com/p/4esc-by-martinez/
hier findet ihr die Firmware und bald noch viel mehr…
Martinez
Zuletzt bearbeitet: