Hi Eugen,
Das hatte ich bei mir nicht, der flog schön geradeaus ohne unerwünschtes Gieren. Ist ja eigentlich auch eine Stärke der vielen Motoren. Hast du mal geschaut, ob Deine Props alle gerade sind? Einfach mal ein Lineal / langen Stab / Wasserwaage an die Propellerebene anhalten.
Grüße,
Olli
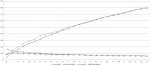
Ps. hab mir die Tage einen kleinen Prüfstand gebaut und gleichläufig und gegenläufig verglichen. Gleichläufig würde ich nicht mehr empfehlen, zumindest nach dem, was da rauskam. Im effizienten Bereich liegt gegenläufig 20% weiter vorne. Muss ich aber nochmal nachprüfen")
Das hatte ich bei mir nicht, der flog schön geradeaus ohne unerwünschtes Gieren. Ist ja eigentlich auch eine Stärke der vielen Motoren. Hast du mal geschaut, ob Deine Props alle gerade sind? Einfach mal ein Lineal / langen Stab / Wasserwaage an die Propellerebene anhalten.
Grüße,
Olli
Ps. hab mir die Tage einen kleinen Prüfstand gebaut und gleichläufig und gegenläufig verglichen. Gleichläufig würde ich nicht mehr empfehlen, zumindest nach dem, was da rauskam. Im effizienten Bereich liegt gegenläufig 20% weiter vorne. Muss ich aber nochmal nachprüfen
Zuletzt bearbeitet: