Hi Stephan,
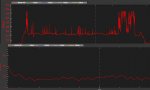
sieht doch ganz gut aus...
ich komme hier leider im Moment nicht weiter, Alt-Hold ist einfach nur noch ne Katastrophe, da geht gar nichts...
habe auch keine Ahnung an welchen Werten ich noch herumschrauben soll... der Witz ist ja...es ging schon mal
(vor Sonar und minim OSD zusammen mit 3dr) der APM ist auch im Gehäuse, Schaumstoff ist auf dem Baro, also soweit alles ok...
sieht doch ganz gut aus...
ich komme hier leider im Moment nicht weiter, Alt-Hold ist einfach nur noch ne Katastrophe, da geht gar nichts...
habe auch keine Ahnung an welchen Werten ich noch herumschrauben soll... der Witz ist ja...es ging schon mal
(vor Sonar und minim OSD zusammen mit 3dr) der APM ist auch im Gehäuse, Schaumstoff ist auf dem Baro, also soweit alles ok...