Bevor du hier alles klein sägst, poste mal bitte eine komplette Liste deiner Parameter aus der CLI. mit "set list" oder so sollte die ausgegeben werden.
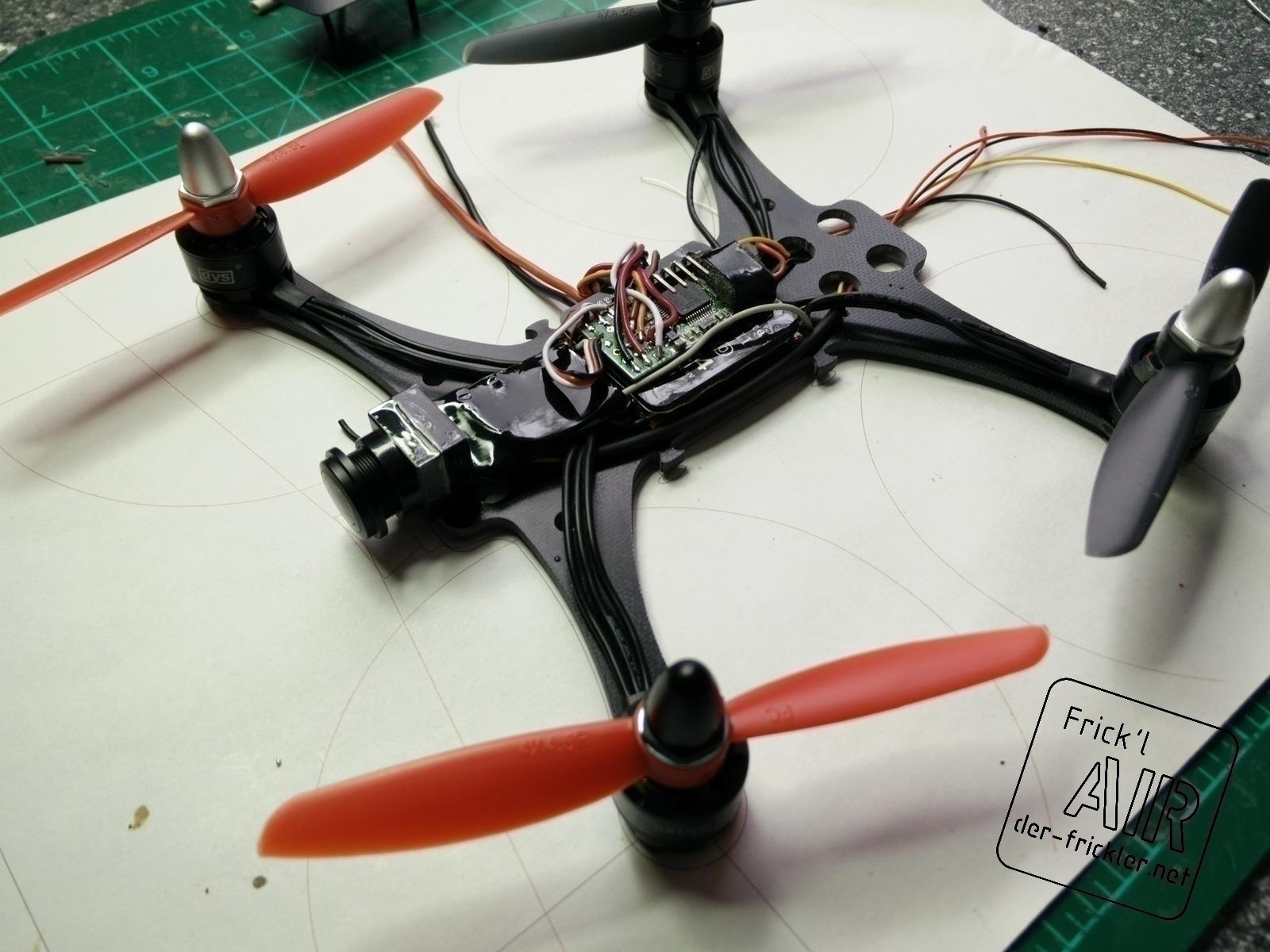
Für die Zukunft würde ich dir empfehlen so einen Kopter aus Einzelteilen zu fräsen. Das ist VIEL billger und auch stabiler. Durch die Verwendung von M2 Schrauben wird es auch nicht zu schwer.
Hab mal ein Bild von einem unserer "kleinen" angehängt. Ein besseres hab ich gerade nicht zur Hand. Das Ding geht ab wie sau!
Videobeweis:
https://www.youtube.com/watch?v=qBjycX-4nkc
Für die Zukunft würde ich dir empfehlen so einen Kopter aus Einzelteilen zu fräsen. Das ist VIEL billger und auch stabiler. Durch die Verwendung von M2 Schrauben wird es auch nicht zu schwer.
Hab mal ein Bild von einem unserer "kleinen" angehängt. Ein besseres hab ich gerade nicht zur Hand. Das Ding geht ab wie sau!
Videobeweis:
https://www.youtube.com/watch?v=qBjycX-4nkc
Anhänge
-
 297,2 KB Aufrufe: 32
297,2 KB Aufrufe: 32
Zuletzt bearbeitet: