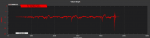
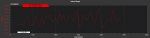
Ja -+3 sagt das Wiki. Hier wird oft eher empfohlen richtung +-1 zu gehen. AccX und AccY sind dabei die unkritischsten Werte, und dienen eher als Indikator für einen schlechten Aufbau. Vibrationen auf der Z Achse hingegen sorgen tatsächlich dafür, dass dein Copter unsauber fliegt, sobald du beispielsweise einen Flugmodus benutzt, der auf Althold basiert (RTL, Loiter, Poshold). Das liegt daran, dass das Barometer zu träge ist, und für feine Änderungen auch die AccZ Werte mit den Barowerten aggregiert werden. Wenn du dann da Vibrationen hast, werden diese Werte verfälscht und deine FC denkt, der Copter steigt oder sinkt und steuert gegen. Da der Copter aber nicht steigt oder sinkt, sondern nur Vibriert wie ein alter Trecker, äußert sich dass dann in einer sehr ungenauen Höhenhaltung bis hin zum trägen auf und ab Schwingen.
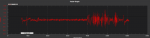
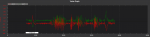
Deine Logs oben sehen aber in Ordnung aus, zeigt mal lieber AccZ
")
Aussagekräftig sind die Logs erst, wenn du damit ein paar minuten fliegst. Auf dem Tisch können Resonanzen oder ähnliches auftreten.