Hallo,
ich hab ein Problem mit meinen APM 2.5.2 mit Arducopter 3.1.
Ich habe im AltHold (und auch im Loiter) Modus ein schnelles pulsieren der Motoren wo ich einfach nicht weiß wie ich das wegbekomme.
Meine Config:
TBS Disco
APM 2.5.2 (rc-timer mit Gehäuse mehrfach unterschiedliche Menge an schwarzen Schaumstoff über dem Baro probiert)
Arducopter 3.1 ( Autotune schon gemacht)
4S ; 30A UBEC Regler mit SimonK geflasht; MT2216 900KV Motoren; aktuell Aeronaut Cam Carbon light Prop 10x5
Bei Windstille und im Loiter Modus ist eigentlich alles OK der Copter schwebt ganz ruhig auf der Stelle, sobald ich mit etwas Geschwindigkeit fliege oder auch etwas Wind vorhanden ist wo der Copter im Loiter ausgleichen muss, hab ich ein recht schnelles pulsieren der Motoren, dann sinkt und steigt der copter auch permanent.
An welchen Parameter könnte ich denn da drehen um das in den Griff zu bekommen??
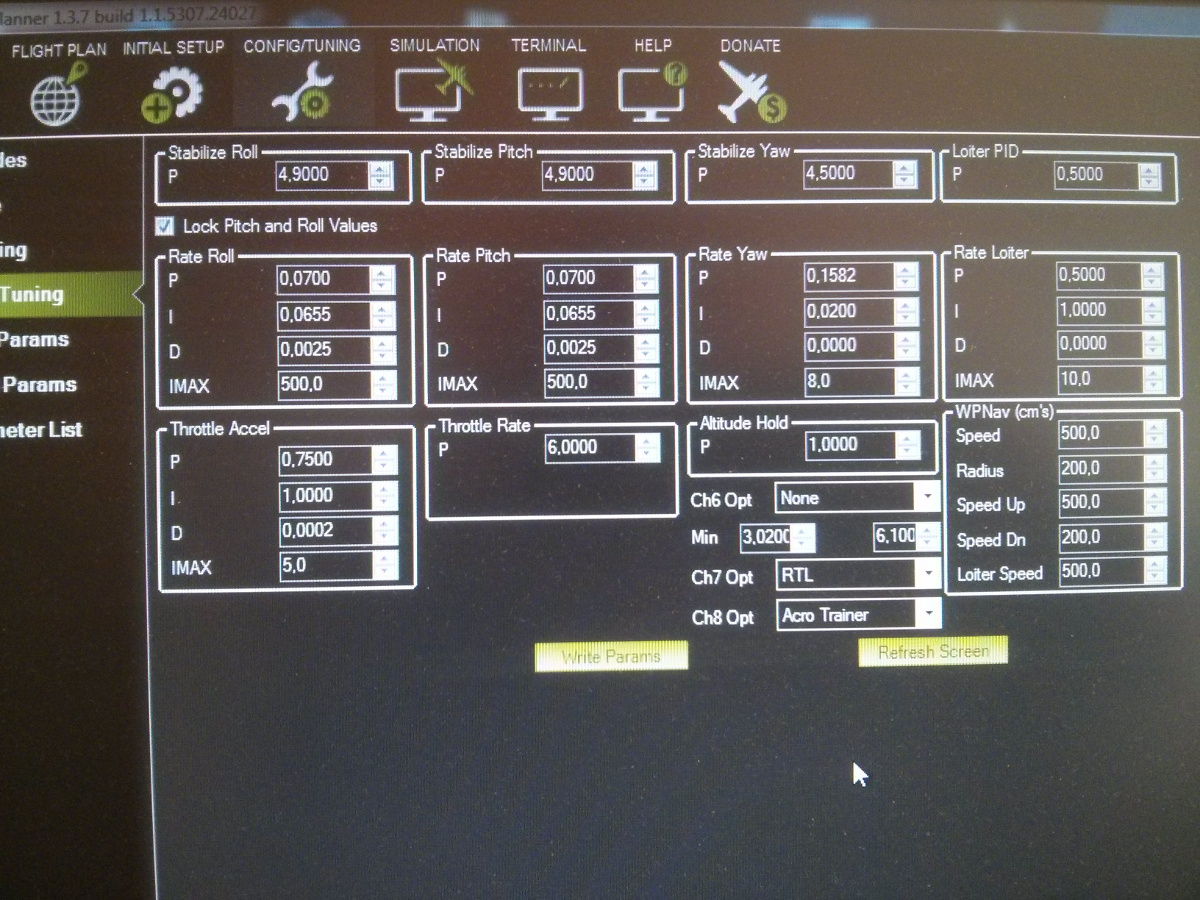
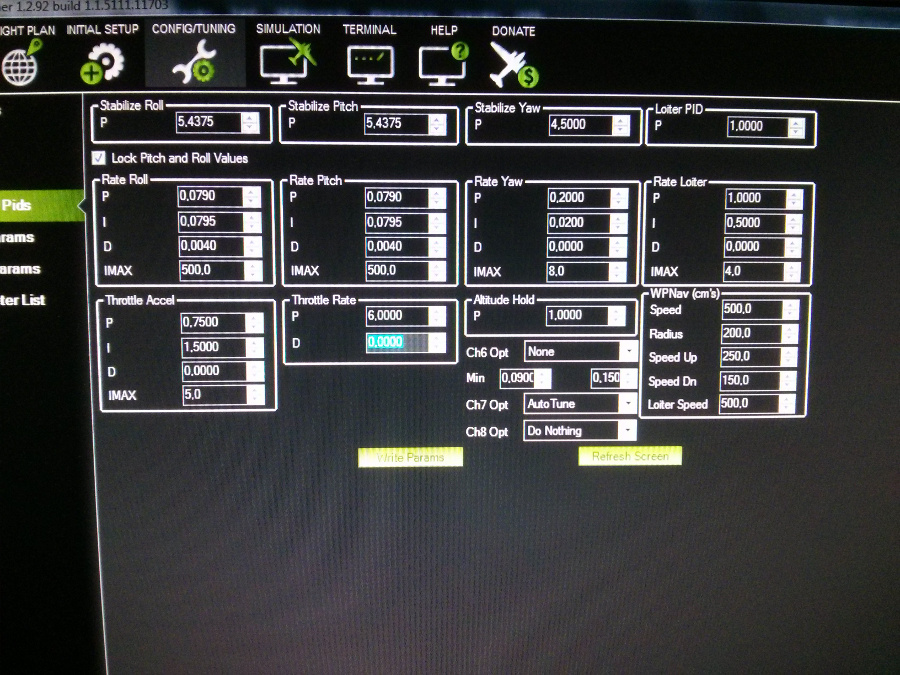
Hier meine Parameter:
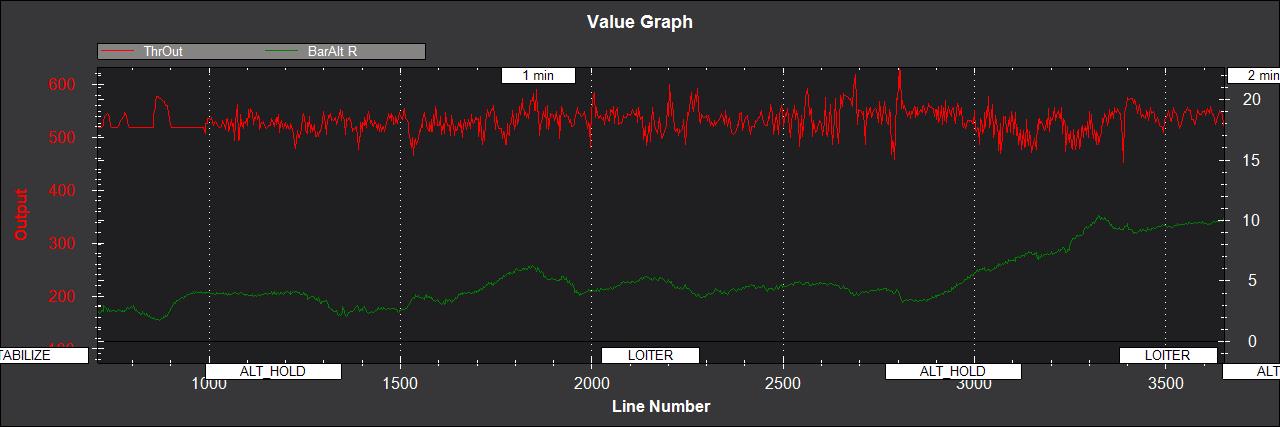
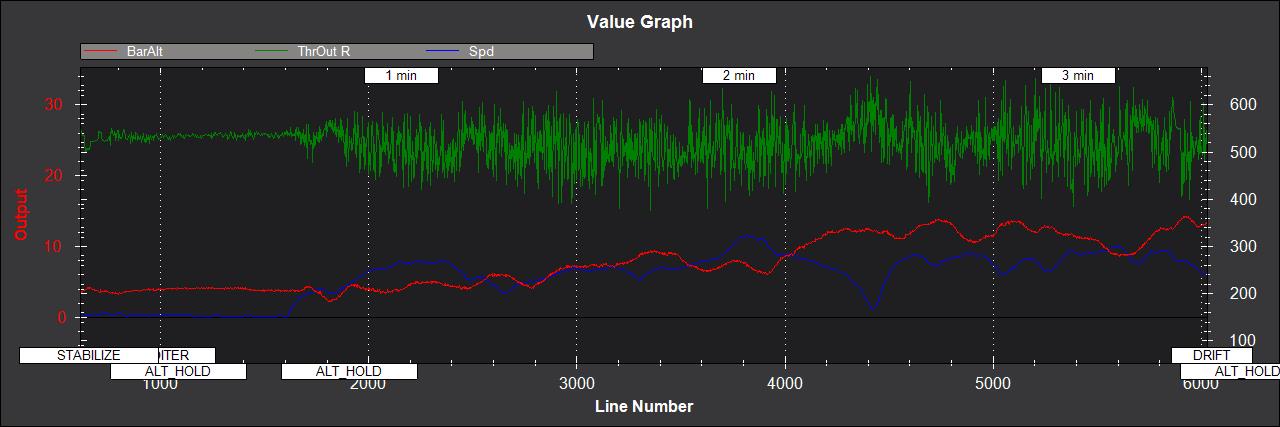
Hier im Log sieht man das pulsieren des Thr_out:
Und hier das dazugehörige Video wo man das pulsieren recht gut hört:
[video=youtube_share;hvUcrDHFt-Q]http://youtu.be/hvUcrDHFt-Q[/video]
Laut: http://copter.ardupilot.com/wiki/altitude-hold-tuning/
""
Parameter: THR_RATE_D is 0.02 by default, but the noise of the Baro sensor can cause issues. If the value is too high you will see bad oscillations or pulsing of the motors. Once the THR_RATE_P value is dialed in, start at 0, and increment slowly. You should see oscillations die down.
""
sollte der THR_RATE_D verringert werden mei pulsieren der Motoren, aber der steht ja schon auf 0
An welchen Parameter könnte ich denn probieren zu verstellen??
mfg Jörg
ich hab ein Problem mit meinen APM 2.5.2 mit Arducopter 3.1.
Ich habe im AltHold (und auch im Loiter) Modus ein schnelles pulsieren der Motoren wo ich einfach nicht weiß wie ich das wegbekomme.
Meine Config:
TBS Disco
APM 2.5.2 (rc-timer mit Gehäuse mehrfach unterschiedliche Menge an schwarzen Schaumstoff über dem Baro probiert)
Arducopter 3.1 ( Autotune schon gemacht)
4S ; 30A UBEC Regler mit SimonK geflasht; MT2216 900KV Motoren; aktuell Aeronaut Cam Carbon light Prop 10x5
Bei Windstille und im Loiter Modus ist eigentlich alles OK der Copter schwebt ganz ruhig auf der Stelle, sobald ich mit etwas Geschwindigkeit fliege oder auch etwas Wind vorhanden ist wo der Copter im Loiter ausgleichen muss, hab ich ein recht schnelles pulsieren der Motoren, dann sinkt und steigt der copter auch permanent.
An welchen Parameter könnte ich denn da drehen um das in den Griff zu bekommen??
Hier meine Parameter:
Hier im Log sieht man das pulsieren des Thr_out:
Und hier das dazugehörige Video wo man das pulsieren recht gut hört:
[video=youtube_share;hvUcrDHFt-Q]http://youtu.be/hvUcrDHFt-Q[/video]
Laut: http://copter.ardupilot.com/wiki/altitude-hold-tuning/
""
Parameter: THR_RATE_D is 0.02 by default, but the noise of the Baro sensor can cause issues. If the value is too high you will see bad oscillations or pulsing of the motors. Once the THR_RATE_P value is dialed in, start at 0, and increment slowly. You should see oscillations die down.
""
sollte der THR_RATE_D verringert werden mei pulsieren der Motoren, aber der steht ja schon auf 0
An welchen Parameter könnte ich denn probieren zu verstellen??
mfg Jörg