
AQ 6.6 r33 FRSKY PPM Aussetzer
- Themenstarter rc-action_de
- Beginndatum
Hey Klasse - meinen Glückwunsch - dann dürfte das bestimmt vielen helfen - *freu* ;-)
ich hatte sogar noch mehr Aussetzer und bin daher stutzig geworden. Der Flug damit sah ein wenig peinlich aus, weil der Copter immer gerne absackte.
Also halten wir nochmal fest, was in solchen Fällen zu tun ist. (Copter sackt im Flug für Sekunden- Bruchteile ab)
1. Conversely, if you are powering the receiver separately from a BEC, ensure that you are not backfeeding positive voltage into the AQ.
1. - die Verbindung zwischen Empfänger und AQ darf bei gebrücktem M14 Lötpad nur über schwarz und orange bzw. weiß erfolgen (das rote Kabel wird dabei "nicht" angeschlossen)
2. - der Empfänger wird über ein externes BEC angeschlossen
Meine Akkus laden gerade ... dann geht es wieder an die PID- Einstellungen.
Viele Grüße
Henry
ich hatte sogar noch mehr Aussetzer und bin daher stutzig geworden. Der Flug damit sah ein wenig peinlich aus, weil der Copter immer gerne absackte.
Also halten wir nochmal fest, was in solchen Fällen zu tun ist. (Copter sackt im Flug für Sekunden- Bruchteile ab)
1. Conversely, if you are powering the receiver separately from a BEC, ensure that you are not backfeeding positive voltage into the AQ.
1. - die Verbindung zwischen Empfänger und AQ darf bei gebrücktem M14 Lötpad nur über schwarz und orange bzw. weiß erfolgen (das rote Kabel wird dabei "nicht" angeschlossen)
2. - der Empfänger wird über ein externes BEC angeschlossen
Meine Akkus laden gerade ... dann geht es wieder an die PID- Einstellungen.
Viele Grüße
Henry
Moin,
bei Multiwii und Naza hatte ich diese Schwierigkeiten noch nie aber evtl. ist dieser Fehler reproduzierbar.
In den meisten Flugreglern sind zumeist mehrere 7805 als BEC verbaut. Diese können sich gerne mal aufschwingen. Ich kann mir gut vorstellen dass das in diesem Fall passiert ist - wer weiß ...
Viele Grüße
Henry
bei Multiwii und Naza hatte ich diese Schwierigkeiten noch nie aber evtl. ist dieser Fehler reproduzierbar.
In den meisten Flugreglern sind zumeist mehrere 7805 als BEC verbaut. Diese können sich gerne mal aufschwingen. Ich kann mir gut vorstellen dass das in diesem Fall passiert ist - wer weiß ...
Viele Grüße
Henry
Hallo Marcus,
das hört sich nicht gut an :-( bei mir hat es geholfen. Ich habe zwar leichte Ticks in den Kurven aber die sieht man nur wenn man man jede Kurve für sich betrachtet. Dabei ist Kanal0 (Gas) nun sauber und auf Nick/ Roll habe ich leichte Haken. Im Flug merkt man es zwar, es ist jedoch nicht unbedingt schlimm.
Merkst du es im Flug oder hast du auch die Kurven einzeln betrachtet ?!
Edit: hier mal ein Onboardvideo. https://vimeo.com/52791328 Hier sieht man die rythmischen Tics. Das hat allerdings nichts mehr mit den Haken von Gestern zu tun.
Viele Grüße
Henry
das hört sich nicht gut an :-( bei mir hat es geholfen. Ich habe zwar leichte Ticks in den Kurven aber die sieht man nur wenn man man jede Kurve für sich betrachtet. Dabei ist Kanal0 (Gas) nun sauber und auf Nick/ Roll habe ich leichte Haken. Im Flug merkt man es zwar, es ist jedoch nicht unbedingt schlimm.
Merkst du es im Flug oder hast du auch die Kurven einzeln betrachtet ?!
Edit: hier mal ein Onboardvideo. https://vimeo.com/52791328 Hier sieht man die rythmischen Tics. Das hat allerdings nichts mehr mit den Haken von Gestern zu tun.
Viele Grüße
Henry
Edit: hier mal ein Onboardvideo. https://vimeo.com/52791328 Hier sieht man die rythmischen Tics.
Marcus
Hey Marcus,
Klasse Video ;-) Die Ticks sehen aus wie meine. Das sind aber nur leichte Einbrüche, wenn ich das richtig gesehen habe. Wenn die Dekodierung des Summensignals nicht richtig klappt, dann sieht das genauso aus.
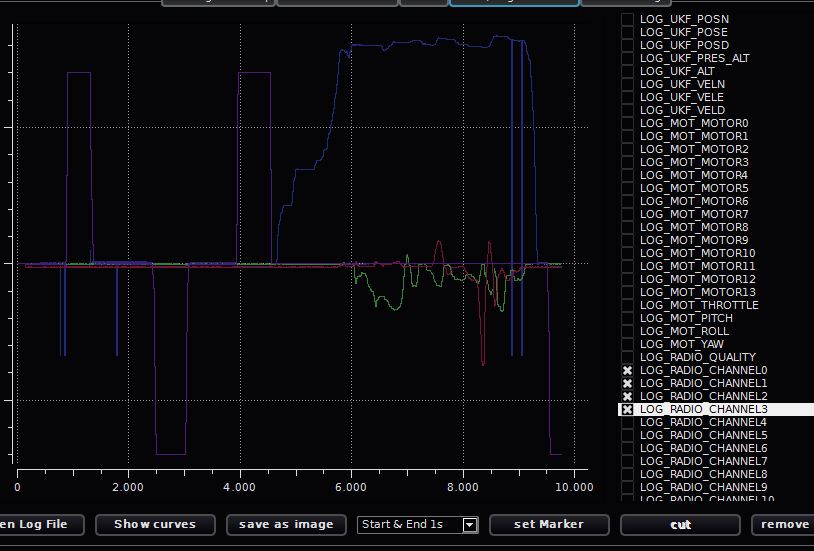
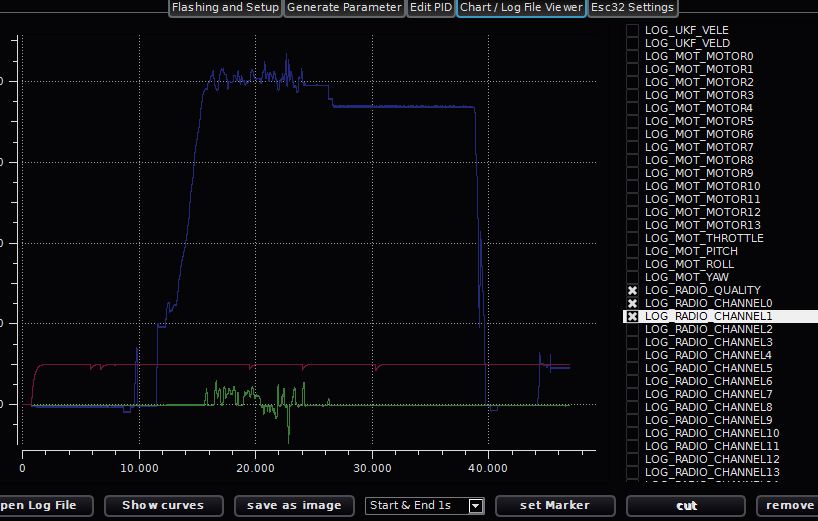
Wir sprechen in meinem Fall laut Scala von einem Haken von -8 Max. Die großen Haken vorher gingen teilweise um -700 herunter.
Das werde ich mir im Laufe der Woche nochmal anschauen") Jetzt geht es erst mal in den Kurzurlaub.
Jetzt geht es erst mal in den Kurzurlaub.
Viele Grüße
Henry
Klasse Video ;-) Die Ticks sehen aus wie meine. Das sind aber nur leichte Einbrüche, wenn ich das richtig gesehen habe. Wenn die Dekodierung des Summensignals nicht richtig klappt, dann sieht das genauso aus.
Wir sprechen in meinem Fall laut Scala von einem Haken von -8 Max. Die großen Haken vorher gingen teilweise um -700 herunter.
Das werde ich mir im Laufe der Woche nochmal anschauen
Jetzt geht es erst mal in den Kurzurlaub.Viele Grüße
Henry
hm, wenn ich Kanal 0 und 1 für Quer und Nick verwende anstatt Gas und Roll bleibt die Kiste kontrolierbar und im PH ist es auch nicht so schlimm, schlimm genug aber das das Gimbal die Wackler nicht ausbessern kann.
Gegen Ende des ersten Accu hats beim Landen 1 Meter über Boden noch einmal am Nick gerissen und leider war der Accu auch schon zu weit unten was dann in einem sanften FOD geendet hat. Gottseidank weiches Gras somit is nix passiert.
Dabei grenzt das schon an WooDoo was ich alles gemacht hab um die Empfängerspannung zu säubern.
BEC, Feritkern in Zu und Ableitung, Leitungen verdrillt......

aber:

Legende: CHANNEL0: blau, CHANNEL1: grün, CH2:rot, CH3:violet, QUALITY: pink
Gegen Ende des ersten Accu hats beim Landen 1 Meter über Boden noch einmal am Nick gerissen und leider war der Accu auch schon zu weit unten was dann in einem sanften FOD geendet hat. Gottseidank weiches Gras somit is nix passiert.
Dabei grenzt das schon an WooDoo was ich alles gemacht hab um die Empfängerspannung zu säubern.
BEC, Feritkern in Zu und Ableitung, Leitungen verdrillt......
aber:
Legende: CHANNEL0: blau, CHANNEL1: grün, CH2:rot, CH3:violet, QUALITY: pink
ah, aufpassen, die Ausgänge sind 400Hz da grillst dir deine analogen Servos.
Möglichkeit 1: du änderst den Tackt im Suorcecode und kompilierst neu oder
Möglichkeit 2: du tauscht auf Digitale um.
Edit:
http://autoquad.org/wiki/wiki/getting-started/configuring-autoquad-flightcontroller/gimbal-settings/
Möglichkeit 1: du änderst den Tackt im Suorcecode und kompilierst neu oder
Möglichkeit 2: du tauscht auf Digitale um.
Edit:
http://autoquad.org/wiki/wiki/getting-started/configuring-autoquad-flightcontroller/gimbal-settings/
note if you use analog servo’s that run on 50-100Hz you need to select two ports that don’t share the defined motor timers and compile your own version (for now).
Henry, hast du neue Ergebnisse zu den Ticks?
Wir sind inzwischen schon mit dem Oszi auf der Jagd aber das zieht sich dahin.
Interessant ist das wir im PPM code vom AQ einen Fehler gefunden haben, ausgebessert -aber hat leider nix verändert.
Ich hab zwei Boards, eines ist vernachlässigbar sauber das Andere reißt es wie die *sprichwörtlich* "Katz beim sch....." und das mit ein und dem selben Empfänger.
Jetzt bekomm ich ein drittes Board, mal sehn wie das reagiert.
Btw. Jeti PPM ist super sauber.
edit: Also die HoTT Empfänger können ausgeschlossen werden, das Signal ist auch über längere Zeit absolut fehlerfrei, saubere 500ns Flanken, konstante 3V mehr brauchts nicht. Jetzt geht die Fehlersuche im AQ Code los.

Wir sind inzwischen schon mit dem Oszi auf der Jagd aber das zieht sich dahin.
Interessant ist das wir im PPM code vom AQ einen Fehler gefunden haben, ausgebessert -aber hat leider nix verändert.
Ich hab zwei Boards, eines ist vernachlässigbar sauber das Andere reißt es wie die *sprichwörtlich* "Katz beim sch....." und das mit ein und dem selben Empfänger.
Jetzt bekomm ich ein drittes Board, mal sehn wie das reagiert.
Btw. Jeti PPM ist super sauber.
edit: Also die HoTT Empfänger können ausgeschlossen werden, das Signal ist auch über längere Zeit absolut fehlerfrei, saubere 500ns Flanken, konstante 3V mehr brauchts nicht. Jetzt geht die Fehlersuche im AQ Code los.
Zuletzt bearbeitet:
Ohhhh sorry - gerade erst gesehen.
Die Ticks sind bei mir absolut verschwunden. Im Testquad sind die Ruckler zwar leicht zu spüren, allerdings auch dann wenn der AQ autonom fliegt und somit keine FS mit involviert ist. Das dürfte allerdings durchaus an den Reglern liegen, welche zu langsam regeln.
Die Ticks der Fernsteuerung sind dank UBEC bei mir komplett verschwunden.
Leider liegt das Projekt momentan etwas brach, da der Testcopter einen Knickarm hat. Er ist aus noch nicht definierbaren Gründen abgestürzt.
Viele Grüße
Henry
Die Ticks sind bei mir absolut verschwunden. Im Testquad sind die Ruckler zwar leicht zu spüren, allerdings auch dann wenn der AQ autonom fliegt und somit keine FS mit involviert ist. Das dürfte allerdings durchaus an den Reglern liegen, welche zu langsam regeln.
Die Ticks der Fernsteuerung sind dank UBEC bei mir komplett verschwunden.
Leider liegt das Projekt momentan etwas brach, da der Testcopter einen Knickarm hat. Er ist aus noch nicht definierbaren Gründen abgestürzt.
Viele Grüße
Henry
Ich kann nun offiziell verkünden das das PPM Aussetzer-Problem entgültig der Geschichte angehört!
Wir haben es geschafft auch bei aller schlimmsten Bedingungen einen sauberen Kanal 0 und 1 (das waren die Beiden mit den Aussetzern) zu erhalten.
Mit bissi tuning im Code und einem Kondensator am Board aber näheres wir der Codemeister erklären sobald er das mit Bill geklärt hat.
Ich bin happy, nun kann ich alle meine AQ´s mit Hott fliegen und muß mir darüber keine Gedanken mehr machen.
MäX
Ich kann nun offiziell verkünden das das PPM Aussetzer-Problem entgültig der Geschichte angehört!
Wir haben es geschafft auch bei aller schlimmsten Bedingungen einen sauberen Kanal 0 und 1 (das waren die Beiden mit den Aussetzern) zu erhalten.
Mit bissi tuning im Code und einem Kondensator am Board aber näheres wir der Codemeister erklären sobald er das mit Bill geklärt hat.
Ich bin happy, nun kann ich alle meine AQ´s mit Hott fliegen und muß mir darüber keine Gedanken mehr machen.
MäX
Was mich nach wie vor wundert................warum war Jeti-PPM bis jetzt ohne Probleme?
Gruß
Joachim

