
Arducopter 3.3 RC 1
- Themenstarter rose1203
- Beginndatum
Warning #1: a bug has been found in Copter-3.3.1 which can lead to a sudden momentary drop when switching from Stabilize or Acro to AltHold, Loiter or PosHold. The issue is that the desired climb rate is not being initialised properly meaning the climb rate from the last time the vehicle exited AltHold, Loiter or PosHold is being used. Copter-3.3.2-rc1 will be released for testing within days.
Warning #2: an issue has been found in Copter-3.3.1 which can lead to hard landings in RTL or AUTO if the WPNAV_SPEED_DN is set too high (i.e. >400 or 4m/s) and/or the WPNAV_ACCEL_Z is set too low (i.e. <100 or 1m/s/s). We hope to resolve this in Copter-3.3.2-rc1.
Warning #2: an issue has been found in Copter-3.3.1 which can lead to hard landings in RTL or AUTO if the WPNAV_SPEED_DN is set too high (i.e. >400 or 4m/s) and/or the WPNAV_ACCEL_Z is set too low (i.e. <100 or 1m/s/s). We hope to resolve this in Copter-3.3.2-rc1.
Stell doch mal ein Logfile von so einem Ereignis ein, dann könnte man der Sache auf den Grund gehen. Umschalten (außer nach FLIP) löst bei meinen drei 3.3.1 jedenfalls keinen Flip aus.
By the way: Der Flipmode in 3.3.1 selbst hat wohl einen Fehler: https://www.youtube.com/watch?v=FoJkj9W1mCI
Hier der Beitrag dazu:
https://github.com/diydrones/ardupilot/issues/3076
By the way: Der Flipmode in 3.3.1 selbst hat wohl einen Fehler: https://www.youtube.com/watch?v=FoJkj9W1mCI
Hier der Beitrag dazu:
https://github.com/diydrones/ardupilot/issues/3076

Ich konnte mir meine Neugierde nicht verkneifen, den Flipmode mal (mit zur Sicherheit hoch stehendem Raps) mit 8 Motoren zu testen. Ein Kopterfreund war so nett, und hat eine Kamera draufgehalten und hochgeladen: https://www.youtube.com/watch?v=KADwDLnJoz8&feature=youtu.be
(noch mit der 3.2.1)
(noch mit der 3.2.1)
Tjo son Flip ist ja ok, meiner Macht aber beim umschalten ab und zu nach hinten links.
Wenn man es steuern wollte bekäme man es so genau bestimmt nicht hin.
Logs hab ich keine. In der Pixhawk Lite war eine 4GB Karte drinn die defekt ist. Ob das zu diesem Verhalten führen kann?
Habe ich daheim erst festgestellt. Jetzt habe ich aus ner ändern Pixhawk die 2GB Karte drinn da. Läuft das logging.
Mit der 4 GB hatte ich nur Chinesische Schriftzeichen als Dateinamen.
Warte jetzt auf brauchbares Wetter, hier windet und schüttet es die ganze Zeit.
Wenn man es steuern wollte bekäme man es so genau bestimmt nicht hin.
Logs hab ich keine. In der Pixhawk Lite war eine 4GB Karte drinn die defekt ist. Ob das zu diesem Verhalten führen kann?
Habe ich daheim erst festgestellt. Jetzt habe ich aus ner ändern Pixhawk die 2GB Karte drinn da. Läuft das logging.
Mit der 4 GB hatte ich nur Chinesische Schriftzeichen als Dateinamen.
Warte jetzt auf brauchbares Wetter, hier windet und schüttet es die ganze Zeit.
Es tut sich was in Sachen Px4Flow: http://diydrones.com/forum/topics/optical-flow-discussion-thread
Was denn ? Ich habe diesen Thread mit Interesse gelesen. Mir war danach nicht wirklich klar, warum Randy die Leiche wieder ausgräbt.
Issues
If you don't take off immediately after arming and bring your copter to at least about 1 meter, EKF will stop using OF data and you'll be flying manually.
Sometimes OF drops out suddenly mid-flight when readings are off, but there's no warning or indication. Only way to know is to look at the dataflash logs.
When flying with OF, the aircraft starts to drift off as time goes by. It appears EKF5.FIX and EKF5.FIY gets too large over time.
Loiter mode feels a little "sluggish" compared to stabilize, etc., and it's easy to get confused and panic as it seems like the copter is not responding to your RC input at all.
If you are getting nothing in the logs (make sure you are looking at the dataflash logs and not the telemetry logs), fire up NSH, and issue px4flow status command to see if the PX4FLOW module is detected on I2C and the driver is loaded. You should see a bunch of readouts if it's functioning correctly and error message otherwise.
At least one of the PX4FLOW clones (one without the on-board sonar module, bought from China) did not work when connected via I2C. It can be very confusing as it appears to be working just fine when connected directly to the PC via USB. PX4FLOW with sonar (bought direct from 3DR) doesn't have this problem.
If you don't take off immediately after arming and bring your copter to at least about 1 meter, EKF will stop using OF data and you'll be flying manually.
Sometimes OF drops out suddenly mid-flight when readings are off, but there's no warning or indication. Only way to know is to look at the dataflash logs.
When flying with OF, the aircraft starts to drift off as time goes by. It appears EKF5.FIX and EKF5.FIY gets too large over time.
Loiter mode feels a little "sluggish" compared to stabilize, etc., and it's easy to get confused and panic as it seems like the copter is not responding to your RC input at all.
If you are getting nothing in the logs (make sure you are looking at the dataflash logs and not the telemetry logs), fire up NSH, and issue px4flow status command to see if the PX4FLOW module is detected on I2C and the driver is loaded. You should see a bunch of readouts if it's functioning correctly and error message otherwise.
At least one of the PX4FLOW clones (one without the on-board sonar module, bought from China) did not work when connected via I2C. It can be very confusing as it appears to be working just fine when connected directly to the PC via USB. PX4FLOW with sonar (bought direct from 3DR) doesn't have this problem.
Was denn ? Ich habe diesen Thread mit Interesse gelesen. Mir war danach nicht wirklich klar, warum Randy die Leiche wieder ausgräbt.
Nachvollziehbare Parametriserungen und Anleitungen lassen hoffen, dass mehr Leute Alpha-Testen und es schneller klar wird, auf was man eigentlich angesichts der Einschränkungen der Hardeware hin entwickeln möchte.
Ich habe den Px4flow mit der empfohlenen Firmware für den Ardukopter am Rechner eingestellt und ausgelesen: Das Dingen braucht eine Menge Licht. Den Kopter Indoor bei Kaminlicht den Rotwein an die Couch fliegen lassen, kann man getrost vergessen. Ist genug Licht da, muss gut auf eine Höhe, in der man fliegen will, fokussiert werden. Außerhalb der Fokusebene werden die Werte da schnell schlechter.
Indoor wird man eine Flughöhe in 1-5 Meter haben wollen. Da braucht man keinen LIDAR bis 70 Meter, der schreckt nur ab. Und Anwendungen, bei denen ich in 70 Meter Höhe kein GPS habe, dürften eher die Ausnahme sein. Ein Sonar scheint es ja inzwischen auch zu tun und damit werde ich es demnächst testen.
Weiterhin ärgerlich ist, dass das eingebaute Sonar durch Anlöten eines Kabels analog ausgelesen werden muss, obwohl die Daten Zentimetergenau und Dank eigener IMU bereits befreit von Messfehlern durch Nick/Roll-Schräglage über I2C übertragen werden. Werde es also mit dem aktuell verbauten Maxbotix am Testkopter ausprobieren.
Gruß Rolf
Copter V3.3.2 ist raus (Schläft Robert ?)
Unauffällig geflogen : Stab/ALT/PosHold/Land auf PIXHAWK LITE @ F450/E300/GLB GNSS (Trottelcopter)
Auffällig: Vib Werte stellen sich im Log noch niedriger dar.
Da hat man am EKF geschraubt.
Nach wie vor lesenswert.
Extended Kalman Filter Navigation Overview and Tuning
http://dev.ardupilot.com/wiki/extended-kalman-filter/
Man muß nicht alles lesen, aber das ist spannend:
4. Interpreting Log Data / EKF3 : Noise Werte aus dem Log zum Einstellen verwenden.
Unauffällig geflogen : Stab/ALT/PosHold/Land auf PIXHAWK LITE @ F450/E300/GLB GNSS (Trottelcopter)
Auffällig: Vib Werte stellen sich im Log noch niedriger dar.
Da hat man am EKF geschraubt.
Nach wie vor lesenswert.
Extended Kalman Filter Navigation Overview and Tuning
http://dev.ardupilot.com/wiki/extended-kalman-filter/
Man muß nicht alles lesen, aber das ist spannend:
4. Interpreting Log Data / EKF3 : Noise Werte aus dem Log zum Einstellen verwenden.
Copter 3.3.2 01-Dec-2015 / 3.3.2-rc2 18-Nov-2015
Changes from 3.3.2-rc1
1) Bug fix for desired climb rate initialisation that could lead to drop when entering AltHold, Loiter, PosHold
2) Fix to hard landings when WPNAV_SPEED_DN set high in RTL, Auto (resolved by using non-feedforward alt hold)
3) Reduce Bad AHRS by filtering innovations
4) Allow arming without GPS if using Optical Flow
5) Smoother throttle output in Guided mode's velocity control (z-axis now 400hz)
Changes from 3.3.2-rc1
1) Bug fix for desired climb rate initialisation that could lead to drop when entering AltHold, Loiter, PosHold
2) Fix to hard landings when WPNAV_SPEED_DN set high in RTL, Auto (resolved by using non-feedforward alt hold)
3) Reduce Bad AHRS by filtering innovations
4) Allow arming without GPS if using Optical Flow
5) Smoother throttle output in Guided mode's velocity control (z-axis now 400hz)
Bei den Vibrationen kann ich keine wirkliche Leveländerung im Vergleich zur 3.3.1 erkennen. Die Höhenregelung mit einem Maxbotix 1230 Sonar als Rangefinder fühlt sich noch besser an, dass ich auch denke, dass am EKF geschraubt wurde. Über Pflaster bei 50cm bis 2 Meter Höhe geschätzt auf einen bis zwei Zentimeter genau. Das Bodenfolgen funktioniert einwandfrei und ist sehr gut ausgeregelt. Wer mit einem Rangefinder zwischen 25 cm und 6 Meter auskommt, braucht mE. gar kein LIDAR für den 2,5-4 fachen Preis und 10fachem Gewicht.
Schön, dass der MB1230 jetzt gut auf hartem UG funktioniert. Habe ich meinen wohl zu früh entsorgt (Spaß)..
Hier mal ein Angeber Vib Log (Nein, ich stand da nicht ruhig auf der Stelle). Mit Deinem Latex Foam (Besten Dank nochmal !) , PX Derivat im Quanum Nova (allerdings auch mit DJI Motoren/Props).
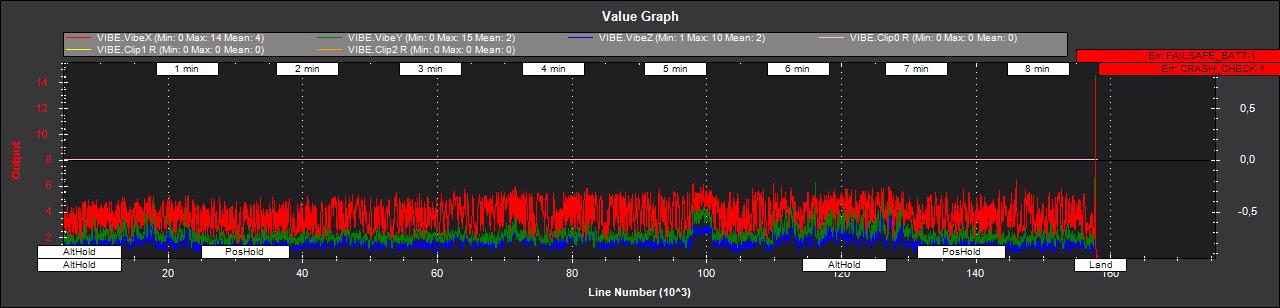
http://fs5.directupload.net/images/151204/k5gnozin.jpg
Auto Analysis meldet da bei IMU Mismatch übrigens nan, ich dachte zunächst an eine Fehlfunktion.
Land (Detect) funktioniert aber bei diesen Vögeln nicht wirklich, da muß man immer noch wie früher landen oder einen Kill Switch verwenden. Sonst hoppst er, fällt um, und ruiniert die fein balancierten Props. Es hätten nur noch Zuschauer gefehlt...
Hier mal ein Angeber Vib Log (Nein, ich stand da nicht ruhig auf der Stelle). Mit Deinem Latex Foam (Besten Dank nochmal !) , PX Derivat im Quanum Nova (allerdings auch mit DJI Motoren/Props).
http://fs5.directupload.net/images/151204/k5gnozin.jpg
Auto Analysis meldet da bei IMU Mismatch übrigens nan, ich dachte zunächst an eine Fehlfunktion.
Land (Detect) funktioniert aber bei diesen Vögeln nicht wirklich, da muß man immer noch wie früher landen oder einen Kill Switch verwenden. Sonst hoppst er, fällt um, und ruiniert die fein balancierten Props. Es hätten nur noch Zuschauer gefehlt...
Zuletzt bearbeitet:

