Hi. Erstmal wünsch ich euch allen einen guten Rutsch und so
Über Weihnachten und Neujahr bin ich endlich zum Kopterbau gekommen. Soweit sieht alles ganz gut aus. Er liegt stabil in der Luft und fliegt.
Jedoch folgende zwei Probleme:
1. Mehrfach hat sich der Kopter mitten im Flug fast senkrecht gestellt (ca 60°). Eine Steuerung war fast unmöglich und man musste bruchlanden (zum Glück nicht abstürzen!). Waran kann das liegen? Hatte das schon mal einer? Vielleicht hängt es auch mit dem zweiten Problem zusammen...
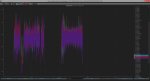
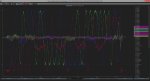
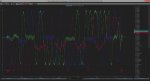
2. Habe ich große Probleme mit der dynamischen Kalibrierung. Die Berechnungen brauchen ewig und spucken scheiß Werte aus. z.B weicht die Inklination um ca 25° ab. Außerdem zeigt die virtuelle Kompassnadel nicht nach Norden, sondern weicht um etwa 120° ab. Wo liegt das Problem in meinem Log?
Bilder vom Kopter kommen natürlich auch noch")
Vielen Dank

Über Weihnachten und Neujahr bin ich endlich zum Kopterbau gekommen. Soweit sieht alles ganz gut aus. Er liegt stabil in der Luft und fliegt.
Jedoch folgende zwei Probleme:
1. Mehrfach hat sich der Kopter mitten im Flug fast senkrecht gestellt (ca 60°). Eine Steuerung war fast unmöglich und man musste bruchlanden (zum Glück nicht abstürzen!). Waran kann das liegen? Hatte das schon mal einer? Vielleicht hängt es auch mit dem zweiten Problem zusammen...
2. Habe ich große Probleme mit der dynamischen Kalibrierung. Die Berechnungen brauchen ewig und spucken scheiß Werte aus. z.B weicht die Inklination um ca 25° ab. Außerdem zeigt die virtuelle Kompassnadel nicht nach Norden, sondern weicht um etwa 120° ab. Wo liegt das Problem in meinem Log?
Bilder vom Kopter kommen natürlich auch noch
Vielen Dank