
ct hacks fräse, cnc-kit von wantai, grbl und ein überforderter cnc-einsteiger
- Themenstarter tomm
- Beginndatum
super, danke dir.
ich hab jetzt nur A- mit A+ getauscht, und schon fährts in die richtige richtung.
jetzt erklär mir mal noch einer, für was der parameter $6 dann bei grbl ist? wenn ich die doku im netz verstanden hab, müsste der doch genau die richtungsinvertierung in software machen? klappt aber nicht, zumindest nicht bei mir.
nächstes problem ist nochmal das integrieren des wantai db25 bob.
muss ich aber nochmal zusammenmschreiben, was ich bisher versucht hab.
ich vermute ja, dass es ein potentialproblem ist, aber dafür hab ich von elektronik einfach zu wenig ahnung.
aber wenn ich nach "yang" verdrahte, sprich Step+, Dir+, Ena+ auf 5V und die - auf die jeweiligen pins am arduino, hab ich ja nirgends GND belegt. falls gemand direkt was dazu einfällt, gerne")
ansonsten schreib ichs später nochmal ordentlich zusammen.
schonmal danke und grüsse
tom
ich hab jetzt nur A- mit A+ getauscht, und schon fährts in die richtige richtung.
jetzt erklär mir mal noch einer, für was der parameter $6 dann bei grbl ist? wenn ich die doku im netz verstanden hab, müsste der doch genau die richtungsinvertierung in software machen? klappt aber nicht, zumindest nicht bei mir.
nächstes problem ist nochmal das integrieren des wantai db25 bob.
muss ich aber nochmal zusammenmschreiben, was ich bisher versucht hab.
ich vermute ja, dass es ein potentialproblem ist, aber dafür hab ich von elektronik einfach zu wenig ahnung.
aber wenn ich nach "yang" verdrahte, sprich Step+, Dir+, Ena+ auf 5V und die - auf die jeweiligen pins am arduino, hab ich ja nirgends GND belegt. falls gemand direkt was dazu einfällt, gerne
ansonsten schreib ichs später nochmal ordentlich zusammen.
schonmal danke und grüsse
tom
so, damit es hier auch mal weiter geht.
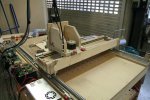
mechanisch ist die fräse eigentlich fast fertig (falls so ein projekt überhaupt jemals wirklich fertig werden kann).
einige testfräsungen sind gemacht und ich bin eigentlich ganz zufrieden. (mal abgesehen von einem "stottern" bei fahrt auf der x-achse. mal sehen, ob man das in einem video erkennen kann, vielleicht hat ja jemand einen hinweis)
zu sehen wäre da:
- absaugung ala martinez/fpv-floh
- lochplatte mit gewindeeinsätzen
- spannpratzen
- frickler's gofly pocket in 1,5mm gfk







hier mal noch eine ganz grobe kostenzusammenstellung:
200 eur 20er linearführungen mit wagen, 800+1200mm
60 eur zahnriemen und -räder, wellenkupplung für z-achse
160 eur wantai-kit stepper + treiber
30 eur kugellager und schrauben
70 eur holz (birke multiplex 21mm)
100 eur z-achse fertigteil
macht zusammen 620eur für die fräse.
dazu kamen dann noch 180 eur für die kress, 50eur für die grbl-ct-patine und 35eur für die elektronischen bauteile.
wenn man jetzt nicht unbedingt die ct-variante mit dem jogger haben will, läuft grbl natürlich auch auf einem gewöhnlichen arduino für weniger geld oder man nutzt eine ganz andere ansteuerung.
verfahrweg ist 101x62cm, die z-achse macht 74mm. ist also eher für flache bauteile/plattenware ausgelegt.
cad-modell und 3d-pdf häng ich auch mal mit dran.
Anhang anzeigen Holzfräse.zip
falls interesse besteht, kann ich auch die bauteile und bezugsquellen mal zusammenschreiben, die ich verwendet habe.
beim zahnriemen hatte ich mich für einen gt2 riemen entschieden, da es dafür passende zahnräder mit 6,35mm bohrung auf den nema23 gab. der riemen hat fiberglaszugstränge im kern. die t2,5 riemen gäb's auch mit stahlzugsträngen, allerdings hab ich da keine zahnräder mit passender bohrung gefunden und aufbohren wollt ich nicht. hat da einer evtl erfahrung mit? sind die t2,5 riemen im vergleich zu den gt2-riemen stabiler, vorallem, haben sie weniger dehnung? die x-achse hat durch den flaschenzug eine riemenlänge von 7m, da ist die dehnung des riemens bei krafteinwirkung schon merklich, obwohl ich ganz ordentlich vorgespannt habe. shapeoko nutzt ja glaube ich auch gt2, allerdings sind die riemenlängen da deutlich geringer.
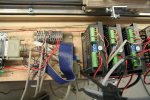
was als nächstes jetzt ansteht ist eine ordentliche elektrische verkabelung, die ist bisher noch ziemlich fliegend und der anschluss der endschalter.
und da kommen wieder meine probleme mit dem wantai-db25-bob ins spiel.
funktionieren tut der grundsätzlich. zumindest hatte ich ihn mal kurz an einem linuxcnc-laptop und konnte alle motoren korrekt ansteuern. nur wenn's an der grbl-platine hängt, funktoniert es nicht zuverlässig. mal geht's, ein tag später geht es dann wieder nicht. wackelkontakt kann ich eigentlich fast ausschliessen.
bei http://www.rc-network.de/forum/showthread.php/435015-CNC-Eigenbau-mit-Chinasteuerung hab ich auch ein paar infos dazu gefunden, werde da aber auch nicht schlauer draus.
verdrahtet habe ich nach "yang"-schema.
also alle + an den treiberkarten auf 5v, die ich mir von der grbl-platine abzweige.
x_puls- auf pin 3
x_dir- auf pin 2
x_enbl- auf pin 1
y_puls- auf pin 5 etc.
direkte fliegende verdrahtung von grbl-platine zu motortreibern wie auf den bildern zu sehen ist funktioniert, wenn der db-25 bob dazwischen ist, geht's eben nur manchmal. dann funktioniert z.b. nur der x-motor und y eben nicht. ist aber nicht reproduzierbar, effekte sind immer mal unterschiedlich. für eine schöne verkabelung wäre der bob aber ganz praktisch, auch im hinblick darauf, evtl. doch mal linuxcnc zu nutzen. dann müsste ich nur das parallelkabel von der grbl-platine auf den linuxcnc-rechner umstecken.
hat einer von euch noch eine idee?
vg und einen schönen 1. mai
tom
mechanisch ist die fräse eigentlich fast fertig (falls so ein projekt überhaupt jemals wirklich fertig werden kann).
einige testfräsungen sind gemacht und ich bin eigentlich ganz zufrieden. (mal abgesehen von einem "stottern" bei fahrt auf der x-achse. mal sehen, ob man das in einem video erkennen kann, vielleicht hat ja jemand einen hinweis)
zu sehen wäre da:
- absaugung ala martinez/fpv-floh
- lochplatte mit gewindeeinsätzen
- spannpratzen
- frickler's gofly pocket in 1,5mm gfk
hier mal noch eine ganz grobe kostenzusammenstellung:
200 eur 20er linearführungen mit wagen, 800+1200mm
60 eur zahnriemen und -räder, wellenkupplung für z-achse
160 eur wantai-kit stepper + treiber
30 eur kugellager und schrauben
70 eur holz (birke multiplex 21mm)
100 eur z-achse fertigteil
macht zusammen 620eur für die fräse.
dazu kamen dann noch 180 eur für die kress, 50eur für die grbl-ct-patine und 35eur für die elektronischen bauteile.
wenn man jetzt nicht unbedingt die ct-variante mit dem jogger haben will, läuft grbl natürlich auch auf einem gewöhnlichen arduino für weniger geld oder man nutzt eine ganz andere ansteuerung.
verfahrweg ist 101x62cm, die z-achse macht 74mm. ist also eher für flache bauteile/plattenware ausgelegt.
cad-modell und 3d-pdf häng ich auch mal mit dran.
Anhang anzeigen Holzfräse.zip
falls interesse besteht, kann ich auch die bauteile und bezugsquellen mal zusammenschreiben, die ich verwendet habe.
beim zahnriemen hatte ich mich für einen gt2 riemen entschieden, da es dafür passende zahnräder mit 6,35mm bohrung auf den nema23 gab. der riemen hat fiberglaszugstränge im kern. die t2,5 riemen gäb's auch mit stahlzugsträngen, allerdings hab ich da keine zahnräder mit passender bohrung gefunden und aufbohren wollt ich nicht. hat da einer evtl erfahrung mit? sind die t2,5 riemen im vergleich zu den gt2-riemen stabiler, vorallem, haben sie weniger dehnung? die x-achse hat durch den flaschenzug eine riemenlänge von 7m, da ist die dehnung des riemens bei krafteinwirkung schon merklich, obwohl ich ganz ordentlich vorgespannt habe. shapeoko nutzt ja glaube ich auch gt2, allerdings sind die riemenlängen da deutlich geringer.
was als nächstes jetzt ansteht ist eine ordentliche elektrische verkabelung, die ist bisher noch ziemlich fliegend
und der anschluss der endschalter.und da kommen wieder meine probleme mit dem wantai-db25-bob ins spiel.
funktionieren tut der grundsätzlich. zumindest hatte ich ihn mal kurz an einem linuxcnc-laptop und konnte alle motoren korrekt ansteuern. nur wenn's an der grbl-platine hängt, funktoniert es nicht zuverlässig. mal geht's, ein tag später geht es dann wieder nicht. wackelkontakt kann ich eigentlich fast ausschliessen.
bei http://www.rc-network.de/forum/showthread.php/435015-CNC-Eigenbau-mit-Chinasteuerung hab ich auch ein paar infos dazu gefunden, werde da aber auch nicht schlauer draus.
verdrahtet habe ich nach "yang"-schema.
also alle + an den treiberkarten auf 5v, die ich mir von der grbl-platine abzweige.
x_puls- auf pin 3
x_dir- auf pin 2
x_enbl- auf pin 1
y_puls- auf pin 5 etc.
direkte fliegende verdrahtung von grbl-platine zu motortreibern wie auf den bildern zu sehen ist funktioniert, wenn der db-25 bob dazwischen ist, geht's eben nur manchmal. dann funktioniert z.b. nur der x-motor und y eben nicht. ist aber nicht reproduzierbar, effekte sind immer mal unterschiedlich. für eine schöne verkabelung wäre der bob aber ganz praktisch, auch im hinblick darauf, evtl. doch mal linuxcnc zu nutzen. dann müsste ich nur das parallelkabel von der grbl-platine auf den linuxcnc-rechner umstecken.
hat einer von euch noch eine idee?
vg und einen schönen 1. mai
tom
nur wenn's an der grbl-platine hängt, funktoniert es nicht zuverlässig. mal geht's, ein tag später geht es dann wieder nicht. wackelkontakt kann ich eigentlich fast ausschliessen.
ich habe deinen Post aufmerksam gelesen. Ich baue z. Zt. auch gerade eine Sperrholzfräse. Ich habe auch Probleme wie du sie hast mit der GRBL Platine vom CT Verlag. Bei meinem Exemplar tritt fast regelmäßig auf, das beim ersten Einschalten die Steuerung komplett hängt sobald Z+, oder eine andere Run Taste gedrückt wird. Beim 2. oder 3. einschalten funktionieren dann zumindest die + Tasten xyz, die minus xyz geben keine Pulse raus. Wie du schon beschriebst, mal so und mal so. Ich habe dem C. Meyer von der CT eine E-mail geschrieben, leider noch keine Reaktion. Im CT Forum habe ich auch gepostet, allerdings null Antworten. Ich denke es liegt an der Firmware, irgend etwas ist wackelig Programmiert. Ich habe die Vermutung das ich mich selbst durch den Code roben muss. Die Hardware ist es jedenfalls nicht, da ist alles im Grünen Bereich. Mal abgesehen davon das er auf der Reset Leitung des Atmel keinen Kondensator hat. Ich habe einen eingebaut (werte zwischen 100nF und 1 uF ausprobiert) und das wars aber nicht. Ich arbeite und bastel viel mit AVR mikroc., aber sowas hartnäckiges habe ich noch nicht gehabt.
Gruß
Andreas
hallo andreas,
denn effekt hat meine platine auch. nach dem einschalten muss ich auch immer mehrfach resetten, bevor das ding überhaupt reagiert. leider hab ich von der avr programmierung aber viel zu wenig ahnung, um da selber was zu machen.
das ct forum ist kaum eine hilfe, da tut sich wenig bis nichts. was die minus xyz problematik angeht, hast du den thread aber gesehen, oder?
http://www.heise.de/forum/c-t-Hacks/Heft-Projekte/Artikelforen-Heft-1-2014/CNC-Controller/Re-Hilfe-Probleme-bei-Richtungsaenderung-und-alter-Chinakarte/posting-499379/show/
wenn du in sachen code verbesserungen was hinkriegst, lass es mich wissen.
sonst hätt' man sich die 50eur für die ct-platine auch sparen können und einen billigen arduino mit orginal grbl-firmware nehmen können
vg
tom
denn effekt hat meine platine auch. nach dem einschalten muss ich auch immer mehrfach resetten, bevor das ding überhaupt reagiert. leider hab ich von der avr programmierung aber viel zu wenig ahnung, um da selber was zu machen.
das ct forum ist kaum eine hilfe, da tut sich wenig bis nichts. was die minus xyz problematik angeht, hast du den thread aber gesehen, oder?
http://www.heise.de/forum/c-t-Hacks/Heft-Projekte/Artikelforen-Heft-1-2014/CNC-Controller/Re-Hilfe-Probleme-bei-Richtungsaenderung-und-alter-Chinakarte/posting-499379/show/
wenn du in sachen code verbesserungen was hinkriegst, lass es mich wissen.
sonst hätt' man sich die 50eur für die ct-platine auch sparen können und einen billigen arduino mit orginal grbl-firmware nehmen können
vg
tom
Hallo Tomm,
nein diese Beitrag habe ich noch nicht gesehen. Danke.
Auf jedenfall informiere ich dich wenn ich etwas finde oder verbesser. Das diese CT Forum schlecht bis fast garnicht besucht wird hätte ich nicht gedacht. Übersichtlich ist es jedenfalls nicht.
Ein Arduino hätte es auch getan, mich interessiert allerdings die Möglichkeit die Fräse auch ohne PC zu bewegen, um zb. mal einen Schlitz ins Balsa zu ziehen. Ich denke ich schaue hier jetzt mal öfter rein.
Ich könnte auch mal ein paar Bilder reinstellen von meiner Fräse falls es dich interessiert. Ich habe bei E-Bay eine TB6560 Karte mit Netzteil und 3 Nema Motoren gekauft. Die Pin Belegung paßt vorne und hinten nicht, ich werde auch wohl eine Patchbox kaufen für den DB25.
nein diese Beitrag habe ich noch nicht gesehen. Danke.
Auf jedenfall informiere ich dich wenn ich etwas finde oder verbesser. Das diese CT Forum schlecht bis fast garnicht besucht wird hätte ich nicht gedacht. Übersichtlich ist es jedenfalls nicht.
Ein Arduino hätte es auch getan, mich interessiert allerdings die Möglichkeit die Fräse auch ohne PC zu bewegen, um zb. mal einen Schlitz ins Balsa zu ziehen. Ich denke ich schaue hier jetzt mal öfter rein.
Ich könnte auch mal ein paar Bilder reinstellen von meiner Fräse falls es dich interessiert. Ich habe bei E-Bay eine TB6560 Karte mit Netzteil und 3 Nema Motoren gekauft. Die Pin Belegung paßt vorne und hinten nicht, ich werde auch wohl eine Patchbox kaufen für den DB25.
na klar, interessiert mich auf jeden fall. hast du dich denn an den bauvorschlag gehalten, oder auch modifiziert?
wie ist das denn bei dir mit der dehnung des zahnriemens?
die entscheidung für die grbl-jogger platine waren bei mir ähnliche überlegungen, bisher aber dann doch immer einen pc angeschlossen (dann kann man auch gleich angeben, wie lang und tief der schlitz wird
wie ist das denn bei dir mit der dehnung des zahnriemens?
die entscheidung für die grbl-jogger platine waren bei mir ähnliche überlegungen, bisher aber dann doch immer einen pc angeschlossen (dann kann man auch gleich angeben, wie lang und tief der schlitz wird
Hallo, endlich Wochenende. Zum Thema: Ich habe mich durchweg an die Bauvorschläge und Bemaßungen gehalten. Du hast den X Motor ausserhalb der Werkzeugfläche angebracht. Gute Idee.
Du hast schon einen PC angeschlossen? Was läuft darauf? Kann man die Belegung des LTP, also den DB25 bei CAM Programmen frei wählen?
Ich habe bisher nur ein paar CAD Programme auf meinem Home PC, und zwei CAM Programme anprobiert, aber nur oberflächlich. Im Augenblick habe ich einen Fokus auf die GRBL Platine. Vielleicht lass ich das erstmal und versuche jetzt mit einem PC zu arbeiten.
Gruß
Andreas
Zur CT: Irgendwie hätte ich den CT Leuten solch ein dickfälliges Verhalten nicht zu getraut. Da haben die eine schwermagelhafte Firmware und das preissen die an wie frisches Brot.
Du hast schon einen PC angeschlossen? Was läuft darauf? Kann man die Belegung des LTP, also den DB25 bei CAM Programmen frei wählen?
Ich habe bisher nur ein paar CAD Programme auf meinem Home PC, und zwei CAM Programme anprobiert, aber nur oberflächlich. Im Augenblick habe ich einen Fokus auf die GRBL Platine. Vielleicht lass ich das erstmal und versuche jetzt mit einem PC zu arbeiten.
Gruß
Andreas
Zur CT: Irgendwie hätte ich den CT Leuten solch ein dickfälliges Verhalten nicht zu getraut. Da haben die eine schwermagelhafte Firmware und das preissen die an wie frisches Brot.
hallo andreas,
laptop war/ist dran, um den grbl-controller mit gcode zu füttern. ich benutz dazu universal-gcode-sender.
wenn du komplett ohne die grbl-platine testen willst, dann zum beispiel mit linuxcnc. gibt es auch als live-cd.
siehe weiter oben im thread, den tip hatte ich auch schon bekommen.
da kannst du die pinbelegung komplett frei festlegen, ich hab mich damit aber auch nicht im detail beschäftigt. ich wollte nur mal die verkabelung und drehrichtung der motoren testen und bei mir hat eine standard-config funktioniert.
was die ct angeht, geb ich dir komplett recht. support hätte ich auch besser erwartet. da wäre man besser dran gewesen, sie wären beim orginal grbl-geblieben, dann hätte man wenigstens eine community und updates.
vg
tom
laptop war/ist dran, um den grbl-controller mit gcode zu füttern. ich benutz dazu universal-gcode-sender.
wenn du komplett ohne die grbl-platine testen willst, dann zum beispiel mit linuxcnc. gibt es auch als live-cd.
siehe weiter oben im thread, den tip hatte ich auch schon bekommen.
da kannst du die pinbelegung komplett frei festlegen, ich hab mich damit aber auch nicht im detail beschäftigt. ich wollte nur mal die verkabelung und drehrichtung der motoren testen und bei mir hat eine standard-config funktioniert.
was die ct angeht, geb ich dir komplett recht. support hätte ich auch besser erwartet. da wäre man besser dran gewesen, sie wären beim orginal grbl-geblieben, dann hätte man wenigstens eine community und updates.
vg
tom
und bei mir hat eine standard-config funktioniert.
universal-gcode-sender
universal-gcode-sender
ich habe mir einen alten rechner unterm Tisch vorgezogen. UBUNTU 10.x ist recht moderat bezüglich der Hardware und es läuft recht flott auf dem alten AMD Rechner. Welche Standard Config hast du denn genommen?
Der universal-gcode-sender ist java software
. Kenn ich mich nicht so gut aus. Hatte vor Jahren mal eine Grundeinweisung in der Firma. Betreibst du es auch unter Linux?Ich wollte mir in den nächsten Tagen die Fräse bestellen. Ich wollte die Kress nehmen. Welche benutzt du?
Gruß
Andreas
hallo andreas,
das war glaube ich die "default-stepper-mm".
hab das alte laptop jetzt gerade nicht zur hand, um nachzuschauen.
was den universal-gcodesender angeht, ist das ja ziemlich egal, in was der programmiert ist, so ist er wenigstens plattformübergreifend. hab ihn schon unter windows und linux benutzt. funktioniert beides, die serielle schnittstelle heißt halt betriebssystembedingt anderst. mit java hast du da relativ wenig berührungspunkte, ausser dass du halt eine jre installieren musst.
ansonsten ist das ja auch nur anwendung starten.
bei linux musste man glaube ich noch mitglied der gruppe 'modem" sein, damit man zugriff auf die serielle hat, bin ich mir aber nicht mehr ganz sicher.
alternativ gibts noch http://zapmaker.org/projects/grbl-controller-3-0/, wobei der bei mir nicht so gut lief.
was die frässpindel angeht, hab ich auch die kress.
vg
tom
das war glaube ich die "default-stepper-mm".
hab das alte laptop jetzt gerade nicht zur hand, um nachzuschauen.
was den universal-gcodesender angeht, ist das ja ziemlich egal, in was der programmiert ist, so ist er wenigstens plattformübergreifend. hab ihn schon unter windows und linux benutzt. funktioniert beides, die serielle schnittstelle heißt halt betriebssystembedingt anderst. mit java hast du da relativ wenig berührungspunkte, ausser dass du halt eine jre installieren musst.
ansonsten ist das ja auch nur anwendung starten.
bei linux musste man glaube ich noch mitglied der gruppe 'modem" sein, damit man zugriff auf die serielle hat, bin ich mir aber nicht mehr ganz sicher.
alternativ gibts noch http://zapmaker.org/projects/grbl-controller-3-0/, wobei der bei mir nicht so gut lief.
was die frässpindel angeht, hab ich auch die kress.
vg
tom
hallo andreas,
das war glaube ich die "default-stepper-mm".
hab das alte laptop jetzt gerade nicht zur hand, um nachzuschauen.
was den universal-gcodesender angeht, ist das ja ziemlich egal, in was der programmiert ist, so ist er wenigstens plattformübergreifend. hab ihn schon unter windows und linux benutzt. funktioniert beides, die serielle schnittstelle heißt halt betriebssystembedingt anderst. mit java hast du da relativ wenig berührungspunkte, ausser dass du halt eine jre installieren musst.
ansonsten ist das ja auch nur anwendung starten.
bei linux musste man glaube ich noch mitglied der gruppe 'modem" sein, damit man zugriff auf die serielle hat, bin ich mir aber nicht mehr ganz sicher.
alternativ gibts noch http://zapmaker.org/projects/grbl-controller-3-0/, wobei der bei mir nicht so gut lief.
was die frässpindel angeht, hab ich auch die kress.
vg
tom
das war glaube ich die "default-stepper-mm".
hab das alte laptop jetzt gerade nicht zur hand, um nachzuschauen.
was den universal-gcodesender angeht, ist das ja ziemlich egal, in was der programmiert ist, so ist er wenigstens plattformübergreifend. hab ihn schon unter windows und linux benutzt. funktioniert beides, die serielle schnittstelle heißt halt betriebssystembedingt anderst. mit java hast du da relativ wenig berührungspunkte, ausser dass du halt eine jre installieren musst.
ansonsten ist das ja auch nur anwendung starten.
bei linux musste man glaube ich noch mitglied der gruppe 'modem" sein, damit man zugriff auf die serielle hat, bin ich mir aber nicht mehr ganz sicher.
alternativ gibts noch http://zapmaker.org/projects/grbl-controller-3-0/, wobei der bei mir nicht so gut lief.
was die frässpindel angeht, hab ich auch die kress.
vg
tom
irgendwie klemmts da bei mir. Ich bekomme den GCodeSender nicht kompiliert. Ich finde im Stammverzeichnis des Gcode Ordners kein Jar file. Der Ordner Relais_files hat eine Start-windows.bat mit dem Inhalt "java -jar -Xmx256m UniversalGcodeSender.jar"
. Installiert habe ich Jdk 8. im ganzen Ordner gibt es keine Datei "UniversalGcodeSender.jar".
In der readme steht "o run simply unzip the .zip file and double click the .jar file.
On some platforms you will need to run an included start script." Das eine finde ich nicht das andere Funktioniert nicht.
Gruß
Andreas
also du hast dieses zip-file runtergeladen, oder?
(ich glaub du bist auf der richtigen seite, musst nur ein bischen runterscrollen. gibts die version 1.0.6 und 1.0.7)
http://bit.ly/1dNrLAy
da ist das jar file mit drin.
dann einmal kurz auf der console prüfen, ob dein java richtig installiert ist
sollte was sinnvolles ausspucken.
dann klappt auch die die start-windows.bat
mit was generierst du denn deinen gcode?
viel erfolg
tom
(ich glaub du bist auf der richtigen seite, musst nur ein bischen runterscrollen. gibts die version 1.0.6 und 1.0.7)
http://bit.ly/1dNrLAy
da ist das jar file mit drin.
dann einmal kurz auf der console prüfen, ob dein java richtig installiert ist
Code:
java -versiondann klappt auch die die start-windows.bat
mit was generierst du denn deinen gcode?
viel erfolg
tom
Danke für den link. Mein Zip file heißt: Universal-G-Code-Sender-master.zip. Ist wohl ein Entwickler File mit allen Sourcen. Java -version spukt genau aus was ich installiert habe, allerdings sehe ich nur die Runtime . Trotzdem es funktioniert. GCode generieren habe ich mir noch keine gedanken gemacht. Was nutzt du ?
Wozu braucht du genau deine Fräse?
Ich möchte endlich Rippen und andere Teile für meine Modellflugzeuge bauen die genau passen oder dem Profil entsprechen, das z.B. ein zweiter Flügel genau wird wie der erste. Mit FPV habe ich eigentlich nichts vor. Sicher habe ich an mein Model mal eine Kamera angeklebt, aber das ich zeitgleich sehen kann noch nicht. Ich denke da gehts auch ins Geld. Betreibst du FPV?
Erstmal noch ein Danke für deine Hilfe.
Gruß
Andreas
. Trotzdem es funktioniert. GCode generieren habe ich mir noch keine gedanken gemacht. Was nutzt du ?Wozu braucht du genau deine Fräse?
Ich möchte endlich Rippen und andere Teile für meine Modellflugzeuge bauen die genau passen oder dem Profil entsprechen, das z.B. ein zweiter Flügel genau wird wie der erste. Mit FPV habe ich eigentlich nichts vor. Sicher habe ich an mein Model mal eine Kamera angeklebt, aber das ich zeitgleich sehen kann noch nicht. Ich denke da gehts auch ins Geld. Betreibst du FPV?
Erstmal noch ein Danke für deine Hilfe.
Gruß
Andreas
hallo andreas,
für die ersten tests hab ich estlcam genommen und werd das wohl auch kaufen.
was günstigeres wird man kaum finden und es deckt vermutlich alles und noch mehr ab, was man im hobbybereich so braucht.
vorallem ist die bedienung ziemlich selbsterklärend.
fpv hab ich alle komponenten schon zu hause, find aber gerade keine zeit zum weitermachen. bin aber auch erst letztes jahr wieder zum modellbau gekommen und da hat sich seit meiner jugend doch ein bischen was getan
abgesehen davon muss ich erstmal rauskriegen, warum mein copter momentan nicht das macht, was er soll, bevor die kamera dran kommt.
dann bring deine fräse mal zum laufen. auf die ersten teile ist man zumindest ziemlich stolz, auch wenn's nur spannpratzen oder ähnliches sind.
vg
tom
für die ersten tests hab ich estlcam genommen und werd das wohl auch kaufen.
was günstigeres wird man kaum finden und es deckt vermutlich alles und noch mehr ab, was man im hobbybereich so braucht.
vorallem ist die bedienung ziemlich selbsterklärend.
fpv hab ich alle komponenten schon zu hause, find aber gerade keine zeit zum weitermachen. bin aber auch erst letztes jahr wieder zum modellbau gekommen und da hat sich seit meiner jugend doch ein bischen was getan
abgesehen davon muss ich erstmal rauskriegen, warum mein copter momentan nicht das macht, was er soll, bevor die kamera dran kommt.
dann bring deine fräse mal zum laufen. auf die ersten teile ist man zumindest ziemlich stolz, auch wenn's nur spannpratzen oder ähnliches sind.
vg
tom
Moin Tom,
Estlcam ist schon gut. Ich habe es ausprobiert und finde mich damit schon recht gut zurecht. LINUXCNC startet nur mit Fehlermeldungen und bricht dann ab. Eine vernüftige Konfiguration habe ich noch nicht, da muss ich mich durchs Handbuch lesen. Die haben ja eine kurzfassung von 72 Seiten. Das Linux selber läuft schon flüssig auf der alten Kiste.
Es gibt viel zu tun, warten wir´s ab. ;-)
Gruß
Andreas
Estlcam ist schon gut. Ich habe es ausprobiert und finde mich damit schon recht gut zurecht. LINUXCNC startet nur mit Fehlermeldungen und bricht dann ab. Eine vernüftige Konfiguration habe ich noch nicht, da muss ich mich durchs Handbuch lesen. Die haben ja eine kurzfassung von 72 Seiten. Das Linux selber läuft schon flüssig auf der alten Kiste.
Es gibt viel zu tun, warten wir´s ab. ;-)
Gruß
Andreas
Hallo Tom,
auf meinem Linux PC ist ein autoupdate auf die ubuntu Version durchgelaufen. Tja, das darf nicht passieren. Ich habs neu installiert und Autoupdate deaktiviert.
Meine fräse läuft zur Zeit an meinem Win7 Nootebook. Es funktioniert soweit mit GC0de Sender gut.
Eine Bitte habe ich noch. Ich versuche auf dem linux PC die Java Runtime zu installieren. Ich bekomme mit den Sun Paketen aber immer Abhänigkeiten gemeldet (sogar mit .deb die für Ubuntu zur Verfügung stehen, aber wahrscheinlich für neuere version) die ich nicht auflösen kann. Welche Java Runtime verwendest du?
Gruß
Andreas
Edit: Eine Frage gelöscht. Hat sich erledigt.
auf meinem Linux PC ist ein autoupdate auf die ubuntu Version durchgelaufen. Tja, das darf nicht passieren. Ich habs neu installiert und Autoupdate deaktiviert.
Meine fräse läuft zur Zeit an meinem Win7 Nootebook. Es funktioniert soweit mit GC0de Sender gut.
Eine Bitte habe ich noch. Ich versuche auf dem linux PC die Java Runtime zu installieren. Ich bekomme mit den Sun Paketen aber immer Abhänigkeiten gemeldet (sogar mit .deb die für Ubuntu zur Verfügung stehen, aber wahrscheinlich für neuere version) die ich nicht auflösen kann. Welche Java Runtime verwendest du?
Gruß
Andreas
Edit: Eine Frage gelöscht. Hat sich erledigt.
Zuletzt bearbeitet:
Eine Bitte habe ich noch. Ich versuche auf dem linux PC die Java Runtime zu installieren. Ich bekomme mit den Sun Paketen aber immer Abhänigkeiten gemeldet (sogar mit .deb die für Ubuntu zur Verfügung stehen, aber wahrscheinlich für neuere version) die ich nicht auflösen kann. Welche Java Runtime verwendest du?
ich habe gerade deine Frage gelesen.
Welche Ubuntu Verison setzt du ein?
Ich selbst nutze Mint 15 bzw. 17 (Basiert auf Ubuntu) und bei beiden Version funktioniert der UniversalGcodeSender sehr gut.
Im Verzeichniss gibt es eine start.sh, die must du ausführbar machen.
Meine Java Version:
java -version
java version "1.7.0_65"
OpenJDK Runtime Environment (IcedTea 2.5.1) (7u65-2.5.1-4ubuntu1~0.14.04.1)
OpenJDK 64-Bit Server VM (build 24.65-b04, mixed mode)
Gruß
HolzWurmDau
Hallo,
@Bastel_Wastel Beitrag Nr: 24
ich hatte am Anfang auch Probleme mit der grbl-jog Platine vom CT Verlag.
Nach dem ich eine neuer Firmware eingespielt habe. Funktioniert das Einschalten mit dem Reset sehr gut.
Allerdings läuft meine Z-Achse auf dem Jog-Pad falsch herum, der Auf Taster ist die Down-Richtung und umgekehrt.
@Bastel_Wastel Beitrag Nr: 24
ich hatte am Anfang auch Probleme mit der grbl-jog Platine vom CT Verlag.
Nach dem ich eine neuer Firmware eingespielt habe. Funktioniert das Einschalten mit dem Reset sehr gut.
Allerdings läuft meine Z-Achse auf dem Jog-Pad falsch herum, der Auf Taster ist die Down-Richtung und umgekehrt.

