
FrSky S6R Empfänger mit 3 Achsen-Gyro & 3 Achsen-Beschleunigungssensor für Flugzeuge
- Themenstarter helle
- Beginndatum
- Status
- Nicht offen für weitere Antworten.


Super Sache! Danke fürs Teilen Bernd!
Ich hab heute nochmal einen Versuch gestartet und bin mal wieder gescheitert...das Skript bricht bei der Konfiguration der Lage des Empfängers "Turn S6R Left" ab. Dann stehen im Skript nur noch ---- und ich muss den Empfänger neu starten um wieder Werte angezeigt zu bekommen.
Hat bestimmt auch folgendes mit zu tun: Wenn ich alles nach Plan anklemme, kann ich nur den Motor steuern, QR und HR haben keine Funktion, deaktiviere ich die Funktionen des S6R, habe ich Kontrolle über nur über 1 von 2 QR. HR und Motor werden normal angesprochen. Das zweite QR ist korrekt angeschlossen, würde sich ggf jemand meine Modell-Datei ansehen? Sollte aber ok sein. https://dl.dropboxusercontent.com/u/62640547/s6r.eepe
Zu der ganzen Konfiguration habe ich eine Frage: Wenn mein S6R eingebaut ist, hängt er kopfüber unter der Tragfläche mit den Anschlüssen in Flugrichtung. In der Konfigurationprozedur: "Turn S6R right...up...down" ist damit die Lage des Modells oder tatsächlich die Lage des S6R gemeint?
Danke,
Lars
Ich hab heute nochmal einen Versuch gestartet und bin mal wieder gescheitert...das Skript bricht bei der Konfiguration der Lage des Empfängers "Turn S6R Left" ab. Dann stehen im Skript nur noch ---- und ich muss den Empfänger neu starten um wieder Werte angezeigt zu bekommen.
Hat bestimmt auch folgendes mit zu tun: Wenn ich alles nach Plan anklemme, kann ich nur den Motor steuern, QR und HR haben keine Funktion, deaktiviere ich die Funktionen des S6R, habe ich Kontrolle über nur über 1 von 2 QR. HR und Motor werden normal angesprochen. Das zweite QR ist korrekt angeschlossen, würde sich ggf jemand meine Modell-Datei ansehen? Sollte aber ok sein. https://dl.dropboxusercontent.com/u/62640547/s6r.eepe
Zu der ganzen Konfiguration habe ich eine Frage: Wenn mein S6R eingebaut ist, hängt er kopfüber unter der Tragfläche mit den Anschlüssen in Flugrichtung. In der Konfigurationprozedur: "Turn S6R right...up...down" ist damit die Lage des Modells oder tatsächlich die Lage des S6R gemeint?
Danke,
Lars
Anhänge
-
 1,4 MB Aufrufe: 43
1,4 MB Aufrufe: 43
Hi,
diese Ausrichtung wird definitiv NICHT unterstützt,
Der Empfänger muss auf jeden Fall so montiert werden, dass die Stirnseite in Flugrichtung und die Steckerleiste nach hinten zeigt.
siehe roter Pfeil !

mit "mounting type" kann man lediglich bestimmen auf welcher "Seitenfläche" der Empfänger liegt.
diese Ausrichtung wird definitiv NICHT unterstützt,
Der Empfänger muss auf jeden Fall so montiert werden, dass die Stirnseite in Flugrichtung und die Steckerleiste nach hinten zeigt.
siehe roter Pfeil !
mit "mounting type" kann man lediglich bestimmen auf welcher "Seitenfläche" der Empfänger liegt.
Alles Klar, vielen Dank für den Hinweis!
Das FrSky STK Ding ist in diesem Moment in Zustellung. Mit Glück ist der Nachbar daheim, dann kommen heute Abend die Fotos.
Hoffe es Klappt dann alles. Vorallem kann ich das Modell direkt mit der Horus bekannt machen, bin ja dann nicht mehr auf das Skript angewiesen...oder?
Das FrSky STK Ding ist in diesem Moment in Zustellung. Mit Glück ist der Nachbar daheim, dann kommen heute Abend die Fotos.
Hoffe es Klappt dann alles. Vorallem kann ich das Modell direkt mit der Horus bekannt machen, bin ja dann nicht mehr auf das Skript angewiesen...oder?
Alles Klar, vielen Dank für den Hinweis!
Das FrSky STK Ding ist in diesem Moment in Zustellung. Mit Glück ist der Nachbar daheim, dann kommen heute Abend die Fotos.
Hoffe es Klappt dann alles. Vorallem kann ich das Modell direkt mit der Horus bekannt machen, bin ja dann nicht mehr auf das Skript angewiesen...oder?
Das FrSky STK Ding ist in diesem Moment in Zustellung. Mit Glück ist der Nachbar daheim, dann kommen heute Abend die Fotos.
Hoffe es Klappt dann alles. Vorallem kann ich das Modell direkt mit der Horus bekannt machen, bin ja dann nicht mehr auf das Skript angewiesen...oder?
http://www.rcgroups.com/forums/showpost.php?p=35826748&postcount=39
Was ich da seh, ist der CP2102 für den USB UART, dann auf der Rückseite ein SIPEX 3232 (RS-232 Transceiver). Aber dann das "fette" Teil. Gefällt mir nicht

Hab mir jetzt auch den Frsky STK bestellt.
Gruß KH
Jepp, ich denke ich warte bis es den STick auch bei Banggood gibt und die 2.2 raus ist.
Ist mir momentan zu fummelig alles ;_)
Ist mir momentan zu fummelig alles ;_)
Hab gedacht, bisserl was zu einem FTDI oder CP2102, und die Schnittstelle zum Konfigurieren ist da, aber da ist dieser Microcontroller mit drauf ....
Man könnte doch bestimmt ein Script schreiben, welches den Winkel nach Hause aus der Startposition und aktuellen Position des Flugzeuges berechnet und damit dann eine Kurvenkorrektur veranlasst wird. Man muss ja eigentlich nur das Flugzeug in eine leichte Kurve bringen, stabilisieren tut der Empfänger ja weiter nehme ich an. Wenn man also keinen Failsafe Autopilot braucht könnte man die Taranis als Autopilot nutzen.
Wegpunkte abfliegen sollte so auch gehen, solange man sich im Sendebereich der Taranis befindet.
Man bräuchte dann nur nen kleinen Arduino mit GPS, der ein Telemetriesignal erzeugt, oder eben das original Frsky GPS.
Wegpunkte abfliegen sollte so auch gehen, solange man sich im Sendebereich der Taranis befindet.
Man bräuchte dann nur nen kleinen Arduino mit GPS, der ein Telemetriesignal erzeugt, oder eben das original Frsky GPS.
Zuletzt bearbeitet:
@Bernd:
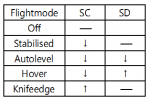
Yepp, Messerflug geht beim S6R nur über die eine Fläche,
mal sehen wann die die 2. Variante auch rausbringen.
... und mal geloggt wie sich der S6R auf die Phygoiden auswirkt ?
@Kustom
Der Tscheche ist mittlerweile einer meiner beiden favorisierten Händler.
Macht auch einen sehr guten support.
Gruß
Udo
Yepp, Messerflug geht beim S6R nur über die eine Fläche,
mal sehen wann die die 2. Variante auch rausbringen.
... und mal geloggt wie sich der S6R auf die Phygoiden auswirkt ?
@Kustom
Der Tscheche ist mittlerweile einer meiner beiden favorisierten Händler.
Macht auch einen sehr guten support.
Gruß
Udo
@Bernd:
Yepp, Messerflug geht beim S6R nur über die eine Fläche,
mal sehen wann die die 2. Variante auch rausbringen.
... und mal geloggt wie sich der S6R auf die Phygoiden auswirkt ?
Yepp, Messerflug geht beim S6R nur über die eine Fläche,
mal sehen wann die die 2. Variante auch rausbringen.
... und mal geloggt wie sich der S6R auf die Phygoiden auswirkt ?
Ich hoffe ja noch auf ein automatisches Einschalten der Stabilisierungen mit Hilfe der Fluglage und der Auswertung der Knüppel. In Messerflug drehen, Querruder neutral --> Stabilisieren
Hochziehen, Höhe neutral, Gas in einem definierten Bereich --> Stabilisieren
Für Leute mit Handicap bei der Auge - Hand - Koordination (aka Segelflieger) wäre das perfekt.
Gruß Bernd
Ich versteh es nicht: 2 Computer und das gleiche Problem (siehe Bild) Bekomme keine Verbindung mit dem STK zum S6R hin. Hat jemand ne Idee? Ich glaub, irgendetwas will verhindern, dass ich Spaß an Fläche-fliegen finde
Hat jemand ne Idee? Ich glaub, irgendetwas will verhindern, dass ich Spaß an Fläche-fliegen finde
Noch eine Frage: Der Modellwizzard im Compainon sagt ja, dass AIL1 das rechte Querruder ist, in der S6R Anleitung ist aber AIL1 das linke. Was ist denn richtig?
Hat jemand ne Idee? Ich glaub, irgendetwas will verhindern, dass ich Spaß an Fläche-fliegen finde Noch eine Frage: Der Modellwizzard im Compainon sagt ja, dass AIL1 das rechte Querruder ist, in der S6R Anleitung ist aber AIL1 das linke. Was ist denn richtig?
Anhänge
-
 70,7 KB Aufrufe: 42
70,7 KB Aufrufe: 42
Hi
stelle sicher dass der Schalter vom stick in der richtigen Position ist und das kabel am richtigen port.
Sollte beides ok sein:
nimm mal ein cutter messer und vergroesser das "Fenster" um den switch
evtl kann der nicht richtig durchschalten.
stelle sicher dass der Schalter vom stick in der richtigen Position ist und das kabel am richtigen port.
Sollte beides ok sein:
nimm mal ein cutter messer und vergroesser das "Fenster" um den switch
evtl kann der nicht richtig durchschalten.
- Status
- Nicht offen für weitere Antworten.

