Hallo Norbert, nach unserer Philosophie (das können wir aber gerne diskutieren) wird die Fluggeschwindigkeit beim Messflug von der Einstellung des Modells vorgegeben, also Schwerpunkt, Verwölbung und EWD. Unsere Aufgabe als Pilot ist es, das Modell zum konstanten Fliegen zu bringen, also die Phygoide auszusteuern. Wenn dann der Flug eine Zeitlang konstant ist, erfolgt die Messung der Leistungsparameter. Dann ändern wir die EWD und messen wieder. So bekommen wir die gewünschten Daten.
Du könntest zwar theoretisch auch die gewünschte TAS aussteuern, aber dann müssten wir auf konstantes Sinken prüfen, um Störungen zu erkennen. Nach derzeitiger Methode fliegt das Flugzeug ungesteuert, jede Störung von außen bewirkt, dass die Messung von selbst ungültig wird. Anders ausgedrückt, Sinken und TAS müssen beide konstant sein (innerhalb der Toleranz, ganz konstant geht es nur in der Theorie), nur dann ist die Messung gültig.
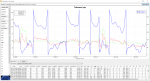
Das Prüfen auf konstantes Sinken hätte zusätzlich den Vorteil, dass man auch mit Groundspeed (GPS) messen kann, aber die Testflüge mit GPS waren extrem ernüchternd, selbst bei "Windstille" ist immer ein Einfluss da, das hat mit Messen nichts mehr zu tun, ein Herausrechnen des Windes ist eine Doktorarbeit in Physik (wenn es überhaupt möglich ist, ich glaube nicht):
Grün: Airspeed, Rot Groundspeed, Blau Heading (Flugrichtung)
Wenn man mit einem Flugcontroller den Gleitwinkel stabilisiert, machen wir im Prinzip auch das, was Du vorschlägst. Dieser Testflug steht aber noch aus. Die Mühle ist fertig ausgerüstet, ich warte nur noch aufs passende Wetter.

Die Umschaltung der Varioquelle im Flug kann OpenTX (noch) nicht, aber der openXsensor kann es. Wenn wir es mstrens vorschlagen und er eine Verbesserung erkennen kann, wird er es auch für den Airspeed umsetzen. Mein Vorschlag: Fliege mal den aktuellen Stand, es kann aber absolut sein, dass auch eine andere Strategie zum Ziel führt. Wichtig ist m.E. ein unbeschleunigter Flugzustand.
@Udo: Ein interessanter Ansatz zum Ermitteln der Modellpolare. Mein Ziel war ja erstmal nur, die Flugphasen zu optimieren. Du gehst damit einen Schritt weiter. Grundsätzlich haben wir alle Daten zur Verfügung. OpenTX ist sogar so nett, uns die Tabelle auszufüllen, wir brauchen diese dann nur noch auszuwerten. LUA ist gar nicht nötig. Um mit den Worten meines Fast-Nachbarn in Oggersheim zu sprechen: Wichtig ist, was hinten raus kommt
")
Edit: Ich nenne Udos Ansatz jetzt mal dynamische Methode: Man fliegt am Strömunsabriss und stellt einen konstanten Flug her. Dann wird die EWD langsam verringert (OpenTX kann das) und man logt Sinken und Airspeed. Diese dynamisch erflogene Polare vergleicht man dann mit ein paar herkömmlich (statische Methode) erflogenen Ankerpunkten, um zu sehen, ob es durch die dynamische Methode zu Abweichungen kommt.
Gruß Bernd