Hallo,
ich teste gerade einen Tarot 650 Sport mit T-Moror Antigravity MN4006-23 Motoren und T-Motor Antigravity 15x5 Faltpropeller.
Installiert ist eine Pixhawk 2.1 mit APM 3.5.7. Die Propeller sind ja laut T-Motor schon gewuchtet, würde dies auch gern mal kontrollieren, weiß allerdings keine Methode wie ich das mit dem DuBro Balancer machen könnte.
Die Pixhawk ist direkt auf den Ramen geschraubt, da die IMUs ja schon eine Dämpfung haben (von Profi-CNC wird auch empfohlen die Pix direkt zu verbauen).
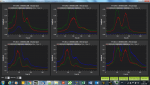
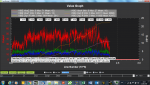
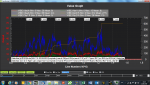
Wenn ich den Copter in der Hand halte, kann ich keine wirklichen Vibrationen feststellen, das Log sagt leider etwas anderes: Clipping Tertiary und Primary > 1000 ! - sowas hatte ich noch nie. Das Flugverhalten nach Autotune ist auch vollkommen in Ordnung.
Leider sind die Tarot Falt-Rahmen ja nicht so stabil gebaut und viele Leute haben Probleme mit Vibrationen und die neue Pixhawk ist aufgrund der Größe und Gewicht nicht zu der herkömmlichen Omnimac-Style Dämpfern kompatibel.
Ich bin für jeden Ratschlag dankbar bezüglich Vibrationsdämpfung solch eines Setups. Eventuell sind es ja doch auch die PID-Werte?Die größten Vibs sind auf der Z-Achse, deshalb werde ich demnächst mal gewuchtete T-Motor Carbon 15x5 (nicht Faltpropeller) testen, die müssen allerdings noch bestellt werden.
Log Datei (Auto Mission): 00000023.BIN
Grüße,
Lorenz
ich teste gerade einen Tarot 650 Sport mit T-Moror Antigravity MN4006-23 Motoren und T-Motor Antigravity 15x5 Faltpropeller.
Installiert ist eine Pixhawk 2.1 mit APM 3.5.7. Die Propeller sind ja laut T-Motor schon gewuchtet, würde dies auch gern mal kontrollieren, weiß allerdings keine Methode wie ich das mit dem DuBro Balancer machen könnte.
Die Pixhawk ist direkt auf den Ramen geschraubt, da die IMUs ja schon eine Dämpfung haben (von Profi-CNC wird auch empfohlen die Pix direkt zu verbauen).
Wenn ich den Copter in der Hand halte, kann ich keine wirklichen Vibrationen feststellen, das Log sagt leider etwas anderes: Clipping Tertiary und Primary > 1000 ! - sowas hatte ich noch nie. Das Flugverhalten nach Autotune ist auch vollkommen in Ordnung.
Leider sind die Tarot Falt-Rahmen ja nicht so stabil gebaut und viele Leute haben Probleme mit Vibrationen und die neue Pixhawk ist aufgrund der Größe und Gewicht nicht zu der herkömmlichen Omnimac-Style Dämpfern kompatibel.
Ich bin für jeden Ratschlag dankbar bezüglich Vibrationsdämpfung solch eines Setups. Eventuell sind es ja doch auch die PID-Werte?Die größten Vibs sind auf der Z-Achse, deshalb werde ich demnächst mal gewuchtete T-Motor Carbon 15x5 (nicht Faltpropeller) testen, die müssen allerdings noch bestellt werden.
Log Datei (Auto Mission): 00000023.BIN
Grüße,
Lorenz
Anhänge
-
 256,5 KB Aufrufe: 25
256,5 KB Aufrufe: 25 -
 257 KB Aufrufe: 23
257 KB Aufrufe: 23