Hallo zusammen,
ich fliege 3 Blättrige 9050 an 1000KV 2212 Motoren auf meinem F550.
Die erzeugen schon bauartbedingt weniger Jelly als die 2 Blättrigen (das könnt ihr in meinen Videos in Blog nachvollziehen). Aber darum soll es hier nicht gehen.
Die 3 Blättrigen statisch mittels Propeller-Waage zu wuchten ist ungleich schwerer und das Ergebniss könnte auch besser sein. Daher habe ich mir einiges zum dynamischen Wuchten angesehen und mich dazu Entschlossen es auch einmal zu versuchen.
Meine Erfahrungen werde ich dann hier schreiben.
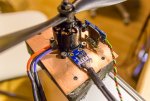
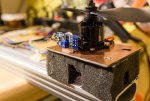
Mein Ansatz ist ein 3D Beschleunigungsmesser, direkt auf einer kleinen Platine (11,95€).

http://www.pollin.de/shop/dt/NjU4OTgxOTk-/Bausaetze_Module/Module/3_Achsen_Beschleunigungssensor_Modul.html
Und eine reflexions Lichtschranke.
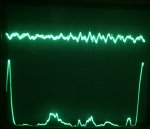
Das analoge x/y Signal werde ich auf ein 2-Strahl Osziloskop legen, das ich mittels der Lichtschranke trigger.
Ich möchte auch nicht nur den Propeller Wuchten, sondern auch gleichzeitig den Motor, denn auch hier scheint es mit der Qualität nicht immer gut bestellt zu sein.
Grüße Jörg
ich fliege 3 Blättrige 9050 an 1000KV 2212 Motoren auf meinem F550.
Die erzeugen schon bauartbedingt weniger Jelly als die 2 Blättrigen (das könnt ihr in meinen Videos in Blog nachvollziehen). Aber darum soll es hier nicht gehen.
Die 3 Blättrigen statisch mittels Propeller-Waage zu wuchten ist ungleich schwerer und das Ergebniss könnte auch besser sein. Daher habe ich mir einiges zum dynamischen Wuchten angesehen und mich dazu Entschlossen es auch einmal zu versuchen.
Meine Erfahrungen werde ich dann hier schreiben.
Mein Ansatz ist ein 3D Beschleunigungsmesser, direkt auf einer kleinen Platine (11,95€).
http://www.pollin.de/shop/dt/NjU4OTgxOTk-/Bausaetze_Module/Module/3_Achsen_Beschleunigungssensor_Modul.html
Und eine reflexions Lichtschranke.
Das analoge x/y Signal werde ich auf ein 2-Strahl Osziloskop legen, das ich mittels der Lichtschranke trigger.
Ich möchte auch nicht nur den Propeller Wuchten, sondern auch gleichzeitig den Motor, denn auch hier scheint es mit der Qualität nicht immer gut bestellt zu sein.
Grüße Jörg
Zuletzt bearbeitet:



") Was für eine Fotodiode nimmst du als trigger?
Was für eine Fotodiode nimmst du als trigger?