Hallo zusammen
Ich will hier mal die nächste Woche(en) den Bau meines Tricopters beschreiben.
Erstmall will ich sagen, dass ich noch nicht sooo viel Erfahrung im Modellbau habe, aber es hat mir schon immer Spaß gemacht Irgendwelche fahrenden oder fliegenden Teile selbst zu bauen. Davor habe ich erst einen MultiWii Quadrocopter gebaut mit Standard Frame und Aluvierkantrohren. Der flog ja schon ganz gut und so wollte ich mal was " wertigeres " bauen. Das ist also auch das erste mal, dass ich überhaupt was mit Carbon und GFK mache. Die ganzen Teile hat mir zum teil mein Vater gesponsort, zum anderen teil gehe ich dafür Kellnern") .
.
Also hier mal die Teileliste.
Motor: T-Motor MT2814 770KV
Propeller: 11"x5 GF E-Propeller Set Schwarz 4 Stück 2 CW 2 CC
Armschellen: FCP HL Armschellen 16mm Centerplate Seite und FCP HL Armschellen 16mm Motorseite
ESC: Flyduino NFET (HEXFET) 20A ESC SimonK Firmware
FC: CriusSe MultiWii
Zur Hauptplatte:
Erstmal hab ich mir die Schülerversion von AutoCAD runtergeladen und hab Angefangen zu Zeichen. ( Der Vorteil wenn man auf einem Gymnasium mit Kunstzug ist, dass man das Zeichnen am PC beigebracht bekommt )
Bei dem ganzen Aufbau habe ich mich bei dem Tricopter von r0sewhite " orientiert ". ( http://fpv-community.de/showthread.php?2510-Baubericht-eines-Tricopter )
Am Ende ist dann diese Grundplatte herausgekommen :
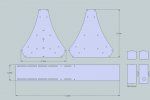
Hab dann jemanden gefunden der mir das in 1,5 mm Carbon ausfräst und mir zusendet. Die Teile werden wohl zwischen 7-11.1.2013 kommen.
Die Arme:
Die Arme haben einen Durchmesser von 16 mm und sind aus GFK mit einer Wandstärke von 1 mm.

Für den Drehmechanismus wird ein GFK Rohr mir einem Durchmesser von 8 mm in dem hinteren Arm kugelgelagert und der Servo sitzt in der Mitte des Frames.

Baubeginn 3. Januar
Ein 16 mm Rohr wurde in der Hälfte durchgesägt sodass die beiden vorderen Arme eine Länge von 50 cm haben.
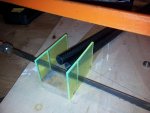
In das 8 mm Rohr wurde am Ende eine Öffnung gefräst durch die man später die Kabel führen kann.


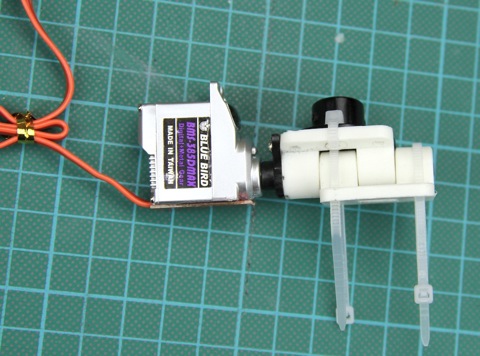
Um das Rohr anlenken zu können wurde aus einem Servohorn ein " Stutzen " gefräst der in das Rohr geklebt wird
um den Servo direkt draufzustecken.


Das Kugellager wurde einfach so draufgeschoben, wird aber am Ende noch mit Epoxydharz fixiert.
Morgen sollten die Sachen von Flyduino kommen, dann kann die Anlenkung fertig gemacht werden.
Die Kugellager sind diese hier: http://www.conrad.de/ce/de/product/...edium=seosite&utm_campaign=link&WT.mc_id=epro
Als Servo kommt das hier: http://www.conrad.de/ce/de/product/...-DMH-Doppelt-kugelgelagert-Getriebe-Metall-JR
Morgen gehts weiter
21.01.2013
!!!! Haha glaubst du wohl !!!!
Da ich gerade echt viel Stress in der Schule habe ( 1 Jahr vor der Kursstufe) gehts halt etwas langsamer vorran.
Der drehbare Arm wurde jetzt mit den Kugellagern bestückt. Dazu muste ich die 8 mm Stange ein klein wenig anfeilen, sonst hätte man die da nicht draufbekommen.

Hier sieht man das Stück Rohr auf dem der Motor sitzt, dass dann mit der Stange auf der die Kugellager sitzen verbunden wurde.
Dazu habe ich die Kugellager einfach als Abstandshalter benutzt. Durch beide Rohre wurde ein dünnes Loch gebohrt, durch das dann ein Stück Stahldraht geschoben wurde. So sitzt alles Bombenfest.


Hauptframe und Servobefestigung
Als endlich die Carbon Frästeile kamen konnte ich es nicht glaube. Ich hatte noch nie so perfekt passende Teile gesehen. Ich glaube in Zukunft will Ich nicht mehr auf so einen Luxus verzichten
Hier die zwei Hauptplatten:


Das Problem bei der Servobefestigung ist, dass das Servo auf der exakten Höhe zu zur Drehachse des Motors sein muss.
Dazu habe ich mir zusätzlich aus 2,5 mm Carbon so was wie eine "universelle" Halterung ausgedacht.
Unter das Servo werden einfach so viele Platten gelegt, bis das Servo auf der richtigen Höhe ist. In meinem habe ich die 2,5 mm Stärke genommen, weil ich damit genau auf die richtige Höhe komme.
Das Servo wird von einem Bügel mit zwei langen Schrauben nach unten gedrückt.



Das ich mir ja zuerst aus einem alten Servohorn eine Anlenkung gemacht habe, die direkt hinten auf das "Drehrohr" geklebt wird musste ich umdenken als nicht die Verklebung sondern das Plastikteil an sich, sich einfach abgedreht hatte. Da das teure Epoxidharz ja gehalten hatte, machte ich einfach die Halterung direkt daraus. Ich hab mir einfach ein anderes Servo mit der gleichen Größe genommen, und habe das Rohr mit Epoxidharz aufgefüllt. Nachdem das Harz trocken war, konnte man das Servo wieder herausziehen und man hatte eine extrem feste Verzahnung im Rohr.

Die Regler wurden mit Kabelbindern in den dafür vorhergesehenen Schlitzen befestigt. Da ich alles davor ganz gut ausgemessen hatte, passt des ganz gut

Ich versuch mich die Woche noch ans löten machen zu können
LG Jan
Ich will hier mal die nächste Woche(en) den Bau meines Tricopters beschreiben.
Erstmall will ich sagen, dass ich noch nicht sooo viel Erfahrung im Modellbau habe, aber es hat mir schon immer Spaß gemacht Irgendwelche fahrenden oder fliegenden Teile selbst zu bauen. Davor habe ich erst einen MultiWii Quadrocopter gebaut mit Standard Frame und Aluvierkantrohren. Der flog ja schon ganz gut und so wollte ich mal was " wertigeres " bauen. Das ist also auch das erste mal, dass ich überhaupt was mit Carbon und GFK mache. Die ganzen Teile hat mir zum teil mein Vater gesponsort, zum anderen teil gehe ich dafür Kellnern
. Also hier mal die Teileliste.
Motor: T-Motor MT2814 770KV
Propeller: 11"x5 GF E-Propeller Set Schwarz 4 Stück 2 CW 2 CC
Armschellen: FCP HL Armschellen 16mm Centerplate Seite und FCP HL Armschellen 16mm Motorseite
ESC: Flyduino NFET (HEXFET) 20A ESC SimonK Firmware
FC: CriusSe MultiWii
Zur Hauptplatte:
Erstmal hab ich mir die Schülerversion von AutoCAD runtergeladen und hab Angefangen zu Zeichen. ( Der Vorteil wenn man auf einem Gymnasium mit Kunstzug ist, dass man das Zeichnen am PC beigebracht bekommt
)Bei dem ganzen Aufbau habe ich mich bei dem Tricopter von r0sewhite " orientiert ". ( http://fpv-community.de/showthread.php?2510-Baubericht-eines-Tricopter )
Am Ende ist dann diese Grundplatte herausgekommen :
Hab dann jemanden gefunden der mir das in 1,5 mm Carbon ausfräst und mir zusendet. Die Teile werden wohl zwischen 7-11.1.2013 kommen.
Die Arme:
Die Arme haben einen Durchmesser von 16 mm und sind aus GFK mit einer Wandstärke von 1 mm.
Für den Drehmechanismus wird ein GFK Rohr mir einem Durchmesser von 8 mm in dem hinteren Arm kugelgelagert und der Servo sitzt in der Mitte des Frames.
Baubeginn 3. Januar
Ein 16 mm Rohr wurde in der Hälfte durchgesägt sodass die beiden vorderen Arme eine Länge von 50 cm haben.
In das 8 mm Rohr wurde am Ende eine Öffnung gefräst durch die man später die Kabel führen kann.
Um das Rohr anlenken zu können wurde aus einem Servohorn ein " Stutzen " gefräst der in das Rohr geklebt wird
um den Servo direkt draufzustecken.
Das Kugellager wurde einfach so draufgeschoben, wird aber am Ende noch mit Epoxydharz fixiert.
Morgen sollten die Sachen von Flyduino kommen, dann kann die Anlenkung fertig gemacht werden.
Die Kugellager sind diese hier: http://www.conrad.de/ce/de/product/...edium=seosite&utm_campaign=link&WT.mc_id=epro
Als Servo kommt das hier: http://www.conrad.de/ce/de/product/...-DMH-Doppelt-kugelgelagert-Getriebe-Metall-JR
Morgen gehts weiter
21.01.2013
!!!! Haha glaubst du wohl
!!!!Da ich gerade echt viel Stress in der Schule habe ( 1 Jahr vor der Kursstufe) gehts halt etwas langsamer vorran.
Der drehbare Arm wurde jetzt mit den Kugellagern bestückt. Dazu muste ich die 8 mm Stange ein klein wenig anfeilen, sonst hätte man die da nicht draufbekommen.
Hier sieht man das Stück Rohr auf dem der Motor sitzt, dass dann mit der Stange auf der die Kugellager sitzen verbunden wurde.
Dazu habe ich die Kugellager einfach als Abstandshalter benutzt. Durch beide Rohre wurde ein dünnes Loch gebohrt, durch das dann ein Stück Stahldraht geschoben wurde. So sitzt alles Bombenfest.
Hauptframe und Servobefestigung
Als endlich die Carbon Frästeile kamen konnte ich es nicht glaube. Ich hatte noch nie so perfekt passende Teile gesehen. Ich glaube in Zukunft will Ich nicht mehr auf so einen Luxus verzichten
Hier die zwei Hauptplatten:
Das Problem bei der Servobefestigung ist, dass das Servo auf der exakten Höhe zu zur Drehachse des Motors sein muss.
Dazu habe ich mir zusätzlich aus 2,5 mm Carbon so was wie eine "universelle" Halterung ausgedacht.
Unter das Servo werden einfach so viele Platten gelegt, bis das Servo auf der richtigen Höhe ist. In meinem habe ich die 2,5 mm Stärke genommen, weil ich damit genau auf die richtige Höhe komme.
Das Servo wird von einem Bügel mit zwei langen Schrauben nach unten gedrückt.
Das ich mir ja zuerst aus einem alten Servohorn eine Anlenkung gemacht habe, die direkt hinten auf das "Drehrohr" geklebt wird musste ich umdenken als nicht die Verklebung sondern das Plastikteil an sich, sich einfach abgedreht hatte. Da das teure Epoxidharz ja gehalten hatte, machte ich einfach die Halterung direkt daraus. Ich hab mir einfach ein anderes Servo mit der gleichen Größe genommen, und habe das Rohr mit Epoxidharz aufgefüllt. Nachdem das Harz trocken war, konnte man das Servo wieder herausziehen und man hatte eine extrem feste Verzahnung im Rohr.
Die Regler wurden mit Kabelbindern in den dafür vorhergesehenen Schlitzen befestigt. Da ich alles davor ganz gut ausgemessen hatte, passt des ganz gut
Ich versuch mich die Woche noch ans löten machen zu können
LG Jan
Zuletzt bearbeitet: