
Verbinden mit zweiter Empfänger X8R geht nicht
- Themenstarter Sn0west
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hab noch ein paar tests gemacht.
Ich glaube nun auch das weder der naze32 noch der x8r empfänger kapput sind. Warscheinlich ein setup Problem beim Naze32.
Als erstes habe ich das board komplet zurück gesetzt mit Defaults in der cli!
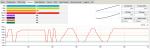
Ich glaube nun das es in der tat ein Verkabelung Problem ist. Beim empfänger Port 5-8 funktionieren einwandfrei.
Zwischen 1 und 4 da haperts und je nachdem was ich mache kommen unterschiedliche werte an.
Wenn ich zB. Strom und signal 1 im emfänher im Port 1 einstecke, dann habe ich auf ein stick drei werte gleichzeitig. ZB Rud,throttle und Ail die sich gleichzeitig bewegen. Yaw bleibt unberührt.
Ich glaube es liegt am gps, der im Moment nicht instaliert ist weil ich es noch nicht bekommen habe. Ich habs mal aktiviert und deaktiviert um den unterschied fest zu stellen aber da bin ich noch nicht weiter gekommen.
Ich glaube nun auch das weder der naze32 noch der x8r empfänger kapput sind. Warscheinlich ein setup Problem beim Naze32.
Als erstes habe ich das board komplet zurück gesetzt mit Defaults in der cli!
Ich glaube nun das es in der tat ein Verkabelung Problem ist. Beim empfänger Port 5-8 funktionieren einwandfrei.
Zwischen 1 und 4 da haperts und je nachdem was ich mache kommen unterschiedliche werte an.
Wenn ich zB. Strom und signal 1 im emfänher im Port 1 einstecke, dann habe ich auf ein stick drei werte gleichzeitig. ZB Rud,throttle und Ail die sich gleichzeitig bewegen. Yaw bleibt unberührt.
Ich glaube es liegt am gps, der im Moment nicht instaliert ist weil ich es noch nicht bekommen habe. Ich habs mal aktiviert und deaktiviert um den unterschied fest zu stellen aber da bin ich noch nicht weiter gekommen.


hier noch meine Einstellungen:
# dump
Afro32 CLI version 2.3 Oct 22 2014 / 19:03:34Current Config: Copy everything below here...
aux 0 4
aux 1 0
aux 2 0
aux 3 0
aux 4 0
aux 5 0
aux 6 0
aux 7 0
aux 8 0
aux 9 0
aux 10 0
aux 11 0
aux 12 0
aux 13 0
aux 14 0
aux 15 0
aux 16 0
aux 17 0
aux 18 0
aux 19 0
aux 20 0
mixer QUADX
feature -PPM
feature -VBAT
feature -INFLIGHT_ACC_CAL
feature -SERIALRX
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -LED_RING
feature -GPS
feature -FAILSAFE
feature -SONAR
feature -TELEMETRY
feature -POWERMETER
feature -VARIO
feature -3D
feature VBAT
feature INFLIGHT_ACC_CAL
feature MOTOR_STOP
feature TELEMETRY
map AETR1234
set looptime = 3500
set emf_avoidance = 0
set midrc = 1500
set minthrottle = 1050
set maxthrottle = 1850
set mincommand = 1000
set mincheck = 1100
set maxcheck = 1900
set deadband3d_low = 1406
set deadband3d_high = 1514
set neutral3d = 1460
set deadband3d_throttle = 50
set motor_pwm_rate = 400
set servo_pwm_rate = 50
set pwm_filter = 0
set retarded_arm = 0
set disarm_kill_switch = 1
set flaps_speed = 0
set fixedwing_althold_dir = 1
set reboot_character = 82
set serial_baudrate = 115200
set softserial_baudrate = 9600
set softserial_1_inverted = 0
set softserial_2_inverted = 0
set gps_type = 0
set gps_baudrate = 0
set gps_ubx_sbas = 0
set serialrx_type = 0
set sbus_offset = 988
set telemetry_provider = 0
set telemetry_port = 0
set telemetry_switch = 0
set vbatscale = 110
set currentscale = 400
set currentoffset = 0
set multiwiicurrentoutput = 0
set vbatmaxcellvoltage = 43
set vbatmincellvoltage = 33
set power_adc_channel = 0
set align_gyro = 0
set align_acc = 0
set align_mag = 0
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 0
set yaw_control_direction = 1
set acc_hardware = 0
set mag_hardware = 0
set max_angle_inclination = 500
set moron_threshold = 32
set gyro_lpf = 42
set gyro_cmpf_factor = 600
set gyro_cmpfm_factor = 250
set pid_controller = 0
set deadband = 0
set yawdeadband = 0
set alt_hold_throttle_neutral = 40
set alt_hold_fast_change = 1
set throttle_correction_value = 0
set throttle_correction_angle = 800
set rc_rate = 90
set rc_expo = 65
set thr_mid = 50
set thr_expo = 0
set roll_pitch_rate = 0
set yaw_rate = 0
set tpa_rate = 0
set tpa_breakpoint = 1500
set failsafe_delay = 10
set failsafe_off_delay = 200
set failsafe_throttle = 1200
set failsafe_detect_threshold = 985
set rssi_aux_channel = 0
set rssi_adc_channel = 0
set rssi_adc_max = 4095
set rssi_adc_offset = 0
set yaw_direction = 1
set tri_unarmed_servo = 1
set gimbal_flags = 1
set acc_lpf_factor = 4
set accxy_deadband = 40
set accz_deadband = 40
set acc_unarmedcal = 1
set small_angle = 25
set acc_trim_pitch = 0
set acc_trim_roll = 0
set baro_tab_size = 21
set baro_noise_lpf = 0.600
set baro_cf_vel = 0.985
set baro_cf_alt = 0.965
set accz_lpf_cutoff = 5.000
set mag_declination = 0
set gps_pos_p = 11
set gps_pos_i = 0
set gps_pos_d = 0
set gps_posr_p = 20
set gps_posr_i = 8
set gps_posr_d = 45
set gps_nav_p = 14
set gps_nav_i = 20
set gps_nav_d = 80
set gps_wp_radius = 200
set nav_controls_heading = 1
set nav_speed_min = 100
set nav_speed_max = 300
set nav_slew_rate = 30
set p_pitch = 40
set i_pitch = 30
set d_pitch = 23
set p_roll = 40
set i_roll = 30
set d_roll = 23
set p_yaw = 85
set i_yaw = 45
set d_yaw = 0
set p_alt = 50
set i_alt = 0
set d_alt = 0
set p_level = 90
set i_level = 10
set d_level = 100
set p_vel = 120
set i_vel = 45
set d_vel = 1
# dump
Afro32 CLI version 2.3 Oct 22 2014 / 19:03:34Current Config: Copy everything below here...
aux 0 4
aux 1 0
aux 2 0
aux 3 0
aux 4 0
aux 5 0
aux 6 0
aux 7 0
aux 8 0
aux 9 0
aux 10 0
aux 11 0
aux 12 0
aux 13 0
aux 14 0
aux 15 0
aux 16 0
aux 17 0
aux 18 0
aux 19 0
aux 20 0
mixer QUADX
feature -PPM
feature -VBAT
feature -INFLIGHT_ACC_CAL
feature -SERIALRX
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -LED_RING
feature -GPS
feature -FAILSAFE
feature -SONAR
feature -TELEMETRY
feature -POWERMETER
feature -VARIO
feature -3D
feature VBAT
feature INFLIGHT_ACC_CAL
feature MOTOR_STOP
feature TELEMETRY
map AETR1234
set looptime = 3500
set emf_avoidance = 0
set midrc = 1500
set minthrottle = 1050
set maxthrottle = 1850
set mincommand = 1000
set mincheck = 1100
set maxcheck = 1900
set deadband3d_low = 1406
set deadband3d_high = 1514
set neutral3d = 1460
set deadband3d_throttle = 50
set motor_pwm_rate = 400
set servo_pwm_rate = 50
set pwm_filter = 0
set retarded_arm = 0
set disarm_kill_switch = 1
set flaps_speed = 0
set fixedwing_althold_dir = 1
set reboot_character = 82
set serial_baudrate = 115200
set softserial_baudrate = 9600
set softserial_1_inverted = 0
set softserial_2_inverted = 0
set gps_type = 0
set gps_baudrate = 0
set gps_ubx_sbas = 0
set serialrx_type = 0
set sbus_offset = 988
set telemetry_provider = 0
set telemetry_port = 0
set telemetry_switch = 0
set vbatscale = 110
set currentscale = 400
set currentoffset = 0
set multiwiicurrentoutput = 0
set vbatmaxcellvoltage = 43
set vbatmincellvoltage = 33
set power_adc_channel = 0
set align_gyro = 0
set align_acc = 0
set align_mag = 0
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 0
set yaw_control_direction = 1
set acc_hardware = 0
set mag_hardware = 0
set max_angle_inclination = 500
set moron_threshold = 32
set gyro_lpf = 42
set gyro_cmpf_factor = 600
set gyro_cmpfm_factor = 250
set pid_controller = 0
set deadband = 0
set yawdeadband = 0
set alt_hold_throttle_neutral = 40
set alt_hold_fast_change = 1
set throttle_correction_value = 0
set throttle_correction_angle = 800
set rc_rate = 90
set rc_expo = 65
set thr_mid = 50
set thr_expo = 0
set roll_pitch_rate = 0
set yaw_rate = 0
set tpa_rate = 0
set tpa_breakpoint = 1500
set failsafe_delay = 10
set failsafe_off_delay = 200
set failsafe_throttle = 1200
set failsafe_detect_threshold = 985
set rssi_aux_channel = 0
set rssi_adc_channel = 0
set rssi_adc_max = 4095
set rssi_adc_offset = 0
set yaw_direction = 1
set tri_unarmed_servo = 1
set gimbal_flags = 1
set acc_lpf_factor = 4
set accxy_deadband = 40
set accz_deadband = 40
set acc_unarmedcal = 1
set small_angle = 25
set acc_trim_pitch = 0
set acc_trim_roll = 0
set baro_tab_size = 21
set baro_noise_lpf = 0.600
set baro_cf_vel = 0.985
set baro_cf_alt = 0.965
set accz_lpf_cutoff = 5.000
set mag_declination = 0
set gps_pos_p = 11
set gps_pos_i = 0
set gps_pos_d = 0
set gps_posr_p = 20
set gps_posr_i = 8
set gps_posr_d = 45
set gps_nav_p = 14
set gps_nav_i = 20
set gps_nav_d = 80
set gps_wp_radius = 200
set nav_controls_heading = 1
set nav_speed_min = 100
set nav_speed_max = 300
set nav_slew_rate = 30
set p_pitch = 40
set i_pitch = 30
set d_pitch = 23
set p_roll = 40
set i_roll = 30
set d_roll = 23
set p_yaw = 85
set i_yaw = 45
set d_yaw = 0
set p_alt = 50
set i_alt = 0
set d_alt = 0
set p_level = 90
set i_level = 10
set d_level = 100
set p_vel = 120
set i_vel = 45
set d_vel = 1
- Status
- Nicht offen für weitere Antworten.

