
Hex Hex - Tarot FY690S
Hier wird später ein Bild vom fertigen Kopter sein
Einleitung :
Hey zusammen! Dieses Jahr hat der Weihnachtsman alles zum Bau ein Tarot FY690S untern Weihnachtsbaum gelegt.
") Und da ich gerne andere Erfahrungen / Bauberichte lese will ich auch hier meine Erfahrungen teilen Grundsätzlich gilt hier natürlich, Fragen, Kritik (gerne auch Lob ) : Immer raus damit Ich freu mich über jede Beteiligung..
Und da ich gerne andere Erfahrungen / Bauberichte lese will ich auch hier meine Erfahrungen teilen Grundsätzlich gilt hier natürlich, Fragen, Kritik (gerne auch Lob ) : Immer raus damit Ich freu mich über jede Beteiligung..Komponenten :
Frame : Tarot FY690S
Steuerung : MultiWii MegaPirateNG auf HK AIO Flight Controller + Neo 6M GPS + Bluetooth
Motoren : Turnigy Multistar 4220-880kv
Regler : HK F-20A mit SimonK
Props : 10x5 Carbon eProp RCTimer 11x5.5
Akku : 3S 3000mAh - 8000mAh (mal schauen, was ich da hab oder was noch her muss ;D ) 3S2P 3000mAh (also 6000mAh)
RC : Graupner SJ MZ-24 + GR-16
Baubericht :
So, dann jetzt aber los mit dem eigentlichen Baubericht :
25.12.13
Erstmal alles ausgepackt

Nachdem alles umfangreich angeschaut wurde ging es an die programmierung der Regler auf SimonK.
Als Programmieradapter habe ich den USBasp von HK genommen.. Die Beschreibung ist leider etwas dürftig, so hat es ein wenig genauert herauszufinden wie man den Treiber unter Windows 8 (ja, leider) installiert... Hierzu nur ein link : http://letsmakerobots.com/node/36841. Auch den Pinbelegung ist nicht beschriftet.. Schlussentlich bin ich von der Standart-ISP-Belegung ausgegangen und es hat geklappt ;D
Als Programmierkabel habe ich mir aus einem 6 poligen Flachbandkabel gebaut. Ich denke hier sprichen Bilder mehr als viele Worte.



Nicht sehr schön auch auch nicht sehr haltbar, hat aber auf Anhieb funktioniert
Programmiert habe ich dann mit dem KK Flashtool von Lazyzero nach dieser Anleitung. Eigentlich wollte ich noch Bilder von Programmieren machen, aber es war schwer genug den Regler festzuhalten, die Programmieradapter ohne Kurzschluss draufzudrücken und irgendwie den Flashvorgang mitm kleinen Finger zu starten.....
Zum testen habe ich einfach einen Motor und ein Empfänger angeklemmt und zur Stromversorgung (habe leider kein strombegrenztes Netzteil) einen 9V Block.. Das beruht auf keiner wissenschaftlichen Meinung, aber ich habe mir gedacht, dass so ein 9V Block wahrscheinlich nicht genug Strom liefern würde um im Falle einer Fehlprogrammierung einen größeren Schaden anzurichten.. Ob das stimmt oder nicht habe ich zum Glück nicht rausgefunden ;D
Grundsätzlich noch zu selber Programmieren : Ich hab im Vorfeld ein wenig gehadert ob es nun die F-20A zum selber Flashen oder die Afro ESCs (fertig geflasht) sein sollen.. Schlussendlich sind es dann ja die F-20A geworden, weil a) fast 50% günstiger (ca. 7$ zu 12$) und b) Spaß an Elektronik Kram und der Wille es selbst zu machen
Wer also mit nem Lötkolben umgehn kann und keine dicken Wurstfinger hat schafft es schon die Regler zu flashen - Nur Mut! Wer es aber unkomplizierter und sicherer will sollte zu den Fertigen greifen.. Schlussentlich bleibt es also ein Lust- und Kostenfrage.
Hier dann die fertigen Regler.

Auch die FC wurde mit der neusten MultiWii Version bespielt und grob getest - alle Sensoren geben schonmal ganz plausible Werte aus und I2C Fehler gibt es auch keine ;D Weiter wird hier dann aber erst im Modell getestet
Nachdem nun der Elektronik Kram soweit geklärt ist geht es nun an das eigentliche Modell..
Zum "Baukasten" : Alle teile gut verpackt, auch wenn manchmal die Zusammenstellung in einer Tüte keinen inhaltlichen Sinn ergibt, die Centerplate schon vormontiert (was im Endeffekt imho nicht viel bringt, da man die eh nochmal auseinander nehmen muss..), und dann die Anleitung - naja, Anleitung ist vielleicht ein bisschen hochgegriffen.. Ein chinesischer Zett mit ein paar grottigen Explosionszeichnungen.. Also naja, man kann zwischendurch mal reingucken auf gut Glück, aber zu viel sollte man nicht erwarten ;D (Wie sich später auch herausstellte habe ich an einer Stelle duch die schwammige Anleitung Mist zusammengebaut und schon auf den Hersteller geschimpft er hätte Teile vergessen - Dazu an gegebener Stelle mehr ;D ) Die Qualität der Bauteile ist aber (zumindest optisch) 1A!
Zuerst habe ich die Centerplate auseinandergeschraubt.. Zum Einen um besseren Zugang zu haben um die fehlenden Teile zwischen der Centerplate einzubauen (Nein, es sind nämlich nur die Klemmen montiert.. Die Alu-Schellen nicht) und zum Anderen um alle Schrauben mit Schraubensicherung(!!) neu zu verschrauben.. Ich traue diesen vorgefertigten, chinesischen Verschraubungen nicht immer..


Nun kam der Zeitpunkt wo ich schon geflucht habe.. Die Montage der Arme.
Die vier klappbaren Arme waren kein Problem, Schraube rein, in die Klemme geklipst - fertig.. Dazu allerdings : Ich dachte vorher das wären so Plastikklemmen die halt den Arm irgendwie schon halten.. Pustekuchen - Ein mal eingeklippst sitzten die Dinger so fest, dass man die kaum noch rausbekommt.. Da das ganze ja momentan nur von einer Centerplate gehalten wurde habe ich den Versuch sie wieder auszukipsen abgebrochen, weil ich Angst hatte irgendwas anderes dabei abzubrechen.. Ich werde also den Klappmechanismus eher nicht benutzt, wenn nicht unbedingt nötig - die Teile sind fester als nur fest
Um dann die zwei festen Arme zu montieren gibt es ja die Alu-Schellen..
Dabei waren 6 "Halb"-Schellen und 4 Muttern (So Bügen, also 2 Gewinde pro Büglel - keine Ahnung, wie man so ein Teil nennt)...
So, mein Verstand sagt nun :
2 Arme * je 2 Befestigung * je 2 "Halb"-Schellen = 8.. (+ 4 Gegenmuttern)..... Grrrrrrr, da fehlen zwei -.-
Zusätzlich wird das Landegestell auch mit diesen Schellen befestigt.. An dem vormontierten Landegestell ist je schon eine "Halb"-Schelle angebracht... Es braucht also zur Montage noch zwei "Halb"-Schellen und zwei Muttern...
Macht also fehlend : 4 "Halb"-Schellen und 2 Muttern.. Also genau zwei Sets....
Das dachte ich den ganzen Tag bis ich mir gerade für den Baubericht nochmal Produktbilder angesehn habe... Das Landegestell wird direkt als eine Befestigung benutzt.. Dadurch kommt man genau auf die beiliegende Anzahl ^^ Als ich das gesehn hab, hab ich mir nur an Kopf gefasst
Aber zu meiner Verteidigung - in der Anleitung was dies absolut nicht ersichtlich, da es so aus, als wären das getrennte Teile.......Naja, da mir der Fehler gerade erst aufgefallen ist werde ich das morgen korrigieren
Die folgenden Bilder sind also mit dem Fehlaufbau.. Peinlich, Peinlich.... 

Update 1 (Vervollständigung des Berichts über die gestrigen Arbeiten))
Als nächstes habe ich mir dann den Antriebsstrang vorgenommen.. Puh, das alles mal 6 ist schon aufwendig
Da selbst die 42mm Durchmesser des Motors schon grenzwertig für die Montage waren, war das ein ganz schönes gefummel. Das Problem war, dass die Bohrung in der Motorplatte für die Kabeldurchführung schon halb vom Motor verdeckt waren. Mit ordentlich um die Ecke biegen hat es aber dann gepasst! Damit die Kabel nicht durchscheuern habe ich die Durchführung vorher noch (soweit das möglich war) rund geschliffen.. Ich denke mal das müsste reichen.

Anschließend habe ich dann die Kabel auf Motorseite verlängert. Obwohl der Regler 16AWG Kabel hat habe ich zum Verlängern nur 18AWG (ca.0,8-1,0mm² - weiß nicht genau was das Kabel hat - sieht aber rein subjektiv eher nach 1mm² aus..) genommen.. Nach der Bestellung habe ich mir auch überlegt, dass 16er besser gewesen wäre, aber da waren die 5m 18er schon bestellt.. Ich denke mal vom Strom (Ich rechne mit 16-17A max. pro Motor) her dürfte das kein Problem sein - einzig der Leistungsverlust ist vll. etwas höher..
Was sagen die Experten dazu? 18er okay, oder auf jeden Fall noch tauschen?
Die originalen 3,5mm Stecker habe ich abgelötet und direkt Kabel dran.. 1. Kommt man im Rohr eh nicht mehr ohne weiteres dran und zweitens ist SimonK Revers aufspielen einfacher als umlöten ;D

Nachdem dann alles fertig gelötet war, kam die Montage.. Hier sieht man auch nochmal wie eng es mit den Motorkabeln auf der Befestigungsplatte ist..



Update 2
26.12.13
Nachdem mir ja gestern Abend mein Fehler aufgefallen war habe ich mich erstmal dran gesetzt das Landegestell richtig zu montieren. Von der Qualität der T-Stücke war ich sehr enttäuscht... Zuerst mal fehlte eines der drei Löcher für die Madenschrauben.. Das musste kurzerhand noch selbst gebohrt werden.. Zusätzlich sind die Madenschrauben an sich ein Problem... Madenschrauben in ein sprödes Carbonrohr.. Hmm, das überzeugt mich nicht, aber erstmal habe ich es jetzt so gebaut.. Die T-Stücke vom FY680 gefallen mir da viel besser..



Dazu muss ich noch sagen, dass ich die Kontruktion des Landegestells ungünstig finde.. Man muss eine ganz bestimmte Reihenfolge beim Zusammenbau beachten und ist im Reperaturfall ziemlich aufgeschmissen, weil man fast alles wieder auseinandernehmen muss... Aber gut, wollen wir hoffen, dass nichts ausgetauscht werden muss..

Nun habe ich die zweite Centerplate aufgesetzt und beim verschrauben dann gleich die Ausleger mittels Wasserwaage ausgerichtet. Das habe ich dann bei allen anderen Auslegern wiederholt..

Probehalber habe ich dann mal das Landegestell drangehalten.. Passt.

Als nächstes Habe ich dann die Kabel der Regler gekürzt und dabei die Ferrit Ringe rausgemacht, weil ich der Meinung war, dass die bei der Kabellänge unnötig sind und außerdem hätte ich die Kabel dann nicht durch die Durchführung bekommen ;D


Als nächstes habe ich dann die Regler verkabelt. Wie geplant habe ich sie einfach unter die Centerplate verlegt.. Das ganze verkabeln hat echt am längsten gedauert..



Eigentlich kommt diese schmalere Platte ja oben auf die Centerplate.. Ich habe sie unten drunter gehängt und da kommt dann Akku mit Klettbändern dran.. Das ist praktikabel und unauffällig..


Damit ist dann rein mechanisch alles aufgebaut und es geht an die FC..
Da gibt es auch nicht viel zu sagen.. FC druf, Regler und RX dran - vorerst fertig. GPS und Bluetooth wird später eingebaut.

Dann ging es an die Programmierung..

Multiwii wurde angepasst und hochgeladen.. Zuerst ging die RC Anzeige nicht, das lag aber daran, dass ich den falschen Summensignal Ausgang gewählt habe.. Obwohl man im Regler "SUMO 06" bis SUMO 14" eingestellen kann hat SUMO 06 auf Kanal 6 nicht funktioniert.. Die Standardeinstellung SUMO 08 auf Kanal 8 hat dann sofort funktioniert.. Anschließend am Sender noch die Servowege und Richtungen angepasst.. Dann habe ich erstmal die MultiWii Version zum Regler einlernen laufen lassen.. Nach dem Upload der richtigen Firmware kam dann der spannende Moment : Motoren armen..
Und *grins* alles läuft
Keine Synchronisationsfehler oder Sonstiges festzustellen (Hatte da wegen 16Pol Motoren Befürchtungen) Drei Motoren liefen falsch herum.. Die habe ich dann einfach über einen Arduino USB Linker Auf revers umgeflashed.. Super einfach!
Update 3
Was jetzt an Hardware noch fehlt ist Bluetooth und GPS..
Das Bluetooth Modul ist ja schon vorkonfiguriert.. Einzig der Stecker passt nicht zum AIO Board.. Also, einfach das Kabel vom AIO Board mit dem Stecker am BT Modul zusammengebastelt.. Am einfachsten ging das, indem man die Laschen an den Steckern mit einem Skalpell etwas hochdrückt. Das kann man Stifte einfach rausziehen.


So, dann kam das GPS Modul ran.. Den Stecker mussten auch wieder umgebastelt werden.. Hier ist zu beachten, dass bei Versorung durch einen Regler am Stecker der Serial Ports keine 5V anliegen.. Also habe ich dur Tx und Rx an diesen Port geklemmt und 5V und Gnd vom I2C Port geholt..
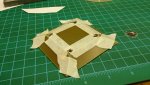
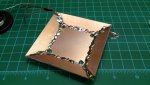
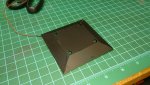
Zusätzlich habe ich mir nach der Autoquad Anleitung eine Groundplane gebaut.. Einfach die Schablone auf ne normale Plaine übertragen, aussägen und zusammenlöten.. Am bestern einfach auf der Rückseite mit Klebestreifen in Form halten.. Von der Qualiät her ist es mäßig geworden, weil meine Schablone irgendwie zu groß war (hab ich erst später bemerkt...) Daher musste ich bei den Bohrungen ein wenig nacharbeiten.. Nicht schön aber okay.. Da ja Gnd angelegt werden muss habe ich einfach ein Kabel angelötet, was auf die FC an Gnd gesteckt wird.. Um das ganze zu schätzen habe ich es mit normaler Sprühfarbe lackiert.. Das GPS Modul dannach einfach mit VHB Tape drauf und fertig..
Leider hatte ich nicht mehr genug abstandshalter, so hällt die Platte erstmal nur auf der Diagonalen, aber das hatt ja auch nicht viel zu halten


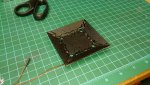
Eingebaut sieht es dann so aus

Als nächstes habe ich mich dann ans Propeller wuchten gemacht. Hier gibt es ja immer zwei Möglichkeiten.. leichtere Hälfte schwerer oder schwerere Hälfte leichter.. Ich habe mich für letzteres entschieden.. Einfacher gesagt als getan.. Der erste Prop hat bestimmt eine halbe Stunde gebraucht.. Erstaunlich wie hart diese Carbon Props sind und wie schlecht sie sich bearbeiten lassen.. Angefangen habe ich mit 600er Nassschleifpapier.. Naja, am Ende hatte ich dann 180er genommen, weil einfach alles schleifen keine Wirkung hatte.. Schlussendlich habe ich aber sehr gut gewuchtete Props mit top Oberfläche
Aber mal zum Aspekt Dreck : Es entsteht nicht viel Dreck und durch Nassschleifen muss man sich auch keine Sorgen ums einatmen machen, aber nächstet mal werde ich Handschuhe anziehen.. Man sieht den Dreck an den Händen auch nach zwei Tage und zig fachem Waschen immernoch.. Der Dreck geht echt "unter die Haut" ^^

Dann Props montiert und am nächsten Morgen bereit zum Testflug

Nach den ersten Test in der Hand was es dann so weit : Ersten mal abheben
Soweit alles top - bisschen schwammiges Verhalten, aber sonst alles in Ordnung!
Um das ganze dann etwas knackiger zu kriegen habe ich mich dann an die PIDs gewagt..
Naja, kurzum : es wurde immer besser, die Werte gingen hoch und der Verhalten wurde besser, bis dann irgendwann ein Problem auftrag.. Bis jetzt noch ungelöst.. Näheres zum Problem könnt ihr HIER nachlesen - ich will nicht alles nochmal für diesen Bericht in schön vormulieren ^^
Naja, wie in dem Beitrag erwähnt ist mir dann eines der dünnen Carbonrohre vom Ladegestell angeknackt..
Da ich aber diese Rail unter der Centerplate nicht montiert habe, hatte ich zum Glück noch zwei übrig.. Vielleicht kann man das alte aber auch noch reparieren..Naja, morgen gehts weiter.. Ich werde die PIDs wieder auf Standard zurücksetzten und irgendwie (ich weiß es noch nicht - vielleicht hat einer ja ne Idee?! ) mit festgehaltenen Kopter dieses Phänomen überprüfen.. Eventuell werde ich auhc die originale PID Implementierung testen.. Im Moment nutze ich die AlexK Version...
Mal schauen.. Besonders im Bezug auf diesen letzten Punkt wäre ich um Hilfe dankbar
Update 4
Heute habe ich mich daran gewagt den Fehler zu finden. Zuerst habe ich die PIDs komplett zurückgesetzt auf die Standardwerte.. Der Copter flog, wie zu erwarten, wieder deutlich schwammiger. Den Fehler konnte ich nicht direkt reproduzieren, aber bereits nach leichtem ehöhen der PIDs trat der Fehler wieder auf. Um zu testen ob es an AlexK liegt habe ich MultiWii 2.3 nochmal neu geflashed mit dem Oldschool Algorithmus..
Hier war ich aber schon mit den Standardsetting nicht so überzeugt wie mit AlexK.. Das Flugverhalten war ähnlich schwammig, aber der Kopter oszillierte ganz leicht.. Ein zeichen dafür, dass bei den PIDs nicht mehr viel geht.. Aber bereits mit den Standardsetting konnte ich den Fehler reproduzieren..
Um der Sache dann spezieller auf den Grund zu gehen habe ich 5 Motoren abgeklemmt so, dass ich das Phänomen besser im Stand testen kann.. Aber egal wie sehr ich an den Sticks hin und her schwung trat der Fehler im Stand nicht auf.. Dann habe ich einfach mal Halbgas eingestellt und den Kopter extrem geschüttelt.. Dabei hörte man das Geräusch wieder und mir viel auf, wie der Druck auf einmal viel geringer wurde.
Meine Vermutung : Sync Fehler durch SimonK (Soll ja über 12Pole (meine Moren haben 16) vorkommen können - Das diese Probleme aber erst unter "Extremsituationen" auftreten können war mir neu.. aber seis drum)
Also habe ich eine ältere SimonK Version geflashed. Vorher war BS-NFET V2013-09-20 drauf und neu habe ich dann BS-NFET V2013-05-15 geflashed.. (Got sei dank habe ich das im Vorfeld mit dem Arduino USB Linker gelesen, sonst wäre dies eine sehr, sher, sehr umfangreiche Aufgabe geworden ^^ )
Dann habe ich den Regler neu eingelent, Prop wieder montiert und getestet. Und siehe da! Egal wie kräftig ich schüttelte, der Motor war immer voll da und kein Fehler war zu hören! TOP!
Also, dann mal "fix" (Guter Witz.....) die anderen fünf Regler umgeflashed, Drehrichtungen angepasst, neu eingelent usw. Dann ging es direkt mit den ganz am Anfang erflogenen "guten" PIDS von 15 0.045 30 los.. Perfekt, Kopter wie angenagelt und keine Fehler mehr!
An dieser Stelle möchte ich auf einen anderen Fred hinweisen, den ich gestartet habe :
SimonK Kompatibilitätsliste (Motor / ESC Combos)
Hier habe ich eine Liste erstellt, wo jeder Motor / ESC Combos eintragen kann und dann eine getestete, funktionierende SimonK Version eintragen kann. Oder ebend auch Versionen die nicht funktionieren! Ich denke, wenn diese List größer und größer wird könnte sie sehr hilfreich sein, und das Eintragen so einer Zeile ist ja wirklich kein Aufwand!
Nachdem mir der Acro Mode schon sehr gut gefällt habe ich mich dann an die Einstellung für den Angle Mode gewagt.. Hier ist das verhalten noch nicht soo schön.. Der Kopter rastet extrem hart ein und überschwingt daher auch ein wenig, also kaum sind meine Sticks in der Mitte nagelt sich das Ding in die Horizontale.. Für den ein oder andereren sicherlich gewollt, aber ich hätte es dann doch gerne etwas weicher ;D Hier bin ich aber beim Einstellen noch zu keinem vernünftigen Ergebniss gekommen.. Im Vergleich dazu werde ich morgen dann auch erstmal den Horizon Mode probieren..
Update 5 16.1.14
Sodele, inzwischen ist ja ein bisschen Zeit vergangen und ich wollte mal noch ein paar Praxiserfahrungen hinzufügen.
Oben habe ich ja geschrieben, ich wollte den Horizon Mode nochmal probieren.. Hmm ja, probieren ja - nutzvoll nein.. Mit er neuen PID Implementierung scheint der Horizon Mode nicht richtig zu funktionieren.. Es ist scheinbar einfach der Acro Mode.. Nach Fornberichten zu Folge ist das wohl nicht mein Fehler, sondern scheinbar ein Bug.. Aber egal, ich bevorzuge zum normalen Fliegen eh den Acro Mode.
Nachdem dann dabei soweit alles lief wollte ich das GPS einstellen. Ganz nicht so einfach, wie sich herausstellte..
Mit den Original PIDs war das ganze naja.. Also +-10m, aber das muss wohl genauer gehen, auch wenn MultiWii dafür bekannt ist kein GPS Ass zu sein.......
Nach ein bisschen PID tuning habe ich jetzt hinbekommen, dass er meistens so +-3m hällt, ganz okay eigentlich.. Manchmal drifter er aber ohne ersichtliche Grund auch mal 10 oder mehr Meter ab, fängt sich dannach aber wieder.. Dafür hällt er manchmal auch auf +-1m.. Was viel mehr nervt, ist dass er bei Wind ja erstmal in den Level Mode schaltet und sich grade legt, dann gibt es durch den Wind natürlich sofort einen Drift.. Das GPS scheint aber einen Moment zu brauchen, denn erst ~10m weiter fängt er an erkennbar gegenzuregeln und fliegt zurück.. Dann überschießt er auch nicht oder sowas, dann hällt er halt mit den +-5m.. Kann man das irgendwie verhinden, dass beim Einschalten immer dieser Drift entsteht?? Das nervt ^^
Dann wollte ich auch mal ein bisschen Rundflüge und sowas machen, was mir aber kein gutes Gefühl gegeben hat war die Lageerkennung..Bereits bei geschätzen 15m Entfernung sieht man bei den schwarzen Rahmen nichts mehr.. Die beiden roten Motorträger sind gut gemeint, bringen aber praktisch fast nichts..
Um diesem Problem aus dem Weg zu gehen habe mal einen noch vorhandenen roten LED Strip um einen Ausleger gewickelt

Trotz meiner Befürchtungen sieht man das auch tagsüber ganz gut.. Knallt natürlich die Sonne drauf bringt es nicht, aber zumindest jetzt Fliegt man ja auch meistens eher nicht im strahlenden Sonnenschein
Schlussendlich habe ich mir bei Aliexpress 5m 5050 RGB Strips bestellt, so dass ich jeden Arm gut ausleuchten kann.. Ob ich vorne eine Farbe und den Rest eine Andere, oder vorne Eine, Rechts/Links dann klassische Positionsbeleuchtung Rot/Grün und hinten noch eine Andere, weiß ich nicht genau..
Was meint ihr sieht man besser??? Bei vier verschiedenen Farben befürchte ich, dass man den Wald vor lauter Bäumen nicht mehr sieht - klartext also : zu viele Farben auf zu wenig Raum -> keine verbesserte Erkennung..
Die ganze Zeit über wollte ich mal die Leistung der Motoren überprüfen, dabei mein professioneller Messstand :

Copter kopfüber an eine Zugwaage gehängt und dann einen Motor mitm Servotester bedient.
Dabei ist folgendes herausgekommen (Diese Messmethode ist schrecklich ungenau, daher nicht soooo viel auf die Werte geben. .Es sind Richtwerte ;D )
Strom Leistung Schub Effizienz
Motor @ Schweben
2,8A 31W 300g 9,67g/W
Motor @ Maximum
11A 122W 900g 7,38g/W
Isgesammt zufriedenstellende Werte..5,4kg Schub bei 1,8kg Abfluggewicht - da ist noch etwas Reserve
Verwunderlich ist dann aber andererseits, dass ich mit ca. 60% Knüppelstellung schwebe... Das scheint wohl alles nicht so ganz linear zu sein wie erwartet... Werde da noch ein bisschen an der K1 Kurve basteln...
Zwischenzeitlich habe ich im CAD auch schon ein 3-Achs Brushlessgimbal entworfen, genau passend für den Tarot Rahmen und meine Bedürfnisse (dazu kam, dass es für die Sony HDR AS 15 eh kein Fertiges gibt)
Bis dass dann gebaut wird dauerts wohl noch ein bisschen.. Erstmal noch ein bisschen Fliegen üben und den ganzen Kremel aus China bestellen.. Ich denke vor mitte März (Vorlesungsfreie Zeit) wird das nichts.. Das Gimbal wird dann aber selbstverständlich hier oder in einem seperaten Bericht vorgestellt
Geplant dafür ist auch noch aus Baugründen die Landebeine zu verlängern und elektrisch klappbar zu machen - dazu dann aber zu gegebner Zeit mehr
Update 6
Die letzten drei Tage hat es einen sehr, sehr großen Schritt in eine erfreuliche Richtung gemacht! Nachdem ich vom MultiWii Flugverhalten überzeugt war, überzeugten mich Modi wie Höhe halten oder GPS überhaupt nicht.. Gezappel, totale Ungenauigkeit..
Dann habe ich mich entschieden auf MegaPirateNG umzusteiegen.
Diese Vorteile habe ich mir erhofft : Besseres GPS Verhalten, besseres Barometerverhalten, bessere Telemtriemöglichkeiten(auch wenn im Moment noch nicht in Benutzung).
Bekannte Nachteile : Bluetooth Modul nicht mehr nutzbar, kein sportliches Fliegen mehr möglich..
Und genau so kam es dann auch. Das fehlende Bluetooth Modul lässt sich allerdings dadurch kompensieren, dass man einen Wert auf ein Poti am Sender legen kann.. Immerhin etwas..
Also fing es wieder von Vorne an - Hierbei muss ich sagen, dass mich die Standardparamter von MultiWii mehr überzeugt hatten, auch wenn diese schon verbesserungswürdig waren..
Allerdings ließ es sich schnell mit Rate Roll / Pitch P und D verbessern! Eigentlich wollte ich noch weiter einstellen, aber da es heute zum Flugplatz ging, habe ich einfach mal zum Spaß GPS eingestellt.. Dabei hatte ich nicht zu hohe Erwartungen, da ich weder Atti Modus getestet hatte, noch eine tolle Kompasskalibrierung gemacht habe ( Indoor zwischen PC und TV mit eingeschränker Bewegungsfreiheit durch Kabelverbindung)..
Was ich dann aber erleben durfte ließ mich nicht schlecht staunen.. GPS Modus aktiviert und da bewegt sich nicht - rein garnichts. Meiner Meinung nach mindestens(!) geausogut wie bei der Naza.. Auch das Barometer einwandfrei.. Position/Höhe halten +-10cm! Einfach genial, wenn man bedenkt, das bei MultiWii +- 5 bis 10m drin war!
Auch der "Am Landegestell festhalten und wegziehen"-Test perfekt! Paar Meter weg und exakt auf die vorherige Position.. Auch aus mittlere Geschwindigkeit GPS reingehauen, Kopter brems sofor, überschwingt Null und ist festgenagelt!
Auch wenn ich mich wiederhole : Ich bin begeistert!
Wenn jetzt noch RTL funktioniert, steht dem Kameraträger nichts mehr im Wege!!
Ingesgesammt kommt MegaPirateNG / APM meinen Anforderungen einfach viel näher! Agiles Fliegen, insbesondere der Acro Mode gefällt mir nciht so gut, wie bei MultiWii, aber GPS und Sicherheit war mir hier dann doch wichtiger!
Update 7
So, lang ists her, aber es gibt wieder mal was Neues
Da der Kopter soweit flog, wurde er jetzt langsam auf seinen Gimbaleinsatz vorbereitet.
Da die 10x5 Props die Motoren gerademal mit 11A belastet haben, musste da erstmal mehr her um effizienter zu arbeiten und das Payload des Gimbals zu tragen! Beim Rumprobieren mit eCalc habe ich dann folgende Diagramme erstellt
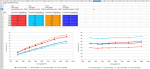
Also habe ich mir bei RCTimer die 11x5 bestellt - zusätzlich haben die den Vorteil direkt auf der Glocke montiert zu werden..
Also ich die dann erhalten habe war ich erstaunt! Die sind um ein vielfaches leichter als die HK 10x5 - die RCTimer Props sind viel dünnwandiger und haben auch ein ganz anderes Profil! Also erstmal wieder in mühsamer Kleinarbeit auswuchten.. Bei den HK Props habe ich die komplette Oberfläche weggeschliffen - bei den dünnen RCTimer Props habe ich das nicht gemacht, das wäre zu filigran - also habe ich einfach die Spitzen weggeschliffen! Ich hatte immer Befürchtungen das dadurch die Aerodynamik und Spurlauf negativ beeinflusst wird, aber ich hab auch schon in der Cergangenheit mit anderen Props gute Erfahrungen mit dieser Technik gemacht.. Bei einem HK Nanoracer waren die Props so schlecht, da habe ich bei einem 5Zoll Prop eine Seite locker 1,5cm gekürzt! Funktioniert aber astrein und schnurrt wie ein Kätzchen - ich will nicht wissen wie es das Modell und unausgewuchtetem Prop zerlegt hätte ;D Aber zurück zum Copter

Da mit dem Zusatzgewicht die Akkulaufzeit mit 3S 3000mAh einfach zu kurz geworden wäre habe ich auf 2P umgestellt und auch die Position der Akkus verlegt! Die sitzten jetzt auf der Centerplate rechts und links.

Und hier mein profi-payload
("Simuliert" das Gimbal )
Um den zweiten Akku anzuschließen habe ich direkt ein weiteres paar Kabel in meinen (sehr ordentlichen
) Kabelbaum eingelötet 

So, dann habe ich wieder die Motor-Prop Kombi gemessen (wie weiter oben beschrieben)..
Folgende Werte sind dabei entstanden (wie oben auch nur ein Anhaltspunkt..)
300g bei 2,8A -> 9,65g/W
400g bei 4,0A -> 9,01g/W
1120g bei 19,0A -> 5,31g/W
Leider keine Effizienz Steigerung im unteren Schubbereich
Aber dafür die Grenze etwas weiter nach oben verlegt.. Ich werde den Weg aber auf max. 90% begrenzen - 19A (~210W) sind für die Motoren schon etwas Überlast und die 20A Regler werden auch knapp..
Beim ersten Testflug hat sich dann das gezeigt was ich erwartet hatte : PIDs fürn Arsch - muss nochmal komplett neu eingestellt werden.. War aber bei 500g Payload + zweiter Akku + andere Props + anderer Schwerpunkt zu erwarten.. Die Copter hat mit den alten PIDs etwas gewobbelt - muss sie also runterdrehn.. Aber im Moment ist es sehr windig hier - und da ist mir das zu heikel ^^
So, das wars auch erstmal wieder - sobald irgendwann mal das Gimbal drunter ist (Wenn die mitte Januar georderten Gimbal-Motoren irgendwann mal ankommen -.- ) werde ich früher oder später wiedermal ein Update machen
Zuletzt bearbeitet:

