
Afro MINI 32
- Themenstarter fdietsch
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
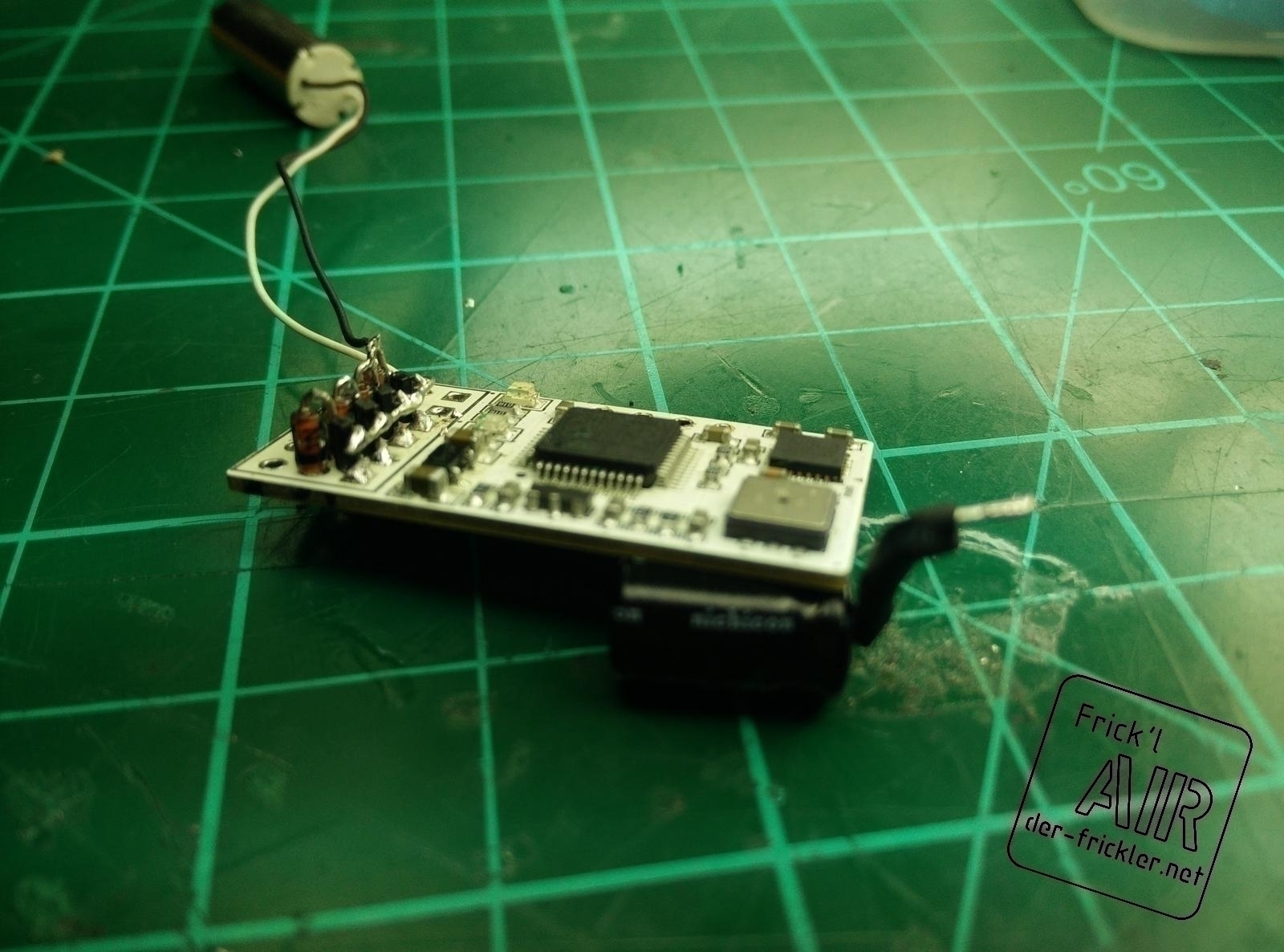
IMHO ist der nicht rausgeführt - hast du eine normale Naze32? Dann kannst Du den RC5 bis zum entsprechenden Bein des STM32 durchpiepen und das ganze rückwärts auf dem MINI durchchecken. Wenn ich das alte Schema richtig lese, ist es PIN16 der MCU. Dort dann fliegend Kupferdraht anlöten...


@Frickler: Sehr schöner Aufbau, schon im anderen Thread gesehen ") Das Feature ist drin (der cleanflight-Fork war nachdem das schon in baseflight ging, einfach set motor_pwm_rate = 8000 z.B. und es schaltet auf brushed..), habe es aber nicht selbst getestet, bin gerade in etwa auf demselben Bastelstand. Was ist das für ein Empfänger, Einzelkanal? Es gibt halt noch anscheinend diesen Bug.
Das Feature ist drin (der cleanflight-Fork war nachdem das schon in baseflight ging, einfach set motor_pwm_rate = 8000 z.B. und es schaltet auf brushed..), habe es aber nicht selbst getestet, bin gerade in etwa auf demselben Bastelstand. Was ist das für ein Empfänger, Einzelkanal? Es gibt halt noch anscheinend diesen Bug.
Das Feature ist drin (der cleanflight-Fork war nachdem das schon in baseflight ging, einfach set motor_pwm_rate = 8000 z.B. und es schaltet auf brushed..), habe es aber nicht selbst getestet, bin gerade in etwa auf demselben Bastelstand. Was ist das für ein Empfänger, Einzelkanal? Es gibt halt noch anscheinend diesen Bug.Fein, was kann die cleanflight sonst noch tolles mehr als die Baseflight, finde bei der hat sich auch einiges getan, die neuste aus der Chrome App fliegt jetzt prima finde ich.
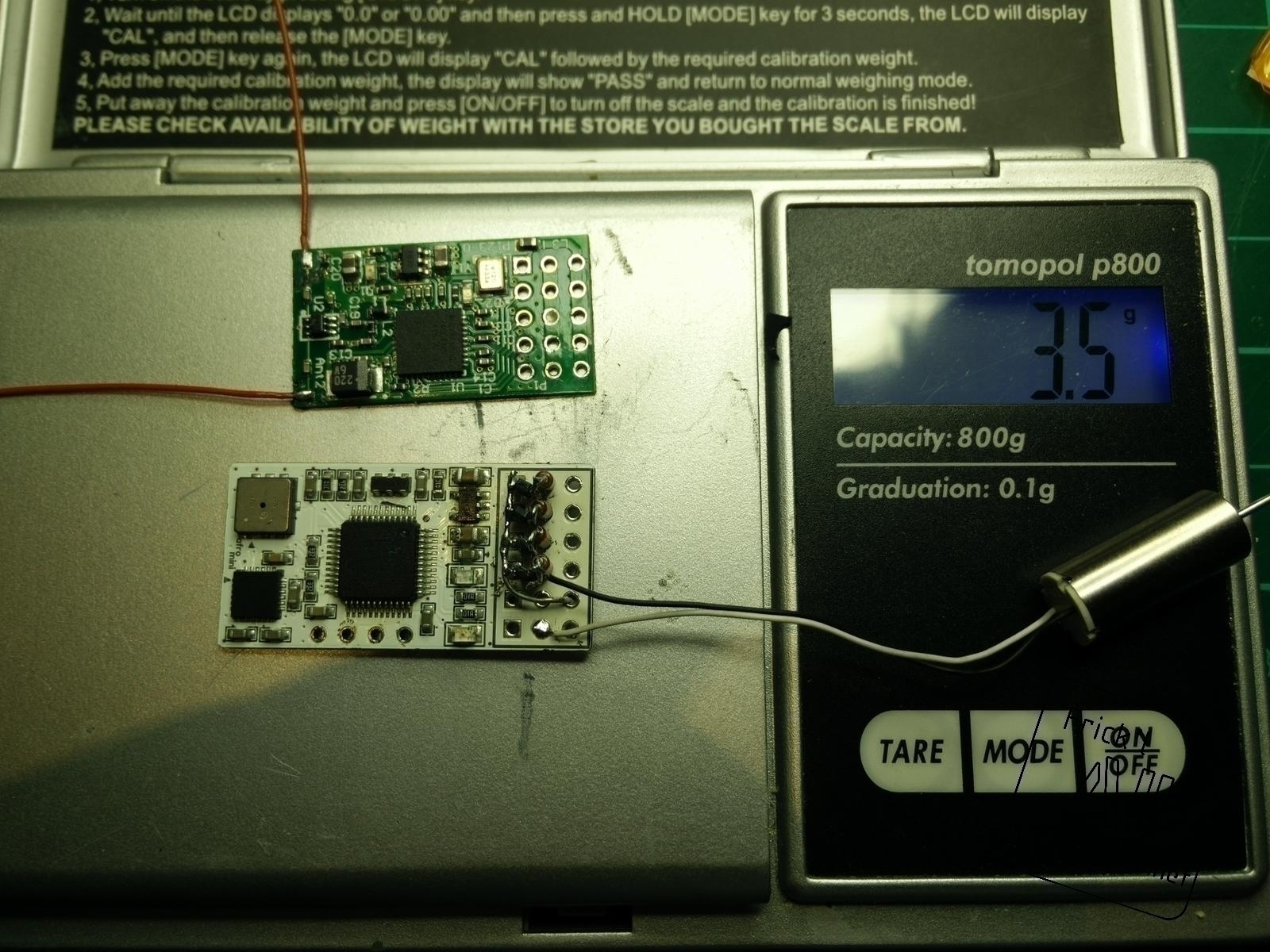
Hier noch ein paar infos zum kleinen:
Motorabstand: 7cm
Motorabstand diagonal: ca 11cm
Gewicht: ca 40g
Frame: 0.5mm GFK mit M1.4 Schrauben
Steuerung: Afromini 32 im Brushed Mode
Motoren: 4x 7mm Brushed vom UDI 816 mit passenden Props
Regler: 4x IRLML2502 FETs + Sperrdioden
Empfänger: Orange R410X mit CPPM
Akku:
FPV: Mini 600TVL Cam + 5.8GHz Modul
http://der-frickler.net/modellbau/planes/gofly_indoor
Hier noch ein paar infos zum kleinen:
Motorabstand: 7cm
Motorabstand diagonal: ca 11cm
Gewicht: ca 40g
Frame: 0.5mm GFK mit M1.4 Schrauben
Steuerung: Afromini 32 im Brushed Mode
Motoren: 4x 7mm Brushed vom UDI 816 mit passenden Props
Regler: 4x IRLML2502 FETs + Sperrdioden
Empfänger: Orange R410X mit CPPM
Akku:
FPV: Mini 600TVL Cam + 5.8GHz Modul
http://der-frickler.net/modellbau/planes/gofly_indoor
Direkt an den Pin löten ... das wird bei mir nicht lange halten, dafür habe ich zu viel Bodenkontakt (indoor ist halt eng)... mal sehen, ob ich mich traue.
Brushed habe ich selber nicht ... aber ich meine mal was gelesen zu haben ( Stichwort Pwm > 500Hz). Ich glaube cleanflight kann alles was baseflight macht. Wenn man seine Einstellungen gut sichert, kann man problemlos hin und her Flaschen.
Brushed habe ich selber nicht ... aber ich meine mal was gelesen zu haben ( Stichwort Pwm > 500Hz). Ich glaube cleanflight kann alles was baseflight macht. Wenn man seine Einstellungen gut sichert, kann man problemlos hin und her Flaschen.
Mit cleanflight geht es habe da schon selbst Versuche gemacht - 4kHz PWM Frequenz auf BlHeli ESC´s.
Nachteil ist der Timer Takt ist 1 MHz das bedeutet bei 4 kHz 250 Schritte Auslösung bzw bei 8 kHz 125 Schritte.
Bei der letzten Version mit dem Einpflegen von OneShot ist in dem Modus der Timer Takt auf 8 MHz erhöht worden das müsste dann beim Brushed Modus auch noch erfolgen.
Nachteil ist der Timer Takt ist 1 MHz das bedeutet bei 4 kHz 250 Schritte Auslösung bzw bei 8 kHz 125 Schritte.
Bei der letzten Version mit dem Einpflegen von OneShot ist in dem Modus der Timer Takt auf 8 MHz erhöht worden das müsste dann beim Brushed Modus auch noch erfolgen.
Habt ihr auch die Erfahrung gemacht, dass man bei der aktuellen Cleanflight-Version nicht über einen Aux-Schalter armen kann? Bleibt einfach rot und wird nicht grün, obwohl der Wert des Aux-Channels im zugewiesenen Bereich liegt..?! (andere Funktionen wie Horizon o.ä. lassen sich wie gewohnt aktivieren)
Nein - kann natürlich sein dass im Kombination mit bestimmten Features o.Ä. einen Bug gibt, aber ich habe gerade drei Copter auf cleanflight umgerüstet und auch ARM per Schalter geht einwandfrei.
(Wenn Telemetrie auf der ersten seriellen Schnittstelle aktiviert ist ... sehe ich das auch nicht in der GUI da ja die Telemetrie beim armen das MSP überschreibt - aber es geht, Motoren laufen an)
Save gedrückt, Gas geht unter mincheck? Falls ja, kannst Du ja nen Bugreport aufmachen, wenn Du eh die neuste Version bemüht hast.
(Wenn Telemetrie auf der ersten seriellen Schnittstelle aktiviert ist ... sehe ich das auch nicht in der GUI da ja die Telemetrie beim armen das MSP überschreibt - aber es geht, Motoren laufen an)
Save gedrückt, Gas geht unter mincheck? Falls ja, kannst Du ja nen Bugreport aufmachen, wenn Du eh die neuste Version bemüht hast.
Danke für die Tipps.
Gaswege hab ich natürlich kontrolliert und manuell über den Masterregler laufen auch alle Motoren bei ca. 1062 sauber an.
Bugreport mache ich keinen auf, weil bestimmt ich irgendwas falsch mache.. Aber ich komme schon noch drauf ;-)
Werde am WoE weiter forschen - nochmals danke!
Apropos, muss man irgendwas Spezielles beachten, wenn man an RX1/TX1 ein MinimOSD Rush (ebenfalls neueste Version 2.3) in Betrieb nehmen möchte? Ich schaffe nämlich keine Datenverbindung und erhalte keine Daten vom AfroMini.. Muss man dafür auch Telemetrie als Feature aktivieren?
Gaswege hab ich natürlich kontrolliert und manuell über den Masterregler laufen auch alle Motoren bei ca. 1062 sauber an.
Bugreport mache ich keinen auf, weil bestimmt ich irgendwas falsch mache.. Aber ich komme schon noch drauf ;-)
Werde am WoE weiter forschen - nochmals danke!
Apropos, muss man irgendwas Spezielles beachten, wenn man an RX1/TX1 ein MinimOSD Rush (ebenfalls neueste Version 2.3) in Betrieb nehmen möchte? Ich schaffe nämlich keine Datenverbindung und erhalte keine Daten vom AfroMini.. Muss man dafür auch Telemetrie als Feature aktivieren?
Moin!
Ich hab endlich meine neuen Mini fertig wie schon lange gewünscht/geplant mit vielen (für mich) schönen neuen Details, der erste selbstentworfene CF Rahmen von Binolein gefräst (Design ist noch verbesserungsfähig, dazu mehr wenn er mal vernüftig fliegt), 1306+3S+Gemfam4045, 12A Kiss, XT30, Afro Mini, Spektrum Sat, Gewicht mit 97g ohne Lipo wie angestrebt unter 100g.
Mit der für mich neuen Afro Mini & baseflight kam ich schneller&besser zurecht als erwartet (nur bis die Kiss liefen/ready zeigten war irgendwie viel Stochern im Nebel), aber jetzt häng ich unerwartet an anderer Stelle, wo ich bsiher bei IMU6050 bzw. MultiwWii nie Stress hatte, flog immer gut, egal ob die FC mit Spucke oder der Hilti befestigt war...
Aber hier schaukeln sich Motoren/Copter schon kurz über mintrottle auf mit Vibrationen, sie es in der Hand oder beim Versuch zu Fliegen (schaukelt sich immer mehr auf und ist praktisch unfliegbar). Erst bei viel Gas/nahe Vollgas (in der Hand) scheint alles wieder sauber/ohne Vibs und komischerwesie auch, wenn ich von Vollgas wieder gas wegnehme. Nur in die andere Richtung/wenn ich Gas gebe (und auch halte) diese extremen und aufschaukelnden Vibs. Die Motoren werden auch schon nach wenigen Sekunden sehr warm trotz vielleicht gerade mal Schwebegas.
Drehrichtung/Props, Motorenreihenfolge stimmt alles, er verhält sich auch grundsätzlich beim Kippen und Steuern richtig, nur eben als wären PIDs bei völligen Extremwerten oder die FC auf einer Rüttelplatte...
Wo such ich da? FC Befestigung? PIDs? Anderes? Alles zusammen?
Die FC ist mit ca. 4mm doppelseitg klebendem FC/RX-Schaumstofftaper mittig im Rahmen. Braucht die es härter? Oder noch weicher? Der Rahmen ist nicht ganz so steif wie erhofft, aber ich glaube irgendwie nicht, dass das schon bei Schwebegas solche Probleme machen kann, wenn eher bei viel Gas/Vollgas.
Baseflight Settings samt PIDs sind defaults und auf den ersten Blick sehen mir die PIDs wie gewohnt bei meinem MultiWii 2.1 aus. Ein wenig PID Tuning ok, aber kann es so völlig daneben sein mit defaults? Wenn ich jetzt eine NanoWii mit defaults draufsetze, fliegt das Ding 1a, da bin ich mir sicher.
Ist da bei baseflight/Naze was bezüglich PIDs, wo man unbedingt dran drehen muss? Oder muss für die Kiss was speziell eingeschaltet oder geändert werden?
Danke&Gruß
Jo
Ich hab endlich meine neuen Mini fertig wie schon lange gewünscht/geplant mit vielen (für mich) schönen neuen Details, der erste selbstentworfene CF Rahmen von Binolein gefräst (Design ist noch verbesserungsfähig, dazu mehr wenn er mal vernüftig fliegt), 1306+3S+Gemfam4045, 12A Kiss, XT30, Afro Mini, Spektrum Sat, Gewicht mit 97g ohne Lipo wie angestrebt unter 100g.
Mit der für mich neuen Afro Mini & baseflight kam ich schneller&besser zurecht als erwartet (nur bis die Kiss liefen/ready zeigten war irgendwie viel Stochern im Nebel), aber jetzt häng ich unerwartet an anderer Stelle, wo ich bsiher bei IMU6050 bzw. MultiwWii nie Stress hatte, flog immer gut, egal ob die FC mit Spucke oder der Hilti befestigt war...
Aber hier schaukeln sich Motoren/Copter schon kurz über mintrottle auf mit Vibrationen, sie es in der Hand oder beim Versuch zu Fliegen (schaukelt sich immer mehr auf und ist praktisch unfliegbar). Erst bei viel Gas/nahe Vollgas (in der Hand) scheint alles wieder sauber/ohne Vibs und komischerwesie auch, wenn ich von Vollgas wieder gas wegnehme. Nur in die andere Richtung/wenn ich Gas gebe (und auch halte) diese extremen und aufschaukelnden Vibs. Die Motoren werden auch schon nach wenigen Sekunden sehr warm trotz vielleicht gerade mal Schwebegas.
Drehrichtung/Props, Motorenreihenfolge stimmt alles, er verhält sich auch grundsätzlich beim Kippen und Steuern richtig, nur eben als wären PIDs bei völligen Extremwerten oder die FC auf einer Rüttelplatte...
Wo such ich da? FC Befestigung? PIDs? Anderes? Alles zusammen?
Die FC ist mit ca. 4mm doppelseitg klebendem FC/RX-Schaumstofftaper mittig im Rahmen. Braucht die es härter? Oder noch weicher? Der Rahmen ist nicht ganz so steif wie erhofft, aber ich glaube irgendwie nicht, dass das schon bei Schwebegas solche Probleme machen kann, wenn eher bei viel Gas/Vollgas.
Baseflight Settings samt PIDs sind defaults und auf den ersten Blick sehen mir die PIDs wie gewohnt bei meinem MultiWii 2.1 aus. Ein wenig PID Tuning ok, aber kann es so völlig daneben sein mit defaults? Wenn ich jetzt eine NanoWii mit defaults draufsetze, fliegt das Ding 1a, da bin ich mir sicher.
Ist da bei baseflight/Naze was bezüglich PIDs, wo man unbedingt dran drehen muss? Oder muss für die Kiss was speziell eingeschaltet oder geändert werden?
Danke&Gruß
Jo
hi jo
ich tippe mal auf zu weichen frame. Das sind wohl resonanzvibrationen, mit mehr gas kommst du da raus und der kopter ist fliegbar. zeig doch mal den frame, bzw wie isser ausfgebaut. der antrieb und props sind ja bei dir wie immer gut gewählt von daher denke ich nicht es kommt daher. naze braucht es auch, wie nanowii, etwas härter bei der Lagerung. Eigentlich fliegen die kleinen zwerge mit 1806-2206 und 5bis 6 zoll ganz ordentlich mit standard pids, von daher tippe ich auf den frame. teste doch mal mit einer andren propgrösse ob sich der schwingungsbereich verlagert .
ich tippe mal auf zu weichen frame. Das sind wohl resonanzvibrationen, mit mehr gas kommst du da raus und der kopter ist fliegbar. zeig doch mal den frame, bzw wie isser ausfgebaut. der antrieb und props sind ja bei dir wie immer gut gewählt von daher denke ich nicht es kommt daher. naze braucht es auch, wie nanowii, etwas härter bei der Lagerung. Eigentlich fliegen die kleinen zwerge mit 1806-2206 und 5bis 6 zoll ganz ordentlich mit standard pids, von daher tippe ich auf den frame. teste doch mal mit einer andren propgrösse ob sich der schwingungsbereich verlagert .
>ich tippe mal auf zu weichen frame. Das sind wohl resonanzvibrationen, mit mehr gas kommst du da raus und der kopter ist fliegbar.
Das wär aber ärgerlich beim ersten und so lang drauf gewartet...
>teste doch mal mit einer andren propgrösse ob sich der schwingungsbereich verlagert
größer kann ich nicht, also muss ich jetzt auch mal 4" stutzen... Oder 2S versuchen.
Trotdzem wundert mich die Intensität mit der es sofort passiert. Werde wohl besser mal ein Video machen...
Vielleicht noch als Ergänzung/Anhaltspunkt: Die Vibs sind ohne Props gleich, als auch leer rubbelt's wie blöd und wird erst gegen Vollgas hin sauber.
Das wär aber ärgerlich beim ersten und so lang drauf gewartet...
>teste doch mal mit einer andren propgrösse ob sich der schwingungsbereich verlagert
größer kann ich nicht, also muss ich jetzt auch mal 4" stutzen... Oder 2S versuchen.
Trotdzem wundert mich die Intensität mit der es sofort passiert. Werde wohl besser mal ein Video machen...
Vielleicht noch als Ergänzung/Anhaltspunkt: Die Vibs sind ohne Props gleich, als auch leer rubbelt's wie blöd und wird erst gegen Vollgas hin sauber.
Andere Props kann ich mir wohl schenken, wenn es auch ohne Props ist.
Mit 2S ist es weniger, aber immer noch massiv/unfliegbar.
>hast Du schon mal versucht in der BF App die Motoren einzeln anzusteuern/testen ob einer die Vibs produziert?
Danke, die Möglichkeit kannte ich von MW noch gar nicht. Motoren laufen einzeln über die GUI und auch alle zusammen über "Master" wie ein Uhrwerk und bleiben auch bei Vollgas mit Props samt ESCs kalt.
PID (alle drei) hab ich immer weiter runtergedreht (erst wie bei anderen Coptern nur P&D auf die Hälfte und ein Drittel, verschiebt die Vibs etwas nach oben beim Gas, aber dann gleich schlimm), bei 1/10(!) ist er im Prinzip vib.frei, also P=0,4, I=0,003, D=2. Das wird aber wohl nicht fliegbar sein (probiers gleich mal).
Sonst mach ich mal die FC mit doppelseitigem Klebeband "hart" fest. Wird schon werden!
Mit 2S ist es weniger, aber immer noch massiv/unfliegbar.
>hast Du schon mal versucht in der BF App die Motoren einzeln anzusteuern/testen ob einer die Vibs produziert?
Danke, die Möglichkeit kannte ich von MW noch gar nicht. Motoren laufen einzeln über die GUI und auch alle zusammen über "Master" wie ein Uhrwerk und bleiben auch bei Vollgas mit Props samt ESCs kalt.
PID (alle drei) hab ich immer weiter runtergedreht (erst wie bei anderen Coptern nur P&D auf die Hälfte und ein Drittel, verschiebt die Vibs etwas nach oben beim Gas, aber dann gleich schlimm), bei 1/10(!) ist er im Prinzip vib.frei, also P=0,4, I=0,003, D=2. Das wird aber wohl nicht fliegbar sein (probiers gleich mal).
Sonst mach ich mal die FC mit doppelseitigem Klebeband "hart" fest. Wird schon werden!
FC nur mit doppelseitigem Klebeband ist auch nicht besser... :-(
Wie kann ich zumindest mal testweise (=wirksam aber reversibel) den Rahmen verstärken? Ich hab noch einen 5" Rahmen gleicher Machart (auch CF) und mit gleicher Innenfläche (nur längere Arme), der definitiv zu weich und wohl kaum nutzbar ist, da könnte ich theoretisch die Motorhalter außen absägen und ihn dann drunter pappen. Wie am besten? Kleber (welcher?) oder geht evtl. auch doppelseitiges Klebeband? Im Prinzip müsste ich aber vermutlich nur die
Hier mal Bildi das aufgebauten 4er und des leeren 5ers. Die großen ESC da heißen übrigens Kiss...
Auf dem dxf sahen die Arme gar nicht so schmal aus, eigentlich passend für 4" und 1306, aber in real, puh.... Trotz üppigen 2,5mm Rahmendicke ist er recht weich (aber das es für PID schon soooo schlimm sein soll?). Ich mag halt so breite Arme bei so kleinen Props nicht. Aber scheinbar geht es bei solchen "Plattenrahmen" mit der Steifigkeit nicht anders, na, was für den nächsten gelernt...
Wie kann ich zumindest mal testweise (=wirksam aber reversibel) den Rahmen verstärken? Ich hab noch einen 5" Rahmen gleicher Machart (auch CF) und mit gleicher Innenfläche (nur längere Arme), der definitiv zu weich und wohl kaum nutzbar ist, da könnte ich theoretisch die Motorhalter außen absägen und ihn dann drunter pappen. Wie am besten? Kleber (welcher?) oder geht evtl. auch doppelseitiges Klebeband? Im Prinzip müsste ich aber vermutlich nur die
Hier mal Bildi das aufgebauten 4er und des leeren 5ers. Die großen ESC da heißen übrigens Kiss...
Auf dem dxf sahen die Arme gar nicht so schmal aus, eigentlich passend für 4" und 1306, aber in real, puh.... Trotz üppigen 2,5mm Rahmendicke ist er recht weich (aber das es für PID schon soooo schlimm sein soll?). Ich mag halt so breite Arme bei so kleinen Props nicht. Aber scheinbar geht es bei solchen "Plattenrahmen" mit der Steifigkeit nicht anders, na, was für den nächsten gelernt...
Anhänge
-
 229,1 KB Aufrufe: 19
229,1 KB Aufrufe: 19 -
 226,6 KB Aufrufe: 23
226,6 KB Aufrufe: 23
- Status
- Nicht offen für weitere Antworten.

