
CX2Fold Heavy Lift, Klappkopter für schwere Kameras
- Themenstarter hexacop
- Beginndatum
Den normalen Mixer habe ich nicht getestet, wozu auch?
Den nackten Rahmen habe ich leider vor dem Zusammenbau nicht gewogen, der wiegt aber komplett flugfertig ohne Akku 3,4Kg mit oben genannten Komponenten. Das Gewicht wird je nach Motoren und Reglern noch leicht abweichen aber mit dem Rahmen kommt man nur mit der Gopro unter 5 Kg
Das Ziel ist eine ordentliche Kamerahalterung und eine 2-3Kg Kamera drauf zu packen zu können.
Den nackten Rahmen habe ich leider vor dem Zusammenbau nicht gewogen, der wiegt aber komplett flugfertig ohne Akku 3,4Kg mit oben genannten Komponenten. Das Gewicht wird je nach Motoren und Reglern noch leicht abweichen aber mit dem Rahmen kommt man nur mit der Gopro unter 5 Kg
Das Ziel ist eine ordentliche Kamerahalterung und eine 2-3Kg Kamera drauf zu packen zu können.
Mir leuchtet immer noch nicht der Sinn ein, warum die oberen Propeller langsamer drehen sollen als die unteren? Dann ist doch die Lastverteilung auch unterschiedlich. Hast du dann nicht ein Drehmomentversatz? Denke hier an den Koax, der auch nur stabil steht, wenn beide Rotoren gleich drehen.
Zuletzt bearbeitet:
Die Theorie der Coax Kombi geht ja so, dass der untere Prop im Luftstrom des oberen arbeitet und daher schneller drehen sollte, um nochmal mehr draufpacken zu können. Wobei das meinerseits auch nur wiedergekautes Forumswissen ist und die Meinung gehen hier auseinander, gerade vom Ferdl war auch schon wieder anderes zu hören. Insofern hätte mich interessiert, ob Hexa gerade auch mit der Telemetrieausstattung was rauslesen kann, ob es bei Coax Props mit unterschiedlichen Geschwindigkeiten effizienter ist.
coole Sache! ICh hab bei meinem Koax auch etwas mit der Mixertabelle experimentiert. Leider konnte ich mangels Telemetrie nur über die Stellung des Gassticks im manuellen Modus herausfinden was besser war und ich war auch selbst überrascht dass die Einstellung aller Motoren bei 100% die Beste war. Fand ich auch ungewöhnlich aber war so. Vielleicht komme ich diese Woche dazu das Ganze nochmal über die Telemetrie zu verifizieren...
Gruß
Matthias
Gruß
Matthias
Bin heute mal wieder geflogen mit 6,8kg Gewicht und da lag der Schwebestrom bei 55-57A.
Die Auswertung der Telemetriedaten per Logview lässt noch etwas zu wünschen übrig, es sind nicht alle Daten vorhanden. Im wesentlichen fehlt die Spannung, Leistung sowie Höhe.
Auch der Vergleich der einzelnen Motoren ist etwas unübersichtlich was aber auch an der Logview Einstellung liegen kann. Habe noch keine Möglichkeit gefunden die Stromwerte auf der Y Achse zu vereinheitlichen.
Der Schwerpunkt hat wohl auch nicht ganz gestimmt, da ich einfach noch 2 Akkus drauf geschnallt hatte um mit etwas mehr Gewicht testen zu können.
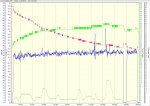
So sieht der Stromverlaug pro Motor aus:
und die Temperaturen bei 26° Außentemperatur:

Der Mischer ist wie gesagt so eingestellt das jede Ebene für sich einen Quadro bildet und jedes Motorpaar entgegengesetzt zum anderen dreht, das Drehmoment bleibt immer gleich selbst wenn man die obere Ebene langsamer drehen lässt.
Aber das muss ich jetzt mit verschiedenen Einstellungen und Props ausmessen ob ein Eingriff in den Mischer tatsächlich lohnt. Wobei der primäre Grund der war das der DJI Mischer eine andere Drehrichtung vorgibt die nicht redundant und auch nicht Drehmomentfrei arbeitet.
Die Auswertung der Telemetriedaten per Logview lässt noch etwas zu wünschen übrig, es sind nicht alle Daten vorhanden. Im wesentlichen fehlt die Spannung, Leistung sowie Höhe.
Auch der Vergleich der einzelnen Motoren ist etwas unübersichtlich was aber auch an der Logview Einstellung liegen kann. Habe noch keine Möglichkeit gefunden die Stromwerte auf der Y Achse zu vereinheitlichen.
Der Schwerpunkt hat wohl auch nicht ganz gestimmt, da ich einfach noch 2 Akkus drauf geschnallt hatte um mit etwas mehr Gewicht testen zu können.
So sieht der Stromverlaug pro Motor aus:
und die Temperaturen bei 26° Außentemperatur:
Der Mischer ist wie gesagt so eingestellt das jede Ebene für sich einen Quadro bildet und jedes Motorpaar entgegengesetzt zum anderen dreht, das Drehmoment bleibt immer gleich selbst wenn man die obere Ebene langsamer drehen lässt.
Aber das muss ich jetzt mit verschiedenen Einstellungen und Props ausmessen ob ein Eingriff in den Mischer tatsächlich lohnt. Wobei der primäre Grund der war das der DJI Mischer eine andere Drehrichtung vorgibt die nicht redundant und auch nicht Drehmomentfrei arbeitet.
Wookong Mixer vergleich
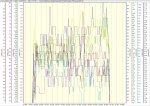
Es ist mit jetzt gelungen wenn auch nur temporär die Y Achsen anzugleichen um die Stromwerte besser vergleichen zu können.
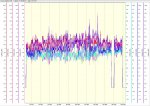
Die erste Kurve zeigt den Verlauf der Motorströme bei 3 verschiedenen Mixer Einstellungen. In den Pausen dazwischen habe ich den Mixer umgestellt ohne den Akku abzustecken.
Links 90/100, Mitte 95/100 Rechts 100/100, d.h. obere Ebene langsamer (90% bzw. 95%)

Mixer 90% oben 100% unten

Mixer 95% oben 100% unten

Mixer 100% oben 100% unten
Ich denke ich bleibe bei der 90/100 Einstellung.
Es ist mit jetzt gelungen wenn auch nur temporär die Y Achsen anzugleichen um die Stromwerte besser vergleichen zu können.
Die erste Kurve zeigt den Verlauf der Motorströme bei 3 verschiedenen Mixer Einstellungen. In den Pausen dazwischen habe ich den Mixer umgestellt ohne den Akku abzustecken.
Links 90/100, Mitte 95/100 Rechts 100/100, d.h. obere Ebene langsamer (90% bzw. 95%)
Mixer 90% oben 100% unten
Mixer 95% oben 100% unten
Mixer 100% oben 100% unten
Ich denke ich bleibe bei der 90/100 Einstellung.
Respekt Hexa, danke für's teilen. Kann man das jetzt so interpretieren, dass der Gesamtverbrauch ähnlich ist, bei dem 90/100 mixer aber oben/unten gleichmäßiger belastet werden? War das alles im schweben, wegen schubvergleich? Wenn ja könnte man schlussfolgern, dass die unterschiedlichen mixer in bezug auf verbrauch/schub gleich effizient sind, oder?
Die Leistungsaufnahme bleibt in jedem Fall gleich, nur die Lastverteilung auf die Motoren ist unterschiedlich. Darum ging es mir auch im wesentlichen, den Mixer so einzustellen, das die Motoren und Regler gleichmäßig belastet werden. Das es bei einem 100/100 Mixer nicht der Fall ist wusste ich schon von früheren Messungen die ich mit meinem ersten Coax Kopter mit MK FC gebaut hatte. Beim MK Mixer kann man allerdings die Drehzahl der unteren Motoren anheben, was erstmals besser klingt als bei DJI wo man die Drehzahl der oberen Motoren absenken muss. Wobei ich das bei DJI mal probieren werde ob Werte über 100% möglich sind.
DJI Support hat diesbezüglich natürlich keine Hilfe geleistet obwohl es in der Anleitung steht man sollte sie kontaktieren wenn man den Mixer verändert.
Wenn meine 6S Akkus kommen werde ich noch ein paar Testreihen machen und die Ergebnisse hier posten. Ich denke 85% zu 100% wäre durchaus möglich für Schwebeflug. Schwebeflug ist aber nicht alles, da muss ich auch ein paar kräftige Steigflüge machen um zu sehen wie 1. der Kopter reagiert, 2. die Leistungsverteilung und 3. ob doch eine minimale Steigerung der Effektivität möglich ist.
Hoffe das ich noch eine neue Firmware kriege, die Telemetrie Daten sind noch nicht vollständig und mit Logview muss ich mich auch auseinandersetzen, es ist nicht gerade intuitiv.
DJI Support hat diesbezüglich natürlich keine Hilfe geleistet obwohl es in der Anleitung steht man sollte sie kontaktieren wenn man den Mixer verändert.
Wenn meine 6S Akkus kommen werde ich noch ein paar Testreihen machen und die Ergebnisse hier posten. Ich denke 85% zu 100% wäre durchaus möglich für Schwebeflug. Schwebeflug ist aber nicht alles, da muss ich auch ein paar kräftige Steigflüge machen um zu sehen wie 1. der Kopter reagiert, 2. die Leistungsverteilung und 3. ob doch eine minimale Steigerung der Effektivität möglich ist.
Hoffe das ich noch eine neue Firmware kriege, die Telemetrie Daten sind noch nicht vollständig und mit Logview muss ich mich auch auseinandersetzen, es ist nicht gerade intuitiv.
Andreas schreibt für Logview gerade eine Anleitung die er uns dann zukommen lässt. Ich hab es noch nicht zum Laufen bekommen weil ich die ini Datei nicht in Logview importieren kann. Ist ausgegraut.
Aber wenn ich alles sauper analysieren kann dann werde ich viel am Mixer schrauben um zu verstehen was die Regelung genau macht.
Aber wenn ich alles sauper analysieren kann dann werde ich viel am Mixer schrauben um zu verstehen was die Regelung genau macht.
Ja das wäre super wenn von Andreas bald etwas kommen würde, ich bin den Umweg über Jlog gegangen, da kommt der Logger nämlich her ;-)
Man braucht eine LOV Datei für den Herkules, erst dann erkennt LV das Device HERKULES-HTI.
Dann wählt man das Gerät in "Gerät und Port" aus, der Port spielt hier keine Rolle.
Dann importiert man ein "Device File", also einen Logfile, "importieren", nicht "öffnen"!
Es gibt 6 Kanäle in jedem Logfile, aber leider finde ich nicht alle Daten da drin ...
Man braucht eine LOV Datei für den Herkules, erst dann erkennt LV das Device HERKULES-HTI.
Dann wählt man das Gerät in "Gerät und Port" aus, der Port spielt hier keine Rolle.
Dann importiert man ein "Device File", also einen Logfile, "importieren", nicht "öffnen"!
Es gibt 6 Kanäle in jedem Logfile, aber leider finde ich nicht alle Daten da drin ...
Ich habe o.g. Test wiederholt und die Daten noch mal verglichen. Damit ich es besser ausrechnen kann, habe ich alle Datensätze in Excel geschoben und ein paar Berechnungen über die relevanten Flugabschnitte gemacht.
Den Mixer hatte ich diesmal in 4 Stufen eingestellt, 85,90,95,100
Hier die Zusammenfassung der Durchschnittsströme pro Ebene
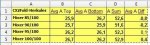
Mit einer Mixereinstellung zwischen 92/100 und 94/100 sollte der Stromverbrauch pro Motorebene optimal sein. Das dürfte sich leicht verschieben z.b. wenn die Motorebenen weiter auseinander liegen, meine Propeller haben einen Abstand von 8cm.
O.g. Strommessung an 5S 3P (21,8Ah) mit 15x5,5 Zoll Props auf MN4010-11 T-Motor
Den Mixer hatte ich diesmal in 4 Stufen eingestellt, 85,90,95,100
Hier die Zusammenfassung der Durchschnittsströme pro Ebene
Mit einer Mixereinstellung zwischen 92/100 und 94/100 sollte der Stromverbrauch pro Motorebene optimal sein. Das dürfte sich leicht verschieben z.b. wenn die Motorebenen weiter auseinander liegen, meine Propeller haben einen Abstand von 8cm.
O.g. Strommessung an 5S 3P (21,8Ah) mit 15x5,5 Zoll Props auf MN4010-11 T-Motor
Die 6S Akkus sind gekommen und Andreas hat auch die aktuelle Firmware mit allen Optionen freigegeben.
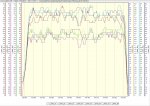
Bin heute mal zum Test die 6S (2x 5800) geflogen, hier die Auswertung.
Koptergewicht 5,7kg, Flugzeit knappe 18 min, bei etwa 38A im Schnitt, bin bei 16' kurz gelandet weil die Telemetrie Alarm gegeben hat, dabei war das nur die 10000mA Warnung.
Der Mixer ist jetzt auf 93/100 eingestellt.
Bin heute mal zum Test die 6S (2x 5800) geflogen, hier die Auswertung.
Koptergewicht 5,7kg, Flugzeit knappe 18 min, bei etwa 38A im Schnitt, bin bei 16' kurz gelandet weil die Telemetrie Alarm gegeben hat, dabei war das nur die 10000mA Warnung.
Der Mixer ist jetzt auf 93/100 eingestellt.

