
Rabbit Flight Controller
- Themenstarter der-Frickler
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Ich hät gern mal ne Frage ...*g*
geht denn bei euch der CF Modus ?
ich habe das Problem wenn nach vorn steuer das der Copter im CF Modus nach links fliegt.... wtf?
^^ich
was muss man bei der Kompass Kalibrierung beachten?
Muss man den vor allem nach Nord ausrichzen?
alles andere Funkt. super...hab die neuste Firmware....
geht denn bei euch der CF Modus ?
ich habe das Problem wenn nach vorn steuer das der Copter im CF Modus nach links fliegt.... wtf?
^^ich
was muss man bei der Kompass Kalibrierung beachten?
Muss man den vor allem nach Nord ausrichzen?
alles andere Funkt. super...hab die neuste Firmware....
Ich hät gern mal ne Frage ...*g*
geht denn bei euch der CF Modus ?
ich habe das Problem wenn nach vorn steuer das der Copter im CF Modus nach links fliegt.... wtf?
^^ich
was muss man bei der Kompass Kalibrierung beachten?
Muss man den vor allem nach Nord ausrichzen?
alles andere Funkt. super...hab die neuste Firmware....
geht denn bei euch der CF Modus ?
ich habe das Problem wenn nach vorn steuer das der Copter im CF Modus nach links fliegt.... wtf?
^^ich
was muss man bei der Kompass Kalibrierung beachten?
Muss man den vor allem nach Nord ausrichzen?
alles andere Funkt. super...hab die neuste Firmware....
Hallo Ganymed,
hm, ist das hier "das große"? http://www.goodluckbuy.com/rabbit-f...-with-fixed-hight-direction-care-free-cf.html
Gruß
Günther
hm, ist das hier "das große"? http://www.goodluckbuy.com/rabbit-f...-with-fixed-hight-direction-care-free-cf.html
Gruß
Günther
Hallo!
Ich heiße Markus und bin neu im Forum!
Ich muß gestehen, mir nicht den ganzen thread über den Rabbit Flight Controller durchgelesen zu haben!
Aber vilelleicht kann mir jemand meine Frage trotzdem beantworten:
Gibt es für den Rabbit Flight Controller mit dem GPS Module eine Möglichkeit Anzeige der GPS Koordinaten in der Bildübertragung?
Danke im Voraus für die Antworten
Grüße Markus
Ich heiße Markus und bin neu im Forum!
Ich muß gestehen, mir nicht den ganzen thread über den Rabbit Flight Controller durchgelesen zu haben!
Aber vilelleicht kann mir jemand meine Frage trotzdem beantworten:
Gibt es für den Rabbit Flight Controller mit dem GPS Module eine Möglichkeit Anzeige der GPS Koordinaten in der Bildübertragung?
Danke im Voraus für die Antworten
Grüße Markus
Hi,
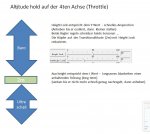
hab mal die Carefreefunktion in eine Grafik gepackt. Vielleicht könnt ihr ja die Funktion mal überprüfen ob es so hinhaut, oder ob es sich doch nur um Heading und Height hold handelt ...
Huhu Markus,
der Rabbit FC an sich kann die Koordinaten nicht darstellen, aber das kannst du z.B mit einem
OSD oder Telemetrie System machen.
so long
Lars
hab mal die Carefreefunktion in eine Grafik gepackt. Vielleicht könnt ihr ja die Funktion mal überprüfen ob es so hinhaut, oder ob es sich doch nur um Heading und Height hold handelt ...
Huhu Markus,
der Rabbit FC an sich kann die Koordinaten nicht darstellen, aber das kannst du z.B mit einem
OSD oder Telemetrie System machen.
so long
Lars
Anhänge
-
 92,6 KB Aufrufe: 31
92,6 KB Aufrufe: 31
Zuletzt bearbeitet:
Es gibt eine neue Hasensoftware:
http://www.rcgroups.com/forums/showthread.php?t=1564594&page=149#post21211769
1. improved the way the fc determines "no throttle stick movement" in order to enter "height lock" mode
2. Unltrsonic height lock now works upto 2.5m. When the rotor is climbing, HL will change over from ultrasonic to baro at 2.5m, when decending, changeover from baro to ultrasonic at 1.5m
3. correct the case when while releasing the sticks for GPS position hold, the fc reacts as GO Home sometimes
4. fine tuned the GPS Go Home speed
5. Resoved the problem that at times, while doing the FW upgrade with battery plugged-in, the motor would suddently start..
6 correct sometimes while not activated the GPS position hold, the rotor's levelling is out...
It is too bad that the 500Hz ESC issue seems not be addressed this time and some buddies in China already got problem with the XA type ESC.. I would suggest those working with these type of ESC don't do the upgrade now until we understand more on this problem
http://www.rcgroups.com/forums/showthread.php?t=1564594&page=149#post21211769
1. improved the way the fc determines "no throttle stick movement" in order to enter "height lock" mode
2. Unltrsonic height lock now works upto 2.5m. When the rotor is climbing, HL will change over from ultrasonic to baro at 2.5m, when decending, changeover from baro to ultrasonic at 1.5m
3. correct the case when while releasing the sticks for GPS position hold, the fc reacts as GO Home sometimes
4. fine tuned the GPS Go Home speed
5. Resoved the problem that at times, while doing the FW upgrade with battery plugged-in, the motor would suddently start..
6 correct sometimes while not activated the GPS position hold, the rotor's levelling is out...
It is too bad that the 500Hz ESC issue seems not be addressed this time and some buddies in China already got problem with the XA type ESC.. I would suggest those working with these type of ESC don't do the upgrade now until we understand more on this problem
hab gerade geupdatet, GPS lässt sich nicht deaktivieren (bzw wird automatisch wieder aktiviert) und Einzelzellspannung geht auch wieder auf default zurück... Hat sonst schon jemand getestet?
Läuft das GPS mitterweile?
Läuft das GPS mitterweile?
Es gibt eine neue Hasensoftware:
http://www.rcgroups.com/forums/showthread.php?t=1564594&page=149#post21211769
1. improved the way the fc determines "no throttle stick movement" in order to enter "height lock" mode
2. Unltrsonic height lock now works upto 2.5m. When the rotor is climbing, HL will change over from ultrasonic to baro at 2.5m, when decending, changeover from baro to ultrasonic at 1.5m
3. correct the case when while releasing the sticks for GPS position hold, the fc reacts as GO Home sometimes
4. fine tuned the GPS Go Home speed
5. Resoved the problem that at times, while doing the FW upgrade with battery plugged-in, the motor would suddently start..
6 correct sometimes while not activated the GPS position hold, the rotor's levelling is out...
It is too bad that the 500Hz ESC issue seems not be addressed this time and some buddies in China already got problem with the XA type ESC.. I would suggest those working with these type of ESC don't do the upgrade now until we understand more on this problem
http://www.rcgroups.com/forums/showthread.php?t=1564594&page=149#post21211769
1. improved the way the fc determines "no throttle stick movement" in order to enter "height lock" mode
2. Unltrsonic height lock now works upto 2.5m. When the rotor is climbing, HL will change over from ultrasonic to baro at 2.5m, when decending, changeover from baro to ultrasonic at 1.5m
3. correct the case when while releasing the sticks for GPS position hold, the fc reacts as GO Home sometimes
4. fine tuned the GPS Go Home speed
5. Resoved the problem that at times, while doing the FW upgrade with battery plugged-in, the motor would suddently start..
6 correct sometimes while not activated the GPS position hold, the rotor's levelling is out...
It is too bad that the 500Hz ESC issue seems not be addressed this time and some buddies in China already got problem with the XA type ESC.. I would suggest those working with these type of ESC don't do the upgrade now until we understand more on this problem
Zuletzt bearbeitet:
also: Flug mit der neuen Software vom 01.04 lief gut. Höhe schwankt noch ordentlich, muss ich anpassen...Wo sind eure Werte für die Höhe ca (Quadro XL)? Hab jetzt High Lock auf knapp 90 und Auxheight auf ca. 60.
Wenn ihr die Software updatet, keinen Lipo dranhängen, dann können die Motoren auch nicht mit voller Leisung anlaufen.
Wenn ihr die Software updatet, keinen Lipo dranhängen, dann können die Motoren auch nicht mit voller Leisung anlaufen.
Hi Hasenfreunde
Ich würde gerne meine Quadrixette 40 mit dem Rabbit Board ausrüsten....doch ich verzweifle langsam.
Kann mir jemand eine Step by Step Erklärung abgeben? Es geht um die Installation der Software auf dem PC.
Ich arbeite mit Windows7...
Ich würde gerne meine Quadrixette 40 mit dem Rabbit Board ausrüsten....doch ich verzweifle langsam.
Kann mir jemand eine Step by Step Erklärung abgeben? Es geht um die Installation der Software auf dem PC.
Ich arbeite mit Windows7...
2. Doppelklick auf Setup(32bit).bat oder Setup(64bit).bat.
3. Programm starten und passenden Com-Port wählen.
- Status
- Nicht offen für weitere Antworten.

