Ich denke beim Car an der Lenkung wird keine Sensorsteuerung der Empfindlichkeit vernünftig zu fahren sein.
Vor allem weil damit ja nicht die Ansteuerpräzision verbessert wird.
Ich denke mit Expo auf der Lenkung ist man gut unterwegs. Vor allem hat man dann ein gleichmäßiges Steuergefühl in den Fingern. Nichts ist schlimmer als eine fremde Macht, die da ständig regelt.
Was natürlich gut geht, wenn man es will und darf, ist ein Kreisel auf der Lenkung, hier kann man sehr gut die Kreiselempfindlichkeit über den Lenkausschlag des Steuerknlüppels anpassen.
Sigi
So,
ich habe Mal einige Stunden im Keller zugebracht und das Modell fertig gestellt. Leider hatte ich noch nicht die Gelegenheit, das Fahrverhalten im Freien zu testen. Erste Versuche im geschlossenen Raum lassen vermuten, dass der Vortrieb in etwa der Gasknüppelstellung sein wird. Ich habe mich - aufgrund eurer Empfehlungen - für eine "variable Exponentialsteuerung" entschieden. Das heißt, der Lenkausschlag bleibt immer gleich groß, allerdings wird die Auslenkung bei zunehmender Geschwindigkeit immer geringer. Wie stark die Exponentialfunktion ist, wird durch die Kurve "GV9" bestimmt und muss in der Praxis noch "erfahren" werden.
Hier nun meine Einstellungen:
Bild 1
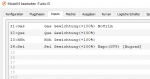
Bild 2 - Hilfsmischer CH10
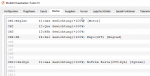
Bild 3 - die Kurve für Expo

Bild 4 - Entscheidend die SF20

Im Simulator kann man sehr gut verfolgen, wie bei einem gegebenen Seitenruder-Wert mit zunehmendem Gas der Ausschlag immer kleiner wird, da der Expo-Anteil auf Seite durch GV9 immer größer wird.
Bild 5 - Gasknüppel links AUS (CH01), Lenkung 50 % nach links (CH04) - GV9 = 0

Bild 6 - Halbgas - Lenkung immer noch 50% Ausschlag nach links - man beachte CH04 - GV9 = 40%

Bild 7 - Vollgas - Lenkung ebenfalls 50 % Ausschlag nach links - CH04 kaum noch eine Bewegung - GV9 = 80%

Das ganze funktioniert auch analog dazu bei einem Ausschlag nach rechts.
Und hier noch meine Konstruktion (neu sind nur die beiden Hinterräder
")

Gruß Udo




