FRSKY Vorsicht bei "Telemetrie verloren" mit Horus
- Themenstarter Carbonator
- Beginndatum


Ich kenne das Teil nicht. Entweder es hat HW Einstellmöglichkeit irgendwo am Gehäuse oder auf der Platine.
Oder es geht per SW, sowie beim MPM.
Oder du merkst dir einfach die Abweichung und rechnest es selber heraus.
Zum genauen Kalibrieren bräuchtest du eine Referenzsignalquelle.
Wie schon gesagt, die Taranis und das MPM, das du gemessen hast liegen c. 30kHz unterhalb.
Oder es geht per SW, sowie beim MPM.
Oder du merkst dir einfach die Abweichung und rechnest es selber heraus.
Zum genauen Kalibrieren bräuchtest du eine Referenzsignalquelle.
Wie schon gesagt, die Taranis und das MPM, das du gemessen hast liegen c. 30kHz unterhalb.
Zuletzt bearbeitet:
Nachtrag: das erste Bild Bindung FCC,
Das zweite freier lauf nach bind ende.
Ewald, wie kann ich das Teil "eichen"?
Grüsse Gruni
Das zweite freier lauf nach bind ende.
Ewald, wie kann ich das Teil "eichen"?
Grüsse Gruni
wenn dein Hack-RF einen temperaturkompensierten Quarzoszillator (TCXO) drin hat, sollte die Frequenzanzeige eigentlich ausreichend genau sein.

Mann kann mit SDR# einen UKW Sender mit bekannter Frequenz einstellen und in Sendepausen die Trägerfrequenz gut sehen.

Zu Beginn des Themas hatte ich von Engel Modellbau Sender mit ein paar XJT, IXJT, ISMR und Empfänger, welche als Rückläufer in die Kategorie der plötzlichen Servoausschläge fallen, und diese gemessen.
Auf Senderseite gibt es natürlich Streuung, aber keine Auffälligkeit bezüglich Frequenzabweichung.
Die liegen alle im Bereich von -30 bis -50kHz unterhalb der Nennfrequenz.
Wie schon mal erklärt wirkt sich diese kleine Toleranz der Sender beim G-RX8 aund R-XSR mit kleinem AFC Bereich stark aus. Der AFC Bereich ist mit neuer FW deutlich erweitert, wie bei den bewährten X8Rs.
Vor zwei Tagen hatte ich mein IRangeX getestet.
Es lassen sich die gleichen Datenfehler/Servoausschläge provozieren wie mit FrSky.
Die FW des Moduls ist eine unabhängige Eigenentwicklung (basierend auf Arduino IDE), welche die FrSky Funktion nachbildet. Da das MPM auch das CRC Verfahren von FrSky exakt nachbilden muß, um überhaupt zu funktionieren, hat es genau da auch die gleiche Schwachstelle.
Auf Senderseite gibt es natürlich Streuung, aber keine Auffälligkeit bezüglich Frequenzabweichung.
Die liegen alle im Bereich von -30 bis -50kHz unterhalb der Nennfrequenz.
Wie schon mal erklärt wirkt sich diese kleine Toleranz der Sender beim G-RX8 aund R-XSR mit kleinem AFC Bereich stark aus. Der AFC Bereich ist mit neuer FW deutlich erweitert, wie bei den bewährten X8Rs.
Vor zwei Tagen hatte ich mein IRangeX getestet.
Es lassen sich die gleichen Datenfehler/Servoausschläge provozieren wie mit FrSky.
Die FW des Moduls ist eine unabhängige Eigenentwicklung (basierend auf Arduino IDE), welche die FrSky Funktion nachbildet. Da das MPM auch das CRC Verfahren von FrSky exakt nachbilden muß, um überhaupt zu funktionieren, hat es genau da auch die gleiche Schwachstelle.
Zuletzt bearbeitet:
[/QUOTE]
Eine Kalibrierung ist trotzdem Notwendig. Ungenauigkeiten entstehen durch die Laufzeitunterschiede der Signale im Gerät und durch die begrenzte Reaktionszeit der Meßsensoren.
Beim HackRF scheint es so zu sein, daß die Zeitbasis (X-Achse) der Reaktionszeit der Messung vorraus ist. (in der Annahme, daß er die Frequenz von unten nach oben scannt)
Deshalb ist es ja so aufwendig Meßgeräte für alle Meßbereiche zu kalibrieren.
Auf einen UkW Sender in der Sendepause zu Kalibrieren ist eine gute Idee. Bleibt halt noch Unsicherheit verschiedener Meßbereiche.
Hallo Gruni,
wenn dein Hack-RF einen temperaturkompensierten Quarzoszillator (TCXO) drin hat, sollte die Frequenzanzeige eigentlich ausreichend genau sein.
.
wenn dein Hack-RF einen temperaturkompensierten Quarzoszillator (TCXO) drin hat, sollte die Frequenzanzeige eigentlich ausreichend genau sein.
.
Beim HackRF scheint es so zu sein, daß die Zeitbasis (X-Achse) der Reaktionszeit der Messung vorraus ist. (in der Annahme, daß er die Frequenz von unten nach oben scannt)
Deshalb ist es ja so aufwendig Meßgeräte für alle Meßbereiche zu kalibrieren.
Auf einen UkW Sender in der Sendepause zu Kalibrieren ist eine gute Idee. Bleibt halt noch Unsicherheit verschiedener Meßbereiche.
Zuletzt bearbeitet:
Hat überhaupt jemand einen problematischen "neuen" Sender zum Messen? Dass die Funktionierenden funktionieren muss man ja nicht messen ")
zunächst muss man ja erstmal sehen, wie man es "messen" und nachweisen kann.
Falls dann mal endlich ein kritischer Sender zur Verfügung steht, hat man sich zumindest mal eine gewisse Erfahrung und die Mittel der Auswertung 😊😊😊
Neugierige Grüsse Gruni

Eine Kalibrierung ist trotzdem Notwendig. Ungenauigkeiten entstehen durch die Laufzeitunterschiede der Signale im Gerät und durch die begrenzte Reaktionszeit der Meßsensoren.
Beim HackRF scheint es so zu sein, daß die Zeitbasis (X-Achse) der Reaktionszeit der Messung vorraus ist. (in der Annahme, daß er die Frequenz von unten nach oben scannt)
Deshalb ist es ja so aufwendig Meßgeräte für alle Meßbereiche zu kalibrieren.
Auf einen UkW Sender in der Sendepause zu Kalibrieren ist eine gute Idee. Bleibt halt noch Unsicherheit verschiedener Meßbereiche.
Beim HackRF scheint es so zu sein, daß die Zeitbasis (X-Achse) der Reaktionszeit der Messung vorraus ist. (in der Annahme, daß er die Frequenz von unten nach oben scannt)
Deshalb ist es ja so aufwendig Meßgeräte für alle Meßbereiche zu kalibrieren.
Auf einen UkW Sender in der Sendepause zu Kalibrieren ist eine gute Idee. Bleibt halt noch Unsicherheit verschiedener Meßbereiche.
Der HackRF ist ja ein SoftwareDefinedRadio (SDR), also digitale Signalverarbeitung. Gibt es da wirklich Probleme mit 'Reaktionszeiten' ?
Da die ganze Frequenzaufbereitung über Mischen mit einer Quarzfrequenz erfolgt, sollte doch die Abweichung für die verschiedenen Messbereiche gleich sein?
Ich hab mir auch mal so ein Teil bestellt (mit TCXO)
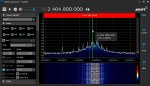
Hier mal das Spektrum eines UKW Senders. Die Frequenzanzeige passt genau.

und das Binden meiner Taranis X9D+ mit einem X6R Empfänger
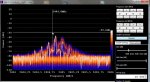
Hallo Reinhard, bei dir würde es eher passen, zumindest liegt der Hauptträger darunter, wenn auch ein bisschen viel. Was genau würdest du mit der Spitze in der Mitte messen?
Ich überlege mir ob ich nicht dieses Gerät noch anschaffe
10MHz Referenz GPS stabilisiert 0.005ppm nach 1min. +1dBm Sinus Ausgang NEU!! | eBay
Ich überlege mir ob ich nicht dieses Gerät noch anschaffe
10MHz Referenz GPS stabilisiert 0.005ppm nach 1min. +1dBm Sinus Ausgang NEU!! | eBay
je genauer die Referenzquelle ist, desto genauer die Frequenzanzeige. 0,1ppm sind schon gut, 0,001 mit einem Rubidium Normal schon besser als hier einer braucht. , die Signallaufzeiten im Hackrf kannst Du vernachlässigen, die machen nicht viel aus. Wie schon richtig bemerkt ist der HackRF ein SDR aber kein Spectrum Analyzer, das macht nur eine Software aus ihm. Mit kommerziellen SA kann der natürlich nicht mithalten, ist aber auch garnicht der Sinn und Zweck.
P.S. mit genau so einem GPSDO arbeite ich auch, , kann ich nur empfehlen...
, die Signallaufzeiten im Hackrf kannst Du vernachlässigen, die machen nicht viel aus. Wie schon richtig bemerkt ist der HackRF ein SDR aber kein Spectrum Analyzer, das macht nur eine Software aus ihm. Mit kommerziellen SA kann der natürlich nicht mithalten, ist aber auch garnicht der Sinn und Zweck. P.S. mit genau so einem GPSDO arbeite ich auch,
, kann ich nur empfehlen...
Was genau würdest du mit der Spitze in der Mitte messen?