
4ESC by Martinez max. 6S
- Themenstarter martinez
- Beginndatum
- Status
- Nicht offen für weitere Antworten.

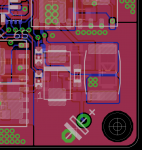
Mein Test-Setup sieht nun so aus. Noch Ports fädeln und Daumendrücken, das alles funktioniert.
Anhang anzeigen 71302
PS: 6S 20A find ich voll ausreichend, das sind bei einem Ochto ja fast 1kW Dauer") ...
...
Noch Dickere Akku´s kann ich mir eh nicht leisten
Anhang anzeigen 71302
PS: 6S 20A find ich voll ausreichend, das sind bei einem Ochto ja fast 1kW Dauer
...Noch Dickere Akku´s kann ich mir eh nicht leisten
20A bei 6S sind meiner Meinung für alles mehr als okay!
4,2V x 6 = 25,2V x 20A = 504W für einen Motor! Bei einen Okto wären das 504W x 8 Motoren = 4032W
Ich habe uns nochmal eine Zusammenfassung für die erste Seite erstellt.
Update 02.10.2013
Das Layout habe ich noch einmal komplett neu aufgebaut.
Nach meinen Vorgaben der Pinbelegung hat mir imcoref eine neue inc File für die SimonK Firmware erstellt. Vielen Dank!!!
Mit der erstellten inc File konnte ich die Atmega 8 nach meinen Vorstellungen "benutzen". Das hat extremen Platz und Durchkontaktierungen gespart.
Als 5V Stromversorgung kommt ein LM2675 zum Einsatz, der Stepdown-Regler hat einen max. Ausgangsstrom von 1A. Dadurch kann man sogar noch den Flight-Controller und den Empfänger mit 5V versorgen. Weiterer Vorteil, es wird so gut wie keine Energie in Wärme umgewandelt. Hier geht´s zu einen Testaufbau mit der V2.0 Link.
Die 5V des Stepdown-Regler können über den 6 poligen Molex Buchse (4 Motorsignal, GND und 5V) direkt den Flightcontroller und den Empfänger versorgen.
Ein 3 pol Molex für I2C ist auch mit dabei.
Die Analog Supply Voltage (Avcc) der Atmegas bekommt ein zentrales RC Glied zur Entstörung der analogen Spannung.
Aref wird per 100nF auf GND geschaltet. (Hier ist ein abschließender Betrag von Jörg Link Vielen Dank!)
Die VCC Pads konnten durch die 4 lagige PCB nach außen wandern, auch die Motorpads sind jetzt alle außen,auf beiden Seiten mit Pads versehen, dadurch kann man z.B. geschlitze Goldkontaktstecker perfekt und sicheranlöten.
Das Layout habe ich seit ca. 3 Tagen fertig, in den letzten 2 Tagen habe ich es optimiert. Man findet echt noch sau viel was man verbessern kann....
Hier nochmal die Daten:
4ESC auf 50x50mm (ohne seitliche Elkos), Lochraster 45x45mm
4 lagige PCB
max 6S VCC
Dauerstrom ca. 20A-25A (mal sehen wie sich die Temperatur entwickelt)
7x Elko THT Pads (VCC)
Zentrale +5V 1A Powersupply (Stepdown)
Molex 6 Pol Buchse (4x ESC, +5V/GND für FC und RC)
Vorbereitung für i2c (3 Pol Molex Buchse mit GND, SDA, SCL)
+5V Status LED
je ESC 2 LEDs für Status und Warnung
2 gegenüberliegende VCC GND Pads auf der Ober- und Unterseite, dadurch könnte man auf 2 4ESC übereinander stecken.
Da das Layout wieder komplett neu ist nenne ich es mal Version 3.0
Bei den nächsten Projekt muss ich mal bei v0.1 Beta anfangen und nicht bei v1.0
So sieht es jetzt aus:
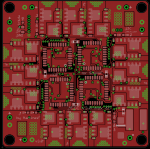
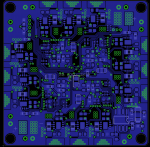
Die 2. Lage ist VCC und die 3. Lage GND.
Wer sich die Eagle Files anschauen möchte (ich wäre dankbar für eine "Endkontrolle") möchte mich bitte kurz anschreiben.
Viele Grüße
Martinez
EDIT:
Ganz vergessen,
meine PCBs für den "normalen" ESC (bis 4S) sind heute gekommen. 10 PCBs (pro PCB 2 ESC)
Das ist der gleiche Schaltplan für der 4ESC v2.0.
Ich behalte für mich erst einmal 4PCBs.
6 Stück könnte ich abgeben (leer ohne Bauteile)
Eine PCB 1 EUR plus Porto
Die MosFET Treiber habe ich auch noch (günstig). Bitte einfach eine PN!Vielleicht hat ja jemand Lust ein bisschen zu löten.....

Anhang anzeigen ESC v1.1.zip
Zuletzt bearbeitet:
ja, sieht extrem sexy aus.
ich würde die Elkos mit speziellen Pads (so wie'n sehr langseitiges Rechteck) richtung Platinenrand ausführen - Top Plus, Bottom Minus oder andersrum und beide mit ein wenig Versatz für viele Vias. dann haben die Elkos a. richtig dicken Kontakt zu GND und VCC und b. mechanischen Halt.
wer dennoch will, kann sie auch klassisch hinstellen.
und in die Layouts will ich natürlich auch reinsehen - muß ich Dir extra ne PM schicken ?
ansonsten muß ich mich notgedrungen etwas raushalten.
Gruß
Lutz
P.S. ich vertick' schonmal die Teile, die noch bei Dir liegen, ja?
ich würde die Elkos mit speziellen Pads (so wie'n sehr langseitiges Rechteck) richtung Platinenrand ausführen - Top Plus, Bottom Minus oder andersrum und beide mit ein wenig Versatz für viele Vias. dann haben die Elkos a. richtig dicken Kontakt zu GND und VCC und b. mechanischen Halt.
wer dennoch will, kann sie auch klassisch hinstellen.
und in die Layouts will ich natürlich auch reinsehen - muß ich Dir extra ne PM schicken ?
ansonsten muß ich mich notgedrungen etwas raushalten.
Gruß
Lutz
P.S. ich vertick' schonmal die Teile, die noch bei Dir liegen, ja?
4,2V x 6 = 25,2V x 20A = 504W für einen Motor! Bei einen Okto wären das 504W x 8 Motoren = 4032W
Ich hab somit übern Daumen geschlagen mit 20V... und vollen Schub fliegt man auch nicht, sondern idr bei 1/3- 1/2 des Maximal Schubes... darum die Aussage Dauer 1kW
Ist aber auch Korinthenkackerei...
Mein 4 Kilo Hexa schwebt bei ca 3A/Motor, dafür reichen die 20A also allemal
Ich finde es auch besser die Beinchen flach auf der PCB anzulöten....
Gibt es dazu Gegenstimmen?
Martinez
Gibt es dazu Gegenstimmen?
Martinez
Schau Dir das einfach beim Herkules ab
Zuletzt bearbeitet:
Ich habe diesen sehr spannenden Thread vor einer Stunde erst entdeckt. Seitdem habe ich hier Seite für Seite durchgelesen.
Ganz große Klasse, was Du hier geleistet hast, Martinez !!
Da Du nach Feedback zum Layout gefragt hast:
In der Zusammenfassung hast Du den LM2756 genannt anstatt dem LM2576. Das hat mich bei der Datenblattsuche eben fast verzweifeln lassen.
Das Layout des Schaltreglers finde ich noch nicht so optimal. Ich denke die Leitung vom Pin8 des LM2576 zur Spule ist ziemlich dünn und lang. Gerade in diesem Bereich sollen Verbindungen möglichst induktivitätsarm sein. In dieser Hinsicht scheint mir, nur ein Durchkontakt zur Spule auch recht knapp bemessen.
Hast Du den Spannungsteiler im Feedback-Pfad eingebaut um bei der Ausgangsspannung flexibel zu sein? Es gibt den Regler ja auch in einer 5V-Festspannungs-Version.
Soweit zu dem was ich den Abbildungen der Zusammenfassung entnehmen konnte.
BTW: Falls nicht unbedingt ein Ampere benötigt wird, gäbe es da noch den LM2842. Der schafft zwar nur 600mA ist aber schön klein im SOT23-Gehäuse. Die Spule könnte dann auch etwas kleiner ausfallen.
Jürgen
Ganz große Klasse, was Du hier geleistet hast, Martinez !!
Da Du nach Feedback zum Layout gefragt hast:
In der Zusammenfassung hast Du den LM2756 genannt anstatt dem LM2576. Das hat mich bei der Datenblattsuche eben fast verzweifeln lassen.
Das Layout des Schaltreglers finde ich noch nicht so optimal. Ich denke die Leitung vom Pin8 des LM2576 zur Spule ist ziemlich dünn und lang. Gerade in diesem Bereich sollen Verbindungen möglichst induktivitätsarm sein. In dieser Hinsicht scheint mir, nur ein Durchkontakt zur Spule auch recht knapp bemessen.
Hast Du den Spannungsteiler im Feedback-Pfad eingebaut um bei der Ausgangsspannung flexibel zu sein? Es gibt den Regler ja auch in einer 5V-Festspannungs-Version.
Soweit zu dem was ich den Abbildungen der Zusammenfassung entnehmen konnte.
BTW: Falls nicht unbedingt ein Ampere benötigt wird, gäbe es da noch den LM2842. Der schafft zwar nur 600mA ist aber schön klein im SOT23-Gehäuse. Die Spule könnte dann auch etwas kleiner ausfallen.
Jürgen
reichen 600mA?
Hi Jürgen,
vielen Dank, ich muss das Danke auf jeden Fall auch an EUCH weiter geben.
Ich meine immer den LM2675 von National Semiconductor der hat 1A Iout.
Danke für das Feedback wegen der Spule, das schau ich mir an.
Der LM2842 ist echt gut, ich bin damals bei der Suche auf min. 1A gegangen.
600mA sind aber auch ordentlich.
Eigentlich sollte das doch auch reichen. Was meint ihr?
Der 4ESC braucht ca. 150mA, ein Empfänger kommt auch auf 50 - 150mA, der Flightcontroller sollte auch nur ca. 50 - 200mA brauchen.
Macht zusammen 500mA.
Die höhere Taktfrequenz des LM2842 sollte auch keine Probleme machen, oder?
Viele Grüße
Martinez
Ich habe diesen sehr spannenden Thread vor einer Stunde erst entdeckt. Seitdem habe ich hier Seite für Seite durchgelesen.
Ganz große Klasse, was Du hier geleistet hast, Martinez !!
Da Du nach Feedback zum Layout gefragt hast:
In der Zusammenfassung hast Du den LM2756 genannt anstatt dem LM2576. Das hat mich bei der Datenblattsuche eben fast verzweifeln lassen.
Das Layout des Schaltreglers finde ich noch nicht so optimal. Ich denke die Leitung vom Pin8 des LM2576 zur Spule ist ziemlich dünn und lang. Gerade in diesem Bereich sollen Verbindungen möglichst induktivitätsarm sein. In dieser Hinsicht scheint mir, nur ein Durchkontakt zur Spule auch recht knapp bemessen.
Hast Du den Spannungsteiler im Feedback-Pfad eingebaut um bei der Ausgangsspannung flexibel zu sein? Es gibt den Regler ja auch in einer 5V-Festspannungs-Version.
Soweit zu dem was ich den Abbildungen der Zusammenfassung entnehmen konnte.
BTW: Falls nicht unbedingt ein Ampere benötigt wird, gäbe es da noch den LM2842. Der schafft zwar nur 600mA ist aber schön klein im SOT23-Gehäuse. Die Spule könnte dann auch etwas kleiner ausfallen.
Jürgen
Ganz große Klasse, was Du hier geleistet hast, Martinez !!
Da Du nach Feedback zum Layout gefragt hast:
In der Zusammenfassung hast Du den LM2756 genannt anstatt dem LM2576. Das hat mich bei der Datenblattsuche eben fast verzweifeln lassen.
Das Layout des Schaltreglers finde ich noch nicht so optimal. Ich denke die Leitung vom Pin8 des LM2576 zur Spule ist ziemlich dünn und lang. Gerade in diesem Bereich sollen Verbindungen möglichst induktivitätsarm sein. In dieser Hinsicht scheint mir, nur ein Durchkontakt zur Spule auch recht knapp bemessen.
Hast Du den Spannungsteiler im Feedback-Pfad eingebaut um bei der Ausgangsspannung flexibel zu sein? Es gibt den Regler ja auch in einer 5V-Festspannungs-Version.
Soweit zu dem was ich den Abbildungen der Zusammenfassung entnehmen konnte.
BTW: Falls nicht unbedingt ein Ampere benötigt wird, gäbe es da noch den LM2842. Der schafft zwar nur 600mA ist aber schön klein im SOT23-Gehäuse. Die Spule könnte dann auch etwas kleiner ausfallen.
Jürgen
Hi Jürgen,
vielen Dank, ich muss das Danke auf jeden Fall auch an EUCH weiter geben.
Ich meine immer den LM2675 von National Semiconductor der hat 1A Iout.
Danke für das Feedback wegen der Spule, das schau ich mir an.
Der LM2842 ist echt gut, ich bin damals bei der Suche auf min. 1A gegangen.
600mA sind aber auch ordentlich.
Eigentlich sollte das doch auch reichen. Was meint ihr?
Der 4ESC braucht ca. 150mA, ein Empfänger kommt auch auf 50 - 150mA, der Flightcontroller sollte auch nur ca. 50 - 200mA brauchen.
Macht zusammen 500mA.
Die höhere Taktfrequenz des LM2842 sollte auch keine Probleme machen, oder?
Viele Grüße
Martinez
Hallo Martinez!
Ich denke auch, dass 600mA ausreichend sind. Ansonsten gibts ja noch meinen fast fertigen "AufsteckBEC"... ;-)
Meiner Meinung nach sollte die Schaltfrequenz kein Problem darstellen (X Version). Aber mit Sicherheit kann man das nur nach Inbetriebnahme und Noise-Messung sagen
Ich denke auch, dass 600mA ausreichend sind. Ansonsten gibts ja noch meinen fast fertigen "AufsteckBEC"... ;-)
Meiner Meinung nach sollte die Schaltfrequenz kein Problem darstellen (X Version). Aber mit Sicherheit kann man das nur nach Inbetriebnahme und Noise-Messung sagen
Zuletzt bearbeitet:
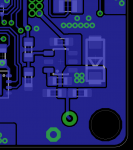
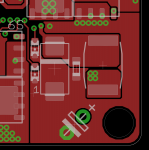
Hier kommt also die neue Version mit dem LM2842.
BOT
TOP
Beide
Die Layout "Regeln" vom Datenblatt habe ich so weit möglich eingehalten.
Die zwei Widerstände nah am FB, die Spule ist "weit" weg.
Der Cin ist direkt am Vin Pin. (Evtl. werde ich hier noch ein 0805 statt 0603 platzieren.)
Die Spule ist sehr nah am SW Pin.
Cout ist an der Kreuzung Spule Diode, eine dicke Kupferfläche.
Ground von der Diode, Cin und Cout an nur einen Punkt an GND zu verbinden fällt mir gerade sehr schwer. Wie wichtig ist das? (doofe Frage...)
Das soll das Rauschen vermindern....
Gruß
Martinez
BOT
TOP
Beide
Die Layout "Regeln" vom Datenblatt habe ich so weit möglich eingehalten.
Die zwei Widerstände nah am FB, die Spule ist "weit" weg.
Der Cin ist direkt am Vin Pin. (Evtl. werde ich hier noch ein 0805 statt 0603 platzieren.)
Die Spule ist sehr nah am SW Pin.
Cout ist an der Kreuzung Spule Diode, eine dicke Kupferfläche.
Ground von der Diode, Cin und Cout an nur einen Punkt an GND zu verbinden fällt mir gerade sehr schwer. Wie wichtig ist das? (doofe Frage...)
Das soll das Rauschen vermindern....
Gruß
Martinez
Hübsch!
Ja, je größer umso besser. Sowohl was die Bauform als auch die Spannung angeht. Beim angestrebten Spannungsbereich ict ja sowieso ein 50V-Typ erforderlich.
Kann ich im Moment auch nicht nachhaltig beantworten. Ich habe jedoch gelernt,daß das Schaltreglerdesign nicht so ganz einfach ist. Die Designregeln der Datenblätter sind da im allgemeinen wirklich nützlich.
Ich denke, wenn Du dem Cin und vor allem Cout noch ein paar Dukos zum zentralen Gnd-Layer spendierst, haut das schon gut hin.
Jürgen
Der Cin ist direkt am Vin Pin. (Evtl. werde ich hier noch ein 0805 statt 0603 platzieren.)
Ground von der Diode, Cin und Cout an nur einen Punkt an GND zu verbinden fällt mir gerade sehr schwer. Wie wichtig ist das?
Ich denke, wenn Du dem Cin und vor allem Cout noch ein paar Dukos zum zentralen Gnd-Layer spendierst, haut das schon gut hin.
Jürgen
Bei meinen "Forschungen" zum Schaltregler bin ich auf eine Seite gestossen, wo folgendes stand:
Auf jeden Fall sollte auch beachtet werden:
1. keine Leitung und auch keine Massefläche unter der Spule. Denn sonst koppelt das Magnetfeld der Spule in die Leiterbahn oder die Masse ein und induziert dort Störströme.
Ich weiss nicht, in wie weit das stimmt. Konnte es auch noch nicht ausprobieren, weil ich zur Zeit keine habe, mal "schnell" ne Platine zu belichten und zu ätzen.
Aber vielleicht wissen jreise, heidi02 oder tommy mehr....
Sven
Auf jeden Fall sollte auch beachtet werden:
1. keine Leitung und auch keine Massefläche unter der Spule. Denn sonst koppelt das Magnetfeld der Spule in die Leiterbahn oder die Masse ein und induziert dort Störströme.
Ich weiss nicht, in wie weit das stimmt. Konnte es auch noch nicht ausprobieren, weil ich zur Zeit keine habe, mal "schnell" ne Platine zu belichten und zu ätzen.
Aber vielleicht wissen jreise, heidi02 oder tommy mehr....
Sven
Ich habe mir gerade nochmal das Datenblatt des Mosfet Treibers MCP14700 angeschaut, dabei ist mir aufgefallen das dort nie ein Widerstand zwischen High / LowDR und den Gate des Mosfets ist.
Im Moment habe ich im Stromlaufplan noch ein 100R Widerstand drin.
Das sind 24 Bauteile die bestück werden müssen ob 100R oder eben 0R.
Ich würde ihn eigentlich lieber weglassen....
Gruß
Martinez
Im Moment habe ich im Stromlaufplan noch ein 100R Widerstand drin.
Das sind 24 Bauteile die bestück werden müssen
ob 100R oder eben 0R.Ich würde ihn eigentlich lieber weglassen....
Gruß
Martinez
- Status
- Nicht offen für weitere Antworten.

