
Wenn "align_mag" richtig eingestellt ist, darf der Kompass um +-20° "schief" eingebaut sein - und iNAV funktioniert trotzdem. Auch ein Fehler von 20° in der MAG_Declination wirkt sich noch nicht stark aus. Es muss bei Dir also etwas falsch eingestellt oder kaputt sein. Es gab eine inoffizielle iNAV 1.2.1 Version, die diese Kreise im POSHOLD auch bei korrekt eingestelltem Kopter erzeugte. Die aktuelle, offizielle Version 1.2.1 hat diesen Fehler behoben.
EDIT:
Hast Du vielleicht durch ein CLI-Backup Deine MAG-Kalibrierung verloren/verfälscht?
Edit2:
Richte den Kopter nach Norden aus. Im Configurator muss die Kompass-Rose auf der "Setup"-Seite nach Norden zeigen. Dreh den Kopter nach Osten: Der Kompass muss nach Osten weisen. Kippe den Kopter in Roll und/oder Pitch-Richtung um 20°: Der Kompass darf nicht wandern.
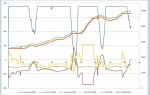
Du kannst die korrekte Funktion auch im Reiter "Sensors" prüfen.
EDIT:
Hast Du vielleicht durch ein CLI-Backup Deine MAG-Kalibrierung verloren/verfälscht?
Edit2:
Richte den Kopter nach Norden aus. Im Configurator muss die Kompass-Rose auf der "Setup"-Seite nach Norden zeigen. Dreh den Kopter nach Osten: Der Kompass muss nach Osten weisen. Kippe den Kopter in Roll und/oder Pitch-Richtung um 20°: Der Kompass darf nicht wandern.
Du kannst die korrekte Funktion auch im Reiter "Sensors" prüfen.
Zuletzt bearbeitet:

")

