
APM 2.5 mit Firmware 2.9.1
- Themenstarter matala
- Beginndatum
Hab grad bei den Jungs von DIY noch ein paar Hinweise gesehen, die ganz interessant klingen.
Der ACRO-Mode beim APM dürfte ja kein reiner RATE-Loop sein, sondern noch immer die STAB-Werte miteinbeziehen.
Fakt ist, daß der STAB-Teil freilich auch das Verhalten des Copters beeinflußt, was zwar die meisten von uns letzten Endes wollen, nur verfälscht dieser die Interpretation der RATE-P/I/D Werte, die wir anpassen wollen.
Nun, da wird erwähnt - was ich bis jetzt allerdings selbst noch nicht versucht habe - daß man durch Reduktion von ACRO_BAL_PITCH und ACRO_BAL_ROLL (zu finden in Advanced Params) von dem Standard-Wert 200 auf z.B. 50 den Einfluss des STAB-Loops im ACRO-Mode auf ein vernünftiges Mindestmaß reduzieren kann.
Mit AXIS_ENABLE=0 scheints als könne man den ACRO-Mode komplett den Einfluß vom STAB-Loop abgewöhnen.
Die Idee ist, den Copter temporär entweder gänzlich in den ACRO-Mode zu versetzen (gute Nerven und viel Erfahrung des Piloten vorausgesetzt) oder zumindest den STAB-Loop Einfluß zu reduzieren und dann mit dem PID-Tuning zu beginnen.
Mal sehen, ob bis zum Wochenende der Regen und der Wind in Wien wieder abklingt um das mal zu testen...
Der ACRO-Mode beim APM dürfte ja kein reiner RATE-Loop sein, sondern noch immer die STAB-Werte miteinbeziehen.
Fakt ist, daß der STAB-Teil freilich auch das Verhalten des Copters beeinflußt, was zwar die meisten von uns letzten Endes wollen, nur verfälscht dieser die Interpretation der RATE-P/I/D Werte, die wir anpassen wollen.
Nun, da wird erwähnt - was ich bis jetzt allerdings selbst noch nicht versucht habe - daß man durch Reduktion von ACRO_BAL_PITCH und ACRO_BAL_ROLL (zu finden in Advanced Params) von dem Standard-Wert 200 auf z.B. 50 den Einfluss des STAB-Loops im ACRO-Mode auf ein vernünftiges Mindestmaß reduzieren kann.
Mit AXIS_ENABLE=0 scheints als könne man den ACRO-Mode komplett den Einfluß vom STAB-Loop abgewöhnen.
Die Idee ist, den Copter temporär entweder gänzlich in den ACRO-Mode zu versetzen (gute Nerven und viel Erfahrung des Piloten vorausgesetzt) oder zumindest den STAB-Loop Einfluß zu reduzieren und dann mit dem PID-Tuning zu beginnen.
Mal sehen, ob bis zum Wochenende der Regen und der Wind in Wien wieder abklingt um das mal zu testen...


hallo christian
nicht ganz archaeos hatte diesen tip gegeben es hat dieses pumpen fast eliminiert und
der copter fliegt jetzt auch mit den 12" props im rtl und alt hold schön ruhig
habe mir jetzt erstmalig das telemetrie set vorgenommen und werde demnächst weiter experimentieren
dank deiner studienarbeit
glück auf
matala
nicht ganz archaeos hatte diesen tip gegeben es hat dieses pumpen fast eliminiert und
der copter fliegt jetzt auch mit den 12" props im rtl und alt hold schön ruhig
habe mir jetzt erstmalig das telemetrie set vorgenommen und werde demnächst weiter experimentieren
dank deiner studienarbeit
glück auf
matala
ist alles ein wenig esoterisch...
hab schon öfter wo gelesen, daß man throttle accel P etwa halb so groß wie throttle accel I halten soll.
In deinem Fall weichst Du davon ab und erreichst gerade damit gute Ergebnisse.
Schade, daß das alles sowas von gar nicht dokumentiert ist.
Aber egal, gemeinsam finden wir das alle schon raus")
hab schon öfter wo gelesen, daß man throttle accel P etwa halb so groß wie throttle accel I halten soll.
In deinem Fall weichst Du davon ab und erreichst gerade damit gute Ergebnisse.
Schade, daß das alles sowas von gar nicht dokumentiert ist.
Aber egal, gemeinsam finden wir das alle schon raus
Hallo,
weil mir unter anderem geraten wurde statt normaler Propeller E-Propeller zu verwenden habe ich festgestellt, dass die E-Props bei gleicher Drehzahl zu wenig Schub liefern und ich somit den Quad kaum noch hoch bekomme. Beide Typen sind GF verstärkt 11" x 4,7 bzw. 11" x 5 bei den E-Props. Beide Typen sind von Paul Bake. Welcher Vorteil soll eigentlich bei den E-Props sein?
Gruß claus45
weil mir unter anderem geraten wurde statt normaler Propeller E-Propeller zu verwenden habe ich festgestellt, dass die E-Props bei gleicher Drehzahl zu wenig Schub liefern und ich somit den Quad kaum noch hoch bekomme. Beide Typen sind GF verstärkt 11" x 4,7 bzw. 11" x 5 bei den E-Props. Beide Typen sind von Paul Bake. Welcher Vorteil soll eigentlich bei den E-Props sein?
Gruß claus45

Also mit ATL Hold bin ich noch nicht richtig weiter. Habe mir das APM2.5 Gehäuse bestellt was aber nichts verändert hat.
Th_Accel habe ich mal von 0,2 bis 0,9 getestet. 0,2 ist anscheinend am besten.
Höhe Halten bringt auch noch nicht das was ich erwarte. Copter pumt immer noch ca. 5m hoch und runter nur halt etwas langsamer.
Loiter und RTL klappen aber bis auf pumpen recht gut.
Morgen geht das testen weiter.
Hat zufällig jemand den
http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=786&productname=
mit APM2.5 am laufen?
Th_Accel habe ich mal von 0,2 bis 0,9 getestet. 0,2 ist anscheinend am besten.
Höhe Halten bringt auch noch nicht das was ich erwarte. Copter pumt immer noch ca. 5m hoch und runter nur halt etwas langsamer.
Loiter und RTL klappen aber bis auf pumpen recht gut.
Morgen geht das testen weiter.
Hat zufällig jemand den
http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=786&productname=
mit APM2.5 am laufen?
Das ist einer von den DJI Flamewheel clones.
Die sind leider viel zu weich und zu vibrationsempfindlich.
Wenn du Th_Accel so stark reduzieren musst, dann hast du sicherlich sehr starke Vibrationen.
--> Du musst deinen APM sehr gut entkoppeln.
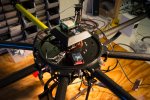
Ich habe mir hiervon 2 Stück gekauft:
http://blaui-rc.de/product_info.php?products_id=2
In der mitte durchgeschnitten damit ich 4 kleine Würfel habe. Aus Leiterkartenmaterial habe ich mir 2 Platten ausgeschnitten und mit den Würfeln verbunden. Oben drauf dann den APM und mit Abstandshaltern das GPS mit Shield und Kompass.
Wichtig ist, dass du ein gewisses Gewicht als Schwindungsdämpfende Masse an der entkoppelten Seite bekommst. Falls du kein GPS Shield hast (meins ist recht schwer) könntest du auch ein Stück Holz oder so zusätzlich nehmen. (Bloss keinen Stahl oder so)
Hier 2 Fotos:

Die sind leider viel zu weich und zu vibrationsempfindlich.
Wenn du Th_Accel so stark reduzieren musst, dann hast du sicherlich sehr starke Vibrationen.
--> Du musst deinen APM sehr gut entkoppeln.
Ich habe mir hiervon 2 Stück gekauft:
http://blaui-rc.de/product_info.php?products_id=2
In der mitte durchgeschnitten damit ich 4 kleine Würfel habe. Aus Leiterkartenmaterial habe ich mir 2 Platten ausgeschnitten und mit den Würfeln verbunden. Oben drauf dann den APM und mit Abstandshaltern das GPS mit Shield und Kompass.
Wichtig ist, dass du ein gewisses Gewicht als Schwindungsdämpfende Masse an der entkoppelten Seite bekommst. Falls du kein GPS Shield hast (meins ist recht schwer) könntest du auch ein Stück Holz oder so zusätzlich nehmen. (Bloss keinen Stahl oder so)
Hier 2 Fotos:
Also mit ATL Hold bin ich noch nicht richtig weiter. Habe mir das APM2.5 Gehäuse bestellt was aber nichts verändert hat.
Th_Accel habe ich mal von 0,2 bis 0,9 getestet. 0,2 ist anscheinend am besten.
Höhe Halten bringt auch noch nicht das was ich erwarte. Copter pumt immer noch ca. 5m hoch und runter nur halt etwas langsamer.
Loiter und RTL klappen aber bis auf pumpen recht gut.
Morgen geht das testen weiter.
Hat zufällig jemand den
http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=786&productname=
mit APM2.5 am laufen?
Th_Accel habe ich mal von 0,2 bis 0,9 getestet. 0,2 ist anscheinend am besten.
Höhe Halten bringt auch noch nicht das was ich erwarte. Copter pumt immer noch ca. 5m hoch und runter nur halt etwas langsamer.
Loiter und RTL klappen aber bis auf pumpen recht gut.
Morgen geht das testen weiter.
Hat zufällig jemand den
http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=786&productname=
mit APM2.5 am laufen?
zu schrotten.
Mittlerweile liegt der clone zerlegt in der Ecke und der Apm ist auf den Hexa implementiert und das Ergebnis ist um ein
Mehrfaches besser.
So wie Yups es sagt die Vibs sind zu hoch für die Apm.
Gruß
Jörg
Ist schon klar das es kein Bentley Rahmen ist soll ja auch nur zum FPV Test/Anfang sein.
Vibrationen? Beim normalen Fliegen oder Loiter würde ich es ja glauben, aber das ist recht ruhig und sehr stabil.
Hat ATL Hold etwas mit Vibrationen zu tun? Ist dort nicht nur der Baro zuständig?
Lass mich aber gern belehren.
Habe das APM schon mit Schaumstoff gedämpft montiert.
soll ja auch nur zum FPV Test/Anfang sein.Vibrationen? Beim normalen Fliegen oder Loiter würde ich es ja glauben, aber das ist recht ruhig und sehr stabil.
Hat ATL Hold etwas mit Vibrationen zu tun? Ist dort nicht nur der Baro zuständig?
Lass mich aber gern belehren.
Habe das APM schon mit Schaumstoff gedämpft montiert.
Zuletzt bearbeitet:
AltHold ist Beschleunigungskompensiert. Der ACC übernimmt mittels Sensorfusion zusammen mit dem Baro die Höhenregelung. Das ganze ist leider sehr vibrationsempfindlich.
Siehe auch hier:
http://diydrones.com/forum/topics/arducopter-2-9-released
Siehe auch hier:
http://diydrones.com/forum/topics/arducopter-2-9-released
Da wir hier mal ein wenig über PID-Tuning geplaudert haben;
Hab grad ein Video von einem der AC-Entwickler gefunden, das ein paar hilfreiche Tipps enthält:
http://www.youtube.com/watch?v=NOQPrTdrQJM
Das Video bezieht sich zwar auf die 3.0er, die bald released wird, macht aber keinen wirklichen Unterschied...
Gruß,
Christian
Hab grad ein Video von einem der AC-Entwickler gefunden, das ein paar hilfreiche Tipps enthält:
http://www.youtube.com/watch?v=NOQPrTdrQJM
Das Video bezieht sich zwar auf die 3.0er, die bald released wird, macht aber keinen wirklichen Unterschied...
Gruß,
Christian
hallo christian
habe heute einmal überprüft ob bei mir folgende zeile richtig ist
Zuerst mal sollte man sicherstellen, daß INS_MPU6K_FILTER=20 ist
war natürlich auf 0
jetzt mit 20 fliegt der octocopter perfekt
auch bei meinem f450 überprüft und siehe da auch auf 0 und dann auf 20 eingestellt und dieser fliegt perfekt
hatte ja dieses pumpen der motoren beim okto zu beklagen nun alles auf default und
das teil steht wie die 1
ich behalte meine beiden apm`s auf jeden fall
glück auf
matala
habe heute einmal überprüft ob bei mir folgende zeile richtig ist
Zuerst mal sollte man sicherstellen, daß INS_MPU6K_FILTER=20 ist
war natürlich auf 0
jetzt mit 20 fliegt der octocopter perfekt
auch bei meinem f450 überprüft und siehe da auch auf 0 und dann auf 20 eingestellt und dieser fliegt perfekt
hatte ja dieses pumpen der motoren beim okto zu beklagen nun alles auf default und
das teil steht wie die 1
ich behalte meine beiden apm`s auf jeden fall
glück auf
matala
Hallo Allerseits,
hab da mal eine Frage. Ich benutze am APM 2.5 das 3DR Powermodul zur Strom/Spannungsmessung.
Wenn ich unter "Battery Monitor" alles eingestellt habe zeigt mir der MP immer ~0,5V weniger an.
Leider lässt sich kein Wert anpassen.

Gibt es einen Parameter zur Anpassung der gemessenen Spannung?
Aktuelle FW. 2.9.1b
APM wird an der Outputleiste versorgt, Jumper ist gezogen und die 5V Leitungen vom Powermodul sind abgeklemmt. (wegen dieser Probleme)
hab da mal eine Frage. Ich benutze am APM 2.5 das 3DR Powermodul zur Strom/Spannungsmessung.
Wenn ich unter "Battery Monitor" alles eingestellt habe zeigt mir der MP immer ~0,5V weniger an.
Leider lässt sich kein Wert anpassen.
Gibt es einen Parameter zur Anpassung der gemessenen Spannung?
Aktuelle FW. 2.9.1b
APM wird an der Outputleiste versorgt, Jumper ist gezogen und die 5V Leitungen vom Powermodul sind abgeklemmt. (wegen dieser Probleme)

