
AUAV-X2 - Ein echter, kompat. Mini PIXHAWK aus Bulgarien!
- Themenstarter gervais
- Beginndatum
![IMG_20150614_214712[1].jpg](/data/attachments/90/90539-70e20d2efc3d6dda32d86acad30130cc.jpg)
Die IMU Meldungen habe ich je nach Flug auch. Beim Sanft schweben habe ich immer zwischen 50 und 75. Wenn ich dann mal gas gebe geht es je nach dauer und Manöver auch mal an die 150. Die HQ Prop lassen sich nicht so doll wuchten, und mein Rahmen mit Cam und Gimbal sollte besser mit 12mm Rohren stat den 10mm Rohren geflogen werden.
Thrust = FAIL??
Thrust = FAIL??
Zu schnell? Fliegen lernen.....
Ansonsten sind die werte ok. Du kannst aber rc feel weiter absenken.
Unabhängig davon kannst du ruhig erwähnen, dass du die instabile beta nimmst.
Was ist an den werten ungewöhnlich?
Ansonsten sind die werte ok. Du kannst aber rc feel weiter absenken.
Unabhängig davon kannst du ruhig erwähnen, dass du die instabile beta nimmst.
Was ist an den werten ungewöhnlich?
Das war kein angriff. Sorry .
Aber du bist nicht der erste mit der Aussage. Wie kommst du darauf, dass die pids komisch sein. Woran merkst du es? Generell Probleme, stress im wind?
Und die beta ist mindestens im autotune sehr lustig.....hab da spezielle erfahrung gemacht.
Prinzipiell sollten alle durch autotune ermittelbaren *rate* werte so hoch wie möglich sein.
Wenn es fliegerisch scheitert, ist rc_feel dein Freund. Wobei der ja schon auf lockeren 50 steht.
Aber du bist nicht der erste mit der Aussage. Wie kommst du darauf, dass die pids komisch sein. Woran merkst du es? Generell Probleme, stress im wind?
Und die beta ist mindestens im autotune sehr lustig.....hab da spezielle erfahrung gemacht.
Prinzipiell sollten alle durch autotune ermittelbaren *rate* werte so hoch wie möglich sein.
Wenn es fliegerisch scheitert, ist rc_feel dein Freund. Wobei der ja schon auf lockeren 50 steht.
Das war lediglich ne Info für weitere Interessenten. Was habt ihr für ein Problem?
Will mich hier nicht streiten und den Thread weiter zu müllen. Insgesamt sind wir jetzt schon bei 6 Beiträgen die die Welt nicht braucht ") Ich bin mir jedoch nicht sicher, ob die Info über den aktuellen Preis nicht doch den ein oder anderen interessiert. Dass der aktuelle Preis hier schon irgendwo steht, habe ich leider nicht gesehen!
Ich bin mir jedoch nicht sicher, ob die Info über den aktuellen Preis nicht doch den ein oder anderen interessiert. Dass der aktuelle Preis hier schon irgendwo steht, habe ich leider nicht gesehen!
Ich bin mir jedoch nicht sicher, ob die Info über den aktuellen Preis nicht doch den ein oder anderen interessiert. Dass der aktuelle Preis hier schon irgendwo steht, habe ich leider nicht gesehen! FYI, der Preis ist nicht gestiegen. Der Dollar ist heute aber mehr wert als 2014;-) 130$ waren für die FC damals um 101€ . Das ich Paypalkosten nicht mit einbeziehe, ist ebenso klar.
@Robschii, setz die halt auf Schaumstoff- oder Gelwürfel. Das verringert die Vib Pegel und verhindert ggfls. plötzliche Höhenflüge.
@Robschii, setz die halt auf Schaumstoff- oder Gelwürfel. Das verringert die Vib Pegel und verhindert ggfls. plötzliche Höhenflüge.
Zuletzt bearbeitet:


Das war kein angriff. Sorry .
Aber du bist nicht der erste mit der Aussage. Wie kommst du darauf, dass die pids komisch sein. Woran merkst du es? Generell Probleme, stress im wind?
Und die beta ist mindestens im autotune sehr lustig.....hab da spezielle erfahrung gemacht.
Prinzipiell sollten alle durch autotune ermittelbaren *rate* werte so hoch wie möglich sein.
Wenn es fliegerisch scheitert, ist rc_feel dein Freund. Wobei der ja schon auf lockeren 50 steht.
Aber du bist nicht der erste mit der Aussage. Wie kommst du darauf, dass die pids komisch sein. Woran merkst du es? Generell Probleme, stress im wind?
Und die beta ist mindestens im autotune sehr lustig.....hab da spezielle erfahrung gemacht.
Prinzipiell sollten alle durch autotune ermittelbaren *rate* werte so hoch wie möglich sein.
Wenn es fliegerisch scheitert, ist rc_feel dein Freund. Wobei der ja schon auf lockeren 50 steht.
Video vom Freitag
[video=youtube;D6DEcmSEA98]https://www.youtube.com/watch?v=D6DEcmSEA98[/video]
und
[video]https://youtu.be/oBxrY0ujIGo[/video]
Zuletzt bearbeitet:
Ich habe heute mein GPS Modul inkl. Mag angeschlossen, aber unter "Status" wird mx my mz angezeigt, aber mx2 my2 mz3 stehen jeweils auf 0 0 0, hat da etwas mit dem externen Mag nicht geklappt? An meiner APM lief alles noch wunderbar
(Nur SDA und SCL angeschlosse da GPS&Mag Kombi, lief an der APM auch so)
(Nur SDA und SCL angeschlosse da GPS&Mag Kombi, lief an der APM auch so)
Hi guys,
It seems most of the delayed packages are sitting in the Deutschepost Frankfurt Logistics.
It seems most of the delayed packages are sitting in the Deutschepost Frankfurt Logistics.
Die Anfrage bei der "Deutschen Post" (nicht DHL!) über den Sendungsstatus blieb bislang unbeantwortet.
Ich habe am AUAV-X2 die 3DR Telemetrie wie im Bild angeschlossen , das funktioniert soweit auch. Ein MinimOSD soll dann noch zusätzlich dran ( ist am Kabel schon vorgesehen).

Mein Empfänger hat auch die Möglichkeit Telenmetrie an meine FS zu senden ( MAVlink Protokoll) . Dazu möchte ich aber diesen Anschluss nutzen, da mit schlicht der Platz im Kopter fehlt.
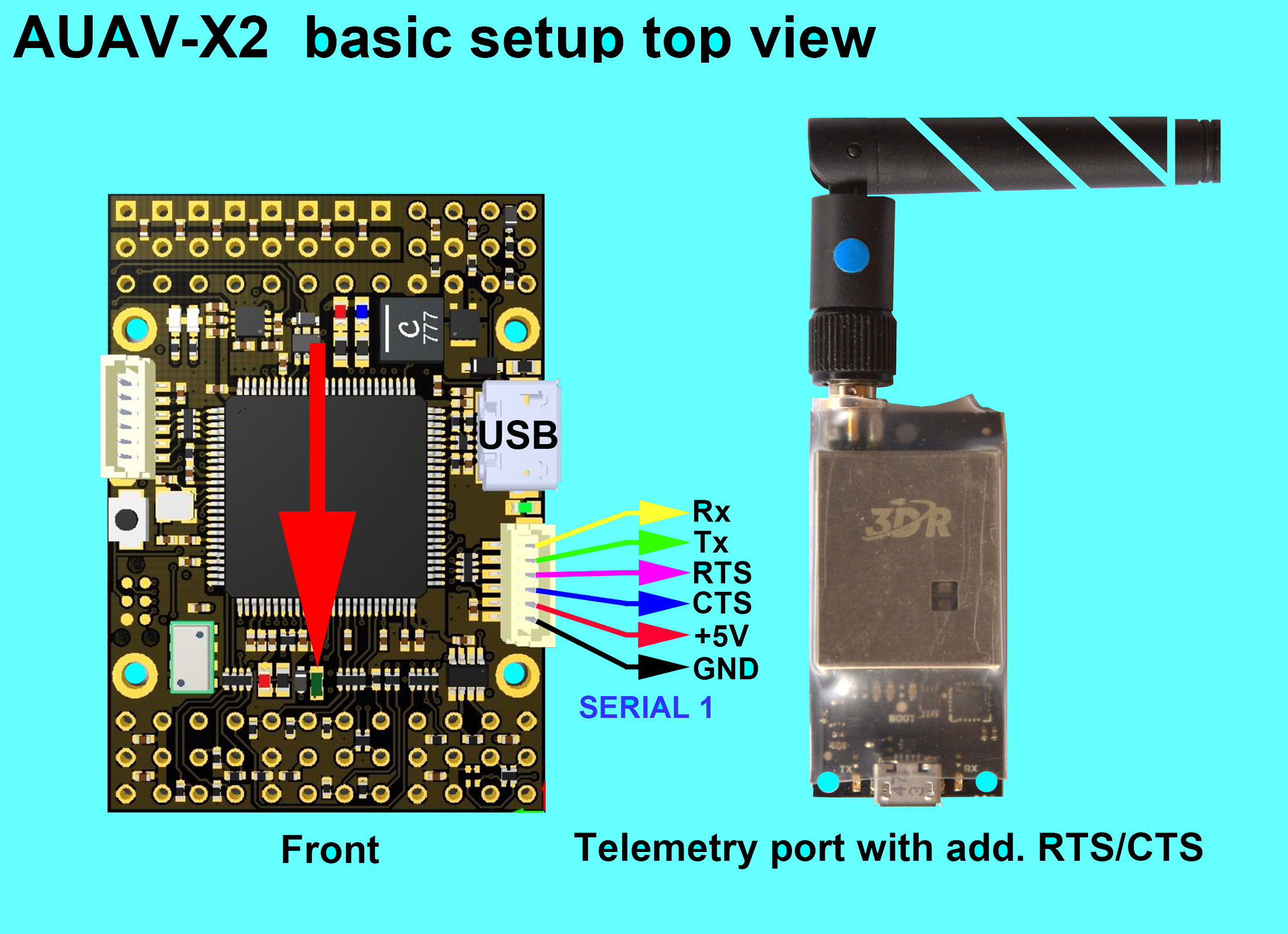
Wird das gleichzeitig gehen und wenn ja, muß dafür auch TX und RX am Emfänger getauscht werden ?
Mein Empfänger hat auch die Möglichkeit Telenmetrie an meine FS zu senden ( MAVlink Protokoll) . Dazu möchte ich aber diesen Anschluss nutzen, da mit schlicht der Platz im Kopter fehlt.
Wird das gleichzeitig gehen und wenn ja, muß dafür auch TX und RX am Emfänger getauscht werden ?

