
Baubericht SIX Medium Hexa von quadframe
- Themenstarter schneipe
- Beginndatum
naja, mein gps sitz recht nahe am lipo (http://fpv-community.de/showthread....-andere-Copter&p=245917&viewfull=1#post245917) und bekommt daher scheinbar ein paar störungen rein was zum tbe (kreisen bei psh) führt.
klar, ich könnte das gps einfach höher setzen aber so ist es bei einem eventuellen crash recht gut geschützt. daher die überlegung mit der platte zur abschirmung...
viele grüße, gerald.
klar, ich könnte das gps einfach höher setzen aber so ist es bei einem eventuellen crash recht gut geschützt. daher die überlegung mit der platte zur abschirmung...
viele grüße, gerald.


So, hallo zusammen,
ich habe heute morgen endlich meinen Erstflug hinter mich gebracht - und bin RESTLOS BEGEISTERT! Ohne eine Einstellung an der Naza zu ändern (Gains mal geschätzt auf 130), steht er sofort wie eine Eins in der Luft, wobbelt nicht, vibriert nicht, fliegt extrem ruhig und vorhersagbar - hatte gar nicht zu hoffen gewagt, dass das Ergebnis auf Anhieb SO genial sein würde! Kein Gedanke mehr an den F550 ... Auch die Themen Motorleistung (reichlich) und Flugzeit (vorläufig 8min bei kalten 3S 5000mAh) sind voll zufriedenstellend. Jetzt wird noch mit der Kameraposition gespielt und dann habe ich den (für mich) perfekten Copter!
Ach, was red' ich lange, hier der Beweis ... Video mit GoPro2 mit 1080p und 25fps, also eher schwierige Bedingungen, nicht stabilisiert. Das andere ist vom iPhone, das Zittern bin ich, nicht der Copter")
Frohes Fest!!!
https://www.youtube.com/watch?v=Sg_yBVbyvOc
https://www.youtube.com/watch?v=yXiyPDMKTBQ
EDIT: Akkus sind wieder voll, 3600 bzw. 3700 mAh gingen rein, auch da ist auch noch Luft nach oben ... die Flugzeit ist damit genauso lang wie bei meinem F550, aber mit 4S ... Hammer!!!
ich habe heute morgen endlich meinen Erstflug hinter mich gebracht - und bin RESTLOS BEGEISTERT! Ohne eine Einstellung an der Naza zu ändern (Gains mal geschätzt auf 130), steht er sofort wie eine Eins in der Luft, wobbelt nicht, vibriert nicht, fliegt extrem ruhig und vorhersagbar - hatte gar nicht zu hoffen gewagt, dass das Ergebnis auf Anhieb SO genial sein würde! Kein Gedanke mehr an den F550 ... Auch die Themen Motorleistung (reichlich) und Flugzeit (vorläufig 8min bei kalten 3S 5000mAh) sind voll zufriedenstellend. Jetzt wird noch mit der Kameraposition gespielt und dann habe ich den (für mich) perfekten Copter!
Ach, was red' ich lange, hier der Beweis ... Video mit GoPro2 mit 1080p und 25fps, also eher schwierige Bedingungen, nicht stabilisiert. Das andere ist vom iPhone, das Zittern bin ich, nicht der Copter
Frohes Fest!!!
https://www.youtube.com/watch?v=Sg_yBVbyvOc
https://www.youtube.com/watch?v=yXiyPDMKTBQ
EDIT: Akkus sind wieder voll, 3600 bzw. 3700 mAh gingen rein, auch da ist auch noch Luft nach oben ... die Flugzeit ist damit genauso lang wie bei meinem F550, aber mit 4S ... Hammer!!!
Zuletzt bearbeitet:
Ja, ich hatte gleich 2 Ersatzmotoren mit bestellt, damit ich nicht in einem halben Jahr auf die Suche gehen muss. Die Qualität ist aber viel besser als gedacht, die Langzeiterfahrungen warten wir mal ab ....
Die GPS-Position habe ich leider nicht mehr im Kopf und die Daten sind auch auf einem anderen Rechner, aber ich habe die Zahlen möglichst exakt eingegeben und komme auf sowas wie -4; 6; -12 cm oder so. Kann ich aber nochmal genauer nachsehen, wenn das von Interesse ist (aber erst am 30.12.). Auf jeden Fall scheint es auch kein Problem mit Kreiseln (toilet bowl) zu geben, das wohl eher auftritt, wenn die GPS-Maus nicht mittig montiert ist. Fast überflüssig zu sagen, aber auch das Problem hatte ich beim F550 trotz richtig eingestellter Parameter und bin es nur über ein anders verlegtes GPS-Kabel wieder los geworden ...
Die GPS-Position habe ich leider nicht mehr im Kopf und die Daten sind auch auf einem anderen Rechner, aber ich habe die Zahlen möglichst exakt eingegeben und komme auf sowas wie -4; 6; -12 cm oder so. Kann ich aber nochmal genauer nachsehen, wenn das von Interesse ist (aber erst am 30.12.). Auf jeden Fall scheint es auch kein Problem mit Kreiseln (toilet bowl) zu geben, das wohl eher auftritt, wenn die GPS-Maus nicht mittig montiert ist. Fast überflüssig zu sagen, aber auch das Problem hatte ich beim F550 trotz richtig eingestellter Parameter und bin es nur über ein anders verlegtes GPS-Kabel wieder los geworden ...
Dann Berichte ich mal von meinem Erstflug . Aufgeregt ging es zu unseren Messe Parkplätzen dort angekommen machte ich mich gleich ans anschließen des lipos. Nach ca20 Sekunden standen ausreichend Satelliten zur Verfügung und es wurde der erste Abhebe Versuch gemacht ..... Und was soll ich sagen , es hat sich nichts getan . Also Lipo wieder ab und Fehlversuche . Gesagt getan und siehe da : Propeller falsch herum , bohrte sich in den Boden 😄 Anfängerfehler Nr 1. nächster Versuch : diesmal sah alles gut aus bis zu dem Moment als er abheben wollte , da legte er sich direkt auf die Seite ( reproduzierbar 😳) , wieder alles ab und nochmals Fehlversuche . Ich wollte schon alles abbrechen da ja heute Heiligabend ist doch als ich gerade im Auto einsteigen wollte viel mir der Fehler wie Schuppen vor den Augen ein . Die Motoren habe ich von 1-6 im Uhrzeigersinn i. Das naza gesteckt jedoch sind sie im naza entgegengesetzt zu montieren . Motoren umgesteckt nächster Versuch und was soll ich sagen DAS DING FLIEGT WIE EINE 1 . Somit habe ich meinen ersten Hexacopter in die Luft gebracht . Ich möchte mich hiermit bei allen bedanken die mir mit Rat zur Seite gestanden haben und ganz besonders bei @schneipe der mich durch seinen Baubericht erst zum eigenen Bau inspiriert hat . Ein Super Lob an das Forum hier . Ich wünsche Euch allen ein paar wundervolle Weihnachtstage . Gruß Michael
Hi, ich wollte noch meine Parameter nachliefern; die GPS Position ist X= -11cm, Y= 6cm, Z= -12cm.
Die Gains sind 130, 130, 120, 140; 100, 100. Damit werde ich jetzt erst mal weiterfliegen, die ersten beiden hatte ich beim ersten Flug auf X1 gelegt und hatte nach dem Fliegen dann doch wieder 130 eingestellt ...
Viele Grüße
Zlui
Die Gains sind 130, 130, 120, 140; 100, 100. Damit werde ich jetzt erst mal weiterfliegen, die ersten beiden hatte ich beim ersten Flug auf X1 gelegt und hatte nach dem Fliegen dann doch wieder 130 eingestellt ...
Viele Grüße
Zlui
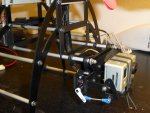
Soo, ich nochmal. Vielleicht kann der eine oder andere etwas mit meiner Überarbeitung des Quadframe Gimbal anfangen, siehe die angehängten Bilder.
Zum einen habe ich mit zwei weiteren Vierkantrahmen und vier Rohren ein zweites "Stockwerk" eingezogen und die Kamera tiefer und nach vorne gesetzt. Damit habe ich bei waagerechtem Blick nach vorne und Gopro 1080p mit mittlerem Weitwinkel die Motorgondeln nur noch bei mittlerem bis schnellem Vorwärtsflug im Bild, sobald ich etwas nach unten neige, sind sie weg.
Zum zweiten habe ich die Aufhängungspunkte der Kameraplattform geändert. Das hat zur Folge, dass ich sie jetzt bis ca. 80 Grad nach unten schwenken kann, weil sie nicht mehr hinten anstößt. Nachteil der Konstruktion ist, dass man beim Nick-Ausgleich jetzt ein etwas stärkeres Zittern sieht, weil sich durch die geänderte Geometrie faktisch die erreichbare Auflösung reduziert. Ist eine Frage, was man höher priorisiert ...
Schöne Grüße, guten Flug & guten Rutsch
Zlui
Zum einen habe ich mit zwei weiteren Vierkantrahmen und vier Rohren ein zweites "Stockwerk" eingezogen und die Kamera tiefer und nach vorne gesetzt. Damit habe ich bei waagerechtem Blick nach vorne und Gopro 1080p mit mittlerem Weitwinkel die Motorgondeln nur noch bei mittlerem bis schnellem Vorwärtsflug im Bild, sobald ich etwas nach unten neige, sind sie weg.
Zum zweiten habe ich die Aufhängungspunkte der Kameraplattform geändert. Das hat zur Folge, dass ich sie jetzt bis ca. 80 Grad nach unten schwenken kann, weil sie nicht mehr hinten anstößt. Nachteil der Konstruktion ist, dass man beim Nick-Ausgleich jetzt ein etwas stärkeres Zittern sieht, weil sich durch die geänderte Geometrie faktisch die erreichbare Auflösung reduziert. Ist eine Frage, was man höher priorisiert ...
Schöne Grüße, guten Flug & guten Rutsch
Zlui
Anhänge
-
 502,6 KB Aufrufe: 61
502,6 KB Aufrufe: 61 -
 97 KB Aufrufe: 29
97 KB Aufrufe: 29
OK, ich geb's zu, auf dem oberen Bild isses doch zu klein. Habe nochmal welche nachgemacht, bitteschön ...
Weiter neigen als auf den unteren Bildern würde ich die Kamera übrigens nicht, sonst kommt man zu nah an einen Totpunkt und sie dreht sich nicht sicher wieder zurück. Das wiederum bekäme man in den Griff, wenn man noch den Anlenkungspunkt verlegt, aber das habe ich mir erst mal gespart.
Weiter neigen als auf den unteren Bildern würde ich die Kamera übrigens nicht, sonst kommt man zu nah an einen Totpunkt und sie dreht sich nicht sicher wieder zurück. Das wiederum bekäme man in den Griff, wenn man noch den Anlenkungspunkt verlegt, aber das habe ich mir erst mal gespart.
Anhänge
-
 239,1 KB Aufrufe: 40
239,1 KB Aufrufe: 40 -
 204,8 KB Aufrufe: 30
204,8 KB Aufrufe: 30 -
 226,2 KB Aufrufe: 28
226,2 KB Aufrufe: 28 -
 1,5 MB Aufrufe: 37
1,5 MB Aufrufe: 37

