
CableCam mit BL-Gimbal
- Themenstarter Jogijo
- Beginndatum
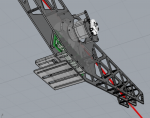
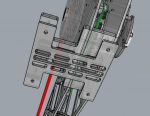
Ich habe jetzt den Gimbalträger nochmals neu designed.
* Langloch für Ronin Adapter direkt an der Cablecam
* Langloch für Wire Rope Isolators oder andere Dämpfer (außen jeweils)
* Extra Grundplatte die entweder direkt verschraubt wird, weglassen wird oder die über die Dämpfer mit der Cablecam-Platte verbunden sind.
* Die extra Grundplatte hat ebenfalls Langlöcher für den Ronin Adapter
Der Hebel zum fixieren des Ronin ist jetzt noch ein Problem. Den kann man nicht mehr komplett drehen. Egal wie rum ich den einbaue...
* Langloch für Ronin Adapter direkt an der Cablecam
* Langloch für Wire Rope Isolators oder andere Dämpfer (außen jeweils)
* Extra Grundplatte die entweder direkt verschraubt wird, weglassen wird oder die über die Dämpfer mit der Cablecam-Platte verbunden sind.
* Die extra Grundplatte hat ebenfalls Langlöcher für den Ronin Adapter
Der Hebel zum fixieren des Ronin ist jetzt noch ein Problem. Den kann man nicht mehr komplett drehen. Egal wie rum ich den einbaue...
Zuletzt bearbeitet:
Wir sind noch am finalisieren des Designs, aber klar, selbstverständlich veröffentliche ich die Pläne.
Start/Endpunkte ist im CableCam Controller implementiert.
wernerdaehn/CC3D-CableCam-Controller
Start/Endpunkte ist im CableCam Controller implementiert.
wernerdaehn/CC3D-CableCam-Controller
Ich habe jetzt angefangen die Pläne und Dokumentation hoch zu laden. In ein eigenes Repo in github.
wernerdaehn/cablecam_directdrive
Aktuell werden gerade die Teile gefertigt, dann kann ich sie zusammenbauen und schauen ob ich irgendwo einen schweren Fehler habe. Glaube nicht, aber...
Sobald ich sie baue, dokumentiere ich das wieder als Bauanleitung.
wernerdaehn/cablecam_directdrive
Aktuell werden gerade die Teile gefertigt, dann kann ich sie zusammenbauen und schauen ob ich irgendwo einen schweren Fehler habe. Glaube nicht, aber...
Sobald ich sie baue, dokumentiere ich das wieder als Bauanleitung.

Also was Elmar da jetzt mit CFK gefertigt hat ist einfach eine Wucht.
wernerdaehn/cablecam_directdrive
wernerdaehn/cablecam_directdrive
Zuletzt bearbeitet:
Also vorab, mega großes Lob an euch alle. Ihr habt da echt eine mega Leistung an den Tag gezaubert.
Dementsprechend habe ich mir hier auch mal fix an zwei Abenden durch 70 Seiten Material gelesen (das sind 1389 Posts über fast 7 Jahre verteilt). Dementsprechend ist mir auch eine Person hier immer wieder und wieder aufgefallen und das ist der liebe Yang, wirklich spitzen Leistung und vollem ein mega Engagement was auch nach 6 Jahren Entwicklung unvergleichbar ist. Na ja genug von der Schleimerei.
In letzter Zeit habe ich mich viel mit Kamera’s und Kamera Equipment beschäftigt, hauptsächlich bin ich Student mit ein bisschen know-how in Richtung Maschinenbau, daher dachte ich mir baust du dir doch dein Equipment einfach selber. Bei dem Kamera Slider und dem Gimbal mag das alles noch gehen, aber auch bei der Cable Cam war ich guter Dinge. Ein bisschen fräsen, ein Motor dran klatschen ein paar Laufräder ausfindig machen und sich eine antriebsrolle fräsen lassen, alles ja noch relativ einfach.
Na ja falsch gedacht, ich bin auf eueren Thread aufmerksam geworden und habe dann erst realisiert wie viel dahintersteckt, ich habe dank euch so viel gelernt und freue mich auch bald meine Pläne in die Tat umzusetzen. Davor muss aber noch der Gimbal in die Tat umgesetzt werden.
(Übrigens habe ich großen Respekt vor der Programmierung der Mikro Controller, ich hatte zwar mal Informationstechnik in der Uni und habe mit Java programmiert, dass war aber wirklich nur mal ein kleines bisschen an der Oberfläche gekratzt).
Zudem muss ich sagen das ich im RC Hobby absoluter Neuling bin und erst dadurch aufmerksam geworden bin nachdem ich die Inspiration für eine Cable Cam hatte. Also nehmt es mir nicht übel, wenn ich bei den ein oder anderen Posts von euch leider nur Bahnhof verstanden hab wenn es ums technische ging.
Ich habe viele Variationen von brushed dc Motor, brushless direkt drive, mit gearbox oder über Riemen antrieb gesehen. Das ist natürlich schon einige Jahre her als diese Posts aktuell waren.
Ich schätze in der Technik hat sich einiges geändert und man hat heutzutage auch die Möglichkeit größere Outrunner sensored aufzutreiben.
Meine Frage an euch, was wäre denn zum stand 2020 die eleganteste lösung eine Cable Cam umzusetzen. Mir gefällt die Idee eine brushless direkt Drive mit Encoder um die strecken Daten abzugreifen für den Cable Cam controller von yang.
Ist das möglich mit Komponenten die nicht direkt den Rahmen eines Studenten sprengen oder gestaltet sich das schwierig. Das es nicht günstig wird ist mir bewusst, ich meine damit nur, dass es nicht den Rahmen für ein Hobby Projekt sprengt.
EDIT: Ich habe nun deine Dokumentation auf github gefunden, die erklärt schon mal sehr viel., wenn nicht sogar alles")
LG Timo
Dementsprechend habe ich mir hier auch mal fix an zwei Abenden durch 70 Seiten Material gelesen (das sind 1389 Posts über fast 7 Jahre verteilt). Dementsprechend ist mir auch eine Person hier immer wieder und wieder aufgefallen und das ist der liebe Yang, wirklich spitzen Leistung und vollem ein mega Engagement was auch nach 6 Jahren Entwicklung unvergleichbar ist. Na ja genug von der Schleimerei.
In letzter Zeit habe ich mich viel mit Kamera’s und Kamera Equipment beschäftigt, hauptsächlich bin ich Student mit ein bisschen know-how in Richtung Maschinenbau, daher dachte ich mir baust du dir doch dein Equipment einfach selber. Bei dem Kamera Slider und dem Gimbal mag das alles noch gehen, aber auch bei der Cable Cam war ich guter Dinge. Ein bisschen fräsen, ein Motor dran klatschen ein paar Laufräder ausfindig machen und sich eine antriebsrolle fräsen lassen, alles ja noch relativ einfach.
Na ja falsch gedacht, ich bin auf eueren Thread aufmerksam geworden und habe dann erst realisiert wie viel dahintersteckt, ich habe dank euch so viel gelernt und freue mich auch bald meine Pläne in die Tat umzusetzen. Davor muss aber noch der Gimbal in die Tat umgesetzt werden.
(Übrigens habe ich großen Respekt vor der Programmierung der Mikro Controller, ich hatte zwar mal Informationstechnik in der Uni und habe mit Java programmiert, dass war aber wirklich nur mal ein kleines bisschen an der Oberfläche gekratzt).
Zudem muss ich sagen das ich im RC Hobby absoluter Neuling bin und erst dadurch aufmerksam geworden bin nachdem ich die Inspiration für eine Cable Cam hatte. Also nehmt es mir nicht übel, wenn ich bei den ein oder anderen Posts von euch leider nur Bahnhof verstanden hab wenn es ums technische ging.
Ich habe viele Variationen von brushed dc Motor, brushless direkt drive, mit gearbox oder über Riemen antrieb gesehen. Das ist natürlich schon einige Jahre her als diese Posts aktuell waren.
Ich schätze in der Technik hat sich einiges geändert und man hat heutzutage auch die Möglichkeit größere Outrunner sensored aufzutreiben.
Meine Frage an euch, was wäre denn zum stand 2020 die eleganteste lösung eine Cable Cam umzusetzen. Mir gefällt die Idee eine brushless direkt Drive mit Encoder um die strecken Daten abzugreifen für den Cable Cam controller von yang.
Ist das möglich mit Komponenten die nicht direkt den Rahmen eines Studenten sprengen oder gestaltet sich das schwierig. Das es nicht günstig wird ist mir bewusst, ich meine damit nur, dass es nicht den Rahmen für ein Hobby Projekt sprengt.
EDIT: Ich habe nun deine Dokumentation auf github gefunden, die erklärt schon mal sehr viel., wenn nicht sogar alles
LG Timo
Zuletzt bearbeitet:
Hi Timo, die letzte Variante mit oDrive und direct drive und Carbonrahmen ist wirklich schön geworden. Jemand anderes hat noch bei meinem Laufrad die Magnete ersetzt durch eine Achsaufhängung mit einem zweiten Encoder aus dem oDrive. Damit ist natürlich die Genauigkeit um Faktoren höher.
Das ist auch alles günstig, aber nicht unbedingt billig im absoluten Betrag gesehen.
RC Technik ist relativ straight forward, Microcontroller benötigen einiges an Vorwissen und Einarbeitungszeit.
Das schöne am oDrive ist, dass die Logik im Microcontroller sehr viel einfacher wird.
Das ist auch alles günstig, aber nicht unbedingt billig im absoluten Betrag gesehen.
RC Technik ist relativ straight forward, Microcontroller benötigen einiges an Vorwissen und Einarbeitungszeit.
Das schöne am oDrive ist, dass die Logik im Microcontroller sehr viel einfacher wird.
Ich werde mich demnächst einmal dran versuchen nachdem ich den Gimbal gebaut habe, so wie es aussieht hab ich ja auf deiner Github Seite alles um loszulegen.
Wenn es soweit ist werde ich dann auch einmal mein Ergebnis präsentieren und hoffe das es alles so funktioniert wie es sollte
Ich schätze mal um sich da etwas schlau zu machen um mit Odrive zu arbeiten wird deren Website mit Dokumentation reichen.
LG und danke für die antwort.
Wenn es soweit ist werde ich dann auch einmal mein Ergebnis präsentieren und hoffe das es alles so funktioniert wie es sollte
Ich schätze mal um sich da etwas schlau zu machen um mit Odrive zu arbeiten wird deren Website mit Dokumentation reichen.
LG und danke für die antwort.
Zuletzt bearbeitet:
Hallo zusammen,
ich bin dabei mir eine Cablecam zu bauen.
Da ich einige Fragen bzgl. der passenden Seile habe, habe ich einen extra Thread erstellt, damit man ein wenig die Übersicht behalten kann.
Evtl. wäre es auch für die Moderatoren interessant, einen Unterordner für Cablecamprojekte anzulegen.
Hier findet Ihr den Seilthread:
Das richtige Seil für die Cablecam
LG
oxxe
ich bin dabei mir eine Cablecam zu bauen.
Da ich einige Fragen bzgl. der passenden Seile habe, habe ich einen extra Thread erstellt, damit man ein wenig die Übersicht behalten kann.
Evtl. wäre es auch für die Moderatoren interessant, einen Unterordner für Cablecamprojekte anzulegen.
Hier findet Ihr den Seilthread:
Das richtige Seil für die Cablecam
LG
oxxe
Hallo nochmal,
ich habe mir im Wahn, bevor ich hier gelandet bin, einen Ejoyous 6384 120KV sensored Brushless, mit dem Hintergedanken bestellt, einen potenten Direkantrieb zu bauen, der auch mal eine größere Kamera ala Red oder Arri fahren kann.
Jetzt liegt das schwere Ding (1050g) hier und möchte genutzt werden.
Ich habe mir überlegt, dass mein Schlitten maximal 40km/h fahren können soll.
Wenn ich ein 100mm Antriebsrad nutze, dann müsste ich es mit 1272U/min rotieren lassen, damit ich auf die 40km/h komme.
Auf die 120kv von meinem Motor gerechnet, benötige ich dafür 10,6V.
Ist das erstmal soweit richtig durchdacht?
Ich frage mich, wieso hier niemand so weit mit der KV-Zahl runter geht...
Da ich gerade nicht so viel Zeit habe und schon bald das erste Projekt ansteht, möchte ich mich nun erstmal um die Hardware kümmern und mit einem Modellbau-ESC starten.
Da hat sich in diesem Thread wohl der TS120 oder TS160 bewährt. Mir macht nur die Obergrenze von 3S (11,1V) gedanken. Wenn ich so rechnen kann, wie oben beschrieben, dann bestelle ich mir den TS120. Falls dem aber nicht so ist, dann darf ich mich mit den Rückwärtsfahrtproblemen vom TS150 auseinandersetzen.
@yang: Hast du irgendwo eine Zeichnung für die Platine deines Hallsensors, die ich evtl. nutzen dürfte?
Wäre cool, wenn mir jemand kurz helfen könnte.
LG
oxxe
ich habe mir im Wahn, bevor ich hier gelandet bin, einen Ejoyous 6384 120KV sensored Brushless, mit dem Hintergedanken bestellt, einen potenten Direkantrieb zu bauen, der auch mal eine größere Kamera ala Red oder Arri fahren kann.
Jetzt liegt das schwere Ding (1050g) hier und möchte genutzt werden.
Ich habe mir überlegt, dass mein Schlitten maximal 40km/h fahren können soll.
Wenn ich ein 100mm Antriebsrad nutze, dann müsste ich es mit 1272U/min rotieren lassen, damit ich auf die 40km/h komme.
Auf die 120kv von meinem Motor gerechnet, benötige ich dafür 10,6V.
Ist das erstmal soweit richtig durchdacht?
Ich frage mich, wieso hier niemand so weit mit der KV-Zahl runter geht...
Da ich gerade nicht so viel Zeit habe und schon bald das erste Projekt ansteht, möchte ich mich nun erstmal um die Hardware kümmern und mit einem Modellbau-ESC starten.
Da hat sich in diesem Thread wohl der TS120 oder TS160 bewährt. Mir macht nur die Obergrenze von 3S (11,1V) gedanken. Wenn ich so rechnen kann, wie oben beschrieben, dann bestelle ich mir den TS120. Falls dem aber nicht so ist, dann darf ich mich mit den Rückwärtsfahrtproblemen vom TS150 auseinandersetzen.
@yang: Hast du irgendwo eine Zeichnung für die Platine deines Hallsensors, die ich evtl. nutzen dürfte?
Wäre cool, wenn mir jemand kurz helfen könnte.
LG
oxxe
Zuletzt bearbeitet:
Hallo nochmal,
ich habe mir im Wahn, bevor ich hier gelandet bin, einen Ejoyous 6384 120KV sensored Brushless, mit dem Hintergedanken bestellt, einen potenten Direkantrieb zu bauen, der auch mal eine größere Kamera ala Red oder Arri fahren kann.
Jetzt liegt das schwere Ding (1050g) hier und möchte genutzt werden.
Ich habe mir überlegt, dass mein Schlitten maximal 40km/h fahren können soll.
Wenn ich ein 100mm Antriebsrad nutze, dann müsste ich es mit 1272U/min rotieren lassen, damit ich auf die 40km/h komme.
Auf die 120kv von meinem Motor gerechnet, benötige ich dafür 10,6V.
Ist das erstmal soweit richtig durchdacht?
Ich frage mich, wieso hier niemand so weit mit der KV-Zahl runter geht...
Da ich gerade nicht so viel Zeit habe und schon bald das erste Projekt ansteht, möchte ich mich nun erstmal um die Hardware kümmern und mit einem Modellbau-ESC starten.
Da hat sich in diesem Thread wohl der TS120 oder TS160 bewährt. Mir macht nur die Obergrenze von 3S (11,1V) gedanken. Wenn ich so rechnen kann, wie oben beschrieben, dann bestelle ich mir den TS120. Falls dem aber nicht so ist, dann darf ich mich mit den Rückwärtsfahrtproblemen vom TS150 auseinandersetzen.
Noch eine Frage (wahrscheinlich direkt an dich, @yang):
Das Flip32F4 ist zur Zeit eher schwer zu bekommen. Schon alleine wegen dem Neujahrsfest verzögert sich aus China sowieso alles enorm.
Kannst du mir eine vernünftige alternative nennen, bei der ich nicht alles in deinen Github-libraries neu erdenken muss, um etwas anzuschließen?
@yang: Hast du irgendwo eine Zeichnung für die Platine deines Hallsensors, die ich evtl. nutzen dürfte?
Wäre cool, wenn mir jemand kurz helfen könnte.
LG
oxxe
ich habe mir im Wahn, bevor ich hier gelandet bin, einen Ejoyous 6384 120KV sensored Brushless, mit dem Hintergedanken bestellt, einen potenten Direkantrieb zu bauen, der auch mal eine größere Kamera ala Red oder Arri fahren kann.
Jetzt liegt das schwere Ding (1050g) hier und möchte genutzt werden.
Ich habe mir überlegt, dass mein Schlitten maximal 40km/h fahren können soll.
Wenn ich ein 100mm Antriebsrad nutze, dann müsste ich es mit 1272U/min rotieren lassen, damit ich auf die 40km/h komme.
Auf die 120kv von meinem Motor gerechnet, benötige ich dafür 10,6V.
Ist das erstmal soweit richtig durchdacht?
Ich frage mich, wieso hier niemand so weit mit der KV-Zahl runter geht...
Da ich gerade nicht so viel Zeit habe und schon bald das erste Projekt ansteht, möchte ich mich nun erstmal um die Hardware kümmern und mit einem Modellbau-ESC starten.
Da hat sich in diesem Thread wohl der TS120 oder TS160 bewährt. Mir macht nur die Obergrenze von 3S (11,1V) gedanken. Wenn ich so rechnen kann, wie oben beschrieben, dann bestelle ich mir den TS120. Falls dem aber nicht so ist, dann darf ich mich mit den Rückwärtsfahrtproblemen vom TS150 auseinandersetzen.
Noch eine Frage (wahrscheinlich direkt an dich, @yang):
Das Flip32F4 ist zur Zeit eher schwer zu bekommen. Schon alleine wegen dem Neujahrsfest verzögert sich aus China sowieso alles enorm.
Kannst du mir eine vernünftige alternative nennen, bei der ich nicht alles in deinen Github-libraries neu erdenken muss, um etwas anzuschließen?
@yang: Hast du irgendwo eine Zeichnung für die Platine deines Hallsensors, die ich evtl. nutzen dürfte?
Wäre cool, wenn mir jemand kurz helfen könnte.
LG
oxxe
Was ich dazu noch erwähnen sollte:
Die technischen Daten besagen, dass der Motor nur mit 24-36V läuft, was ja weder für den Direktantrieb, noch für den 3S Regler spricht...
Was ist eure Meinung?
Spezifikationen:
Zustand: 100% nagelneu
Artikeltyp: Bürstenloser Motor
Material: Legierung
Modell: 6384
Motor KV: 120 kV
Spannung: 24-36V
Höchstgeschwindigkeit: 45 km / h
Leistung: 4600W
Entladene Geschwindigkeit: 3600 U / min / 24V
Entlasteter Strom: 2,5 A / 12 V.
Wirkungsgrad: 85%
Maximale Tragfähigkeit: 150 kg
Achsdurchmesser: 10 mm
Größe: Ca. 63 * 80 mm / 2,5 * 3,1 Zoll
Ungefähres Gewicht. 1052 g
Also 4,5kW sind reichlich...übertrieben. Schadet natürlich nicht, aber ein Eigengewicht von 1kg ist eine Ansage.
Mal kurz rechnen:
40km/h = 11m/s
P=F*v = m*a*v --> m = P/a/v
nehmen wir a = 1g = 9,81m/s²
--> m = 4600/9,81/11,1 = 42kg
Mit dem Motor könntest Du also die Cablecam mit 40km/h senkrecht nach oben fahren lassen wenn sie 42kg wiegt. Du wirst eine große Kamera nicht wie einen Sportwagen beschleunigen wollen, schon gar nicht bei so niedrigen Endgeschwindigkeiten.
Du hättest also die Endgeschwindigkeit von 40km/h in knapp über einer Sekunde erreicht.
v = a * t --> t = v/a = 11,1m/s/9,81m/s² = 1,1s
Mein aktueller Lieblings-Motor ist der von oDrive mit 1,8kW und selbst das ist mehr als genug. Wiegt 400g, 8mm Welle, 270kV. Es gibt aber auch einen anderen mit 10mm Welle und 150kV.
ODrive Europe
Ein weiterer Punkt wird sein, dass eine normale ESC wie die TS120 oder TS150 nicht mit Motoren mit so kleinen kV Werten umgehen kann. Mal ganz abgesehen dass sie nicht die Volt und schon gar nicht das nötige Ampere Rating hat. Ich vermute, würdest Du Deinen Motor mit der TS120 verbinden, bewegt er sich. 11V heißt ja nicht dass darunter keine Magnetfelder im Motor aufgebaut werden, sondern nur wo sein optimaler Wirkungsgrad ist und was das max Rating ist. Und sobald du etwas mehr Gas gibst, brennt die ESC ab.
Grundsätzlich würde ich eine andere Frage stellen: Warum RC Car ESCs und Motoren? Wir haben damit angefangen weil eine Robotik-ESC 1000EUR und mehr gekostet hat und für eine feste Stromversorgung ausgelegt war, nicht Akkus. Deswegen konnten wir auch keine vernünftigen Motoren verwenden, primär weil diese Motoren mit geringen KVs keinen Sensor eingebaut haben. Mit der VESC hat sich der erste Teil geändert, allerdings müssen es nach wie vor Motoren mit Sensor sein, also welche aus dem Hobbybereich.
Das ODrive hat alles geändert. Es verwendet nicht mehr Hallsensoren sondern einen hochpräzisen Encoder auf der Welle, hat Limiter selbst in der Firmware eingebaut und man bekommt alles aus einer Hand - ESC, Motor, Sensor. Ich würde also dringend empfehlen in diese Richtung zu gehen!
Von meiner Seite gibt es beim oDrive nur zwei Punkte die fehlen.
1. Absolut-Encoder anstatt Index-Encoder: Ein Index-Encoder hat keinen festen Nullpunkt, sondern man muss nach dem Einschalten der ESC den Nullpunkt kalibrieren. Die ESC dreht dafür den Motor für eine Umdrehung und fertig. Würde die ESC auch nur einen Count mal überspringen, passt der Nullpunkt im Laufe des Betriebs immer weniger. Passiert nicht aber ein Absolut-Encoder hat beide Probleme nicht. Der wird einmal eingebaut und solange er mechanisch gleich eingebaut bleibt, liefert er bei 0° Drehung die Position 0. Das wird gerade in die oDrive Firmware eingebaut, allerdings hat man festgestellt dass der zugehörige Encoder von CUI einen Fehler im SPI Protokoll hat. Heute müssten wir also einen Index-Encoder verwenden, in ein paar Monaten sollte es dann eine geringfügig sicherere Lösung geben. No big deal.
2. Die ESC kann nur den Motor-Encoder auswerten, nicht einen zweiten Encoder zusätzlich. Wenn man also der ESC sagt, fahre 1000 Umdrehungen vorwärts, dann macht sie genau das. Fährt den Motor langsam hoch bis die Endgeschwindigkeit erreicht ist und dann geht die Geschwindigkeit langsam wieder runter um den Endpunkt exakt zu treffen. Nut hat der Motor am Seil natürlich Schlupf. Wir wollen ja nicht den Motor 1000 mal drehen, sondern wir wollen einen Punkt am Seil anfahren. Darum kommt ein zweiter Encoder auf ein Laufrad, der die Position am Seil misst. Die ESC müsste also den Encoder am Motor für den aktuellen Drehwinkel des Motors hernehmen - um die richtigen Spulen zu magnetisieren - und den Encoder am Laufrad für das Positionieren.
Mit dem oDrive zusammen dient mein Encoder also nur für letzteres, dem setzen der Endpunkte. Und dem Programmieren der Endpunkte über die Fernsteuerung.
Mal kurz rechnen:
40km/h = 11m/s
P=F*v = m*a*v --> m = P/a/v
nehmen wir a = 1g = 9,81m/s²
--> m = 4600/9,81/11,1 = 42kg
Mit dem Motor könntest Du also die Cablecam mit 40km/h senkrecht nach oben fahren lassen wenn sie 42kg wiegt. Du wirst eine große Kamera nicht wie einen Sportwagen beschleunigen wollen, schon gar nicht bei so niedrigen Endgeschwindigkeiten.
Du hättest also die Endgeschwindigkeit von 40km/h in knapp über einer Sekunde erreicht.
v = a * t --> t = v/a = 11,1m/s/9,81m/s² = 1,1s
Mein aktueller Lieblings-Motor ist der von oDrive mit 1,8kW und selbst das ist mehr als genug. Wiegt 400g, 8mm Welle, 270kV. Es gibt aber auch einen anderen mit 10mm Welle und 150kV.
ODrive Europe
Ein weiterer Punkt wird sein, dass eine normale ESC wie die TS120 oder TS150 nicht mit Motoren mit so kleinen kV Werten umgehen kann. Mal ganz abgesehen dass sie nicht die Volt und schon gar nicht das nötige Ampere Rating hat. Ich vermute, würdest Du Deinen Motor mit der TS120 verbinden, bewegt er sich. 11V heißt ja nicht dass darunter keine Magnetfelder im Motor aufgebaut werden, sondern nur wo sein optimaler Wirkungsgrad ist und was das max Rating ist. Und sobald du etwas mehr Gas gibst, brennt die ESC ab.
Grundsätzlich würde ich eine andere Frage stellen: Warum RC Car ESCs und Motoren? Wir haben damit angefangen weil eine Robotik-ESC 1000EUR und mehr gekostet hat und für eine feste Stromversorgung ausgelegt war, nicht Akkus. Deswegen konnten wir auch keine vernünftigen Motoren verwenden, primär weil diese Motoren mit geringen KVs keinen Sensor eingebaut haben. Mit der VESC hat sich der erste Teil geändert, allerdings müssen es nach wie vor Motoren mit Sensor sein, also welche aus dem Hobbybereich.
Das ODrive hat alles geändert. Es verwendet nicht mehr Hallsensoren sondern einen hochpräzisen Encoder auf der Welle, hat Limiter selbst in der Firmware eingebaut und man bekommt alles aus einer Hand - ESC, Motor, Sensor. Ich würde also dringend empfehlen in diese Richtung zu gehen!
Von meiner Seite gibt es beim oDrive nur zwei Punkte die fehlen.
1. Absolut-Encoder anstatt Index-Encoder: Ein Index-Encoder hat keinen festen Nullpunkt, sondern man muss nach dem Einschalten der ESC den Nullpunkt kalibrieren. Die ESC dreht dafür den Motor für eine Umdrehung und fertig. Würde die ESC auch nur einen Count mal überspringen, passt der Nullpunkt im Laufe des Betriebs immer weniger. Passiert nicht aber ein Absolut-Encoder hat beide Probleme nicht. Der wird einmal eingebaut und solange er mechanisch gleich eingebaut bleibt, liefert er bei 0° Drehung die Position 0. Das wird gerade in die oDrive Firmware eingebaut, allerdings hat man festgestellt dass der zugehörige Encoder von CUI einen Fehler im SPI Protokoll hat. Heute müssten wir also einen Index-Encoder verwenden, in ein paar Monaten sollte es dann eine geringfügig sicherere Lösung geben. No big deal.
2. Die ESC kann nur den Motor-Encoder auswerten, nicht einen zweiten Encoder zusätzlich. Wenn man also der ESC sagt, fahre 1000 Umdrehungen vorwärts, dann macht sie genau das. Fährt den Motor langsam hoch bis die Endgeschwindigkeit erreicht ist und dann geht die Geschwindigkeit langsam wieder runter um den Endpunkt exakt zu treffen. Nut hat der Motor am Seil natürlich Schlupf. Wir wollen ja nicht den Motor 1000 mal drehen, sondern wir wollen einen Punkt am Seil anfahren. Darum kommt ein zweiter Encoder auf ein Laufrad, der die Position am Seil misst. Die ESC müsste also den Encoder am Motor für den aktuellen Drehwinkel des Motors hernehmen - um die richtigen Spulen zu magnetisieren - und den Encoder am Laufrad für das Positionieren.
Mit dem oDrive zusammen dient mein Encoder also nur für letzteres, dem setzen der Endpunkte. Und dem Programmieren der Endpunkte über die Fernsteuerung.
Bezüglich Hallsensor am Laufrad: Klar kann ich Dir das Platinenlayout schicken. Muss ich irgendwo rumliegen haben. Da Du die CableCam aber selbst baust, könntest Du den gleichen Encoder vom oDrive stattdessen verwenden. Dazu muss die Laufradbefestigung passend geändert werden. Jemand hat das gemacht und mir eine Version dafür zur Verfügung gestellt. Ich hab's aber noch nicht eingebaut.
Mein Hall-Sensor ist mehr eine Bastellösung. Sieht nicht gut aus, unverhältnismäßig teuer die Platinen zu bestellen, und eher eine wackelige G'schicht. CUI Encoder ist besser!
Mein Hall-Sensor ist mehr eine Bastellösung. Sieht nicht gut aus, unverhältnismäßig teuer die Platinen zu bestellen, und eher eine wackelige G'schicht. CUI Encoder ist besser!
Ok, danke für die ausführliche Antwort!
Der Motor wird dann wohl für spätere Projekte in die Ecke gelegt. Wie schon erwähnt, da war ich etwas vorschnell unterwegs....
Bis jetzt stehe ich scheinbar noch immer auf dem Schlauch:
Soweit ich es verstanden habe, hast du die Stockfirmware vom Odrive modifiziert, richtig?
Wäre ja auch seltsam, wenn die schon perfekt für eine Cablecam erstellt worden wäre...
Über welches Protokoll wird der Odrive angesprochen, wenn ich direkt den Reciever anschließen?
Auf der Homepage wird PWM erwähnt, jedoch nicht z.B. sBus.
Du sprachst darüber, dass das Controllerboard optional ist.
Wie Teile ich ihm mit, wo die Limits (reden wir von der gleichen Sache, wenn wir vom "Limiter" sprechen? Ich verstehe darunter Endpunkte auf dem Seil)
Wenn dem so ist: Gibts diese Firmware auf github? Ich habe nichts gefunden...
Die Modellbau-ESC-Idee ist entstanden, weil ich nicht viel Zeit habe, um mich um die Elektronik zu kümmern, bis ich das Gerät das erste Mal einsetze.
Wenn ich nun einfach den Odrive inkl. Motor kaufen und eine modifizierte, fertige Firmware aufspielen muss, dann passt das. Ansonsten habe ich erstmal keine Zeit mich da groß reinzufuchsen und bin gezwungen etwas fertiges ala Modellbau-ESC zu nutzen.
Ich hoffe, dass ich hier nicht Fragen zu den offensichtlichsten Antworten stelle...
LG
Der Motor wird dann wohl für spätere Projekte in die Ecke gelegt. Wie schon erwähnt, da war ich etwas vorschnell unterwegs....
Bis jetzt stehe ich scheinbar noch immer auf dem Schlauch:
Soweit ich es verstanden habe, hast du die Stockfirmware vom Odrive modifiziert, richtig?
Wäre ja auch seltsam, wenn die schon perfekt für eine Cablecam erstellt worden wäre...
Über welches Protokoll wird der Odrive angesprochen, wenn ich direkt den Reciever anschließen?
Auf der Homepage wird PWM erwähnt, jedoch nicht z.B. sBus.
Du sprachst darüber, dass das Controllerboard optional ist.
Wie Teile ich ihm mit, wo die Limits (reden wir von der gleichen Sache, wenn wir vom "Limiter" sprechen? Ich verstehe darunter Endpunkte auf dem Seil)
Wenn dem so ist: Gibts diese Firmware auf github? Ich habe nichts gefunden...
Die Modellbau-ESC-Idee ist entstanden, weil ich nicht viel Zeit habe, um mich um die Elektronik zu kümmern, bis ich das Gerät das erste Mal einsetze.
Wenn ich nun einfach den Odrive inkl. Motor kaufen und eine modifizierte, fertige Firmware aufspielen muss, dann passt das. Ansonsten habe ich erstmal keine Zeit mich da groß reinzufuchsen und bin gezwungen etwas fertiges ala Modellbau-ESC zu nutzen.
Ich hoffe, dass ich hier nicht Fragen zu den offensichtlichsten Antworten stelle...
LG
Zuletzt bearbeitet:
Kein Problem. Ich würde in 2 Schritten vorgehen:
1. Odrive mit Motor und Encoder kaufen. Dort direkt den Empfänger anschließen (per PWM). Damit kannst Du schon mal sehr schön durch die Gegend fahren und erste Erfahrungen sammeln. Ich bin mir nicht sicher welche Funktionalitäten damit möglich sind. Nur Schubsteuerung? Geschwindigkeitssteuerung? Positionale Steuerung? Wir wollen natürlich über die Fernsteuerung den Zielpunkt verschieben, aber wie gesagt, ich weiß nicht welchen Parameter der PWM Eingang am oDrive ansteuern kann. In deren Forum mal fragen?
2. Odrive von PWM auf UART umstellen und meinen Controller dazwischen schalten. Jetzt sagst Du dem meinem Controller über die Fernsteuerung was Du möchtest, Endpunkt setzen, Beschleunigung erhöhen, Zielpunkt anfahren,... und mein Controller übersetzt das in das oDrive UART Protokoll und sendet den zugehörigen Befehl an das oDrive, etwas "fahre an die Position xyz".
1. Odrive mit Motor und Encoder kaufen. Dort direkt den Empfänger anschließen (per PWM). Damit kannst Du schon mal sehr schön durch die Gegend fahren und erste Erfahrungen sammeln. Ich bin mir nicht sicher welche Funktionalitäten damit möglich sind. Nur Schubsteuerung? Geschwindigkeitssteuerung? Positionale Steuerung? Wir wollen natürlich über die Fernsteuerung den Zielpunkt verschieben, aber wie gesagt, ich weiß nicht welchen Parameter der PWM Eingang am oDrive ansteuern kann. In deren Forum mal fragen?
2. Odrive von PWM auf UART umstellen und meinen Controller dazwischen schalten. Jetzt sagst Du dem meinem Controller über die Fernsteuerung was Du möchtest, Endpunkt setzen, Beschleunigung erhöhen, Zielpunkt anfahren,... und mein Controller übersetzt das in das oDrive UART Protokoll und sendet den zugehörigen Befehl an das oDrive, etwas "fahre an die Position xyz".

