
CableCam mit BL-Gimbal
- Themenstarter Jogijo
- Beginndatum
Kleines Update:
Ich habe die Baupläne jetzt bei Github eingestellt: https://github.com/wernerdaehn/cablecam/blob/master/README.md
Ich habe mir eine VESC 6 gekauft und erweitere gerade den CableCam Controller so, das er mit der VESC über UART spricht.
Der große Vorteil der VESC ist deren Speed Regler. Man sagt ihr einfach sie soll 3km/h fahren und das macht sie dann. Bergauf, im Flachen oder bergab indem sie bremst. Stillstand geht noch nicht, ist aber auf dem Plan. Ich hoffe aber auch hier per UART wirklich einen Stillstand erreichen zu können, indem ich den Drehwinkel des Motors festhalte. Mal sehen....
Ich habe die Baupläne jetzt bei Github eingestellt: https://github.com/wernerdaehn/cablecam/blob/master/README.md
Ich habe mir eine VESC 6 gekauft und erweitere gerade den CableCam Controller so, das er mit der VESC über UART spricht.
Der große Vorteil der VESC ist deren Speed Regler. Man sagt ihr einfach sie soll 3km/h fahren und das macht sie dann. Bergauf, im Flachen oder bergab indem sie bremst. Stillstand geht noch nicht, ist aber auf dem Plan. Ich hoffe aber auch hier per UART wirklich einen Stillstand erreichen zu können, indem ich den Drehwinkel des Motors festhalte. Mal sehen....
UART Kommunikation läuft. Ich muss sagen, bis jetzt gefällt mir alles!
Das mit der Bremse muss ich mir als nächstes ansehen, ob da was zu machen ist.
Ich habe jetzt auch noch eine Expo-Funktion auf den Input gelegt, damit man bei langsamen Geschwindigkeiten sehr fein regeln kann, bei hohen Geschwindigkeiten dafür gröber.
Das mit der Bremse muss ich mir als nächstes ansehen, ob da was zu machen ist.
Ich habe jetzt auch noch eine Expo-Funktion auf den Input gelegt, damit man bei langsamen Geschwindigkeiten sehr fein regeln kann, bei hohen Geschwindigkeiten dafür gröber.
VESC6 Ergebnisse
Halten am Berg ist noch nicht gut genug, besser als alles andere, aber nicht perfekt.
Speed Mode ist genial.
https://youtu.be/1NV-bPIsbX0
Halten am Berg ist noch nicht gut genug, besser als alles andere, aber nicht perfekt.
Speed Mode ist genial.
https://youtu.be/1NV-bPIsbX0
Ronin-Schnellwechselplatte
Ich habe mir mal diesen Schnellwechseladapter besorgt und der passt hervorragend zur CableCam dazu.
https://www.ebay.de/itm/SmallRig-DJ...repied-Adaptateur-Montage-plaque/263141806315
(Suchen nach SmallRig 1682, weltweit. Achtung! Die Preise variieren von 20EUR bis 100EUR inkl Versand)
Was man dann noch braucht sind längere 1/4" Stativschrauben, die bekommt man aber überall her.
Nett ist dass der Hebel zum Festmachen des Ronin sich gut ausgeht, als wäre die Baseplate dafür designed.


Ich habe mir mal diesen Schnellwechseladapter besorgt und der passt hervorragend zur CableCam dazu.
https://www.ebay.de/itm/SmallRig-DJ...repied-Adaptateur-Montage-plaque/263141806315
(Suchen nach SmallRig 1682, weltweit. Achtung! Die Preise variieren von 20EUR bis 100EUR inkl Versand)
Was man dann noch braucht sind längere 1/4" Stativschrauben, die bekommt man aber überall her.
Nett ist dass der Hebel zum Festmachen des Ronin sich gut ausgeht, als wäre die Baseplate dafür designed.
Nicht das die Motoren für uns interessant wären aber die Richtung stimmt...
https://www.crowdsupply.com/iq-motion-control/iq-motor-module
https://www.crowdsupply.com/iq-motion-control/iq-motor-module
Habt ihr die Cablecam gesehen? Finde ich vom mechanischen Aufbau her schick mit der FAltoption:
https://www.kickstarter.com/project...he-easy-cable-cam-for-impossible-film?lang=de
Und noch ne andere Sache:
Hat mal jemand überlegt Servomotoren mit Step/Dir Ansteuerung zu verwenden wie sie z.B. bei CNC Fräsen genutzt werden? Ähnlich wie Schrittmotoren, aber eben mit aktivem internem Feedback und höherer Drehzahl.
Die JMC Servos sind gerade bei den Fräsenbauern sehr gefragt da gut und bezahlbar. Gibts hier http://shop.cnc-technics.de/product...op-servo-motor-36vdc-jmc-ihsv57-30-18-36.html
oder bei Aliexpress/Ebay.
Ansteuerung erfolgt über Taktung von Schritten, wie beim Schrittmotor mit Endstufe. Gefahrener Weg und Speed lässt sich so also einfach über Schrittanzahl und Rate vorgeben. Erfolgt kein Schritt, hält der Motor selbst aktiv die Ist Pos.
Wenn man noch weiter gehen will könnte man die Ansteuerung/Automatisierung recht einfach per grbl/GCode machen, da sind dann direkt Entfernungs Limits, Rampen, etc... drin.
Evtl läßt sich der Encoder am Motor auch abnehmen und an ein 2. freilaufendes Seilrad koppeln, dann wird auch Schlupf am Antriebsrad kompensiert.
- nur so ne Idee -
https://www.kickstarter.com/project...he-easy-cable-cam-for-impossible-film?lang=de
Und noch ne andere Sache:
Hat mal jemand überlegt Servomotoren mit Step/Dir Ansteuerung zu verwenden wie sie z.B. bei CNC Fräsen genutzt werden? Ähnlich wie Schrittmotoren, aber eben mit aktivem internem Feedback und höherer Drehzahl.
Die JMC Servos sind gerade bei den Fräsenbauern sehr gefragt da gut und bezahlbar. Gibts hier http://shop.cnc-technics.de/product...op-servo-motor-36vdc-jmc-ihsv57-30-18-36.html
oder bei Aliexpress/Ebay.
Ansteuerung erfolgt über Taktung von Schritten, wie beim Schrittmotor mit Endstufe. Gefahrener Weg und Speed lässt sich so also einfach über Schrittanzahl und Rate vorgeben. Erfolgt kein Schritt, hält der Motor selbst aktiv die Ist Pos.
Wenn man noch weiter gehen will könnte man die Ansteuerung/Automatisierung recht einfach per grbl/GCode machen, da sind dann direkt Entfernungs Limits, Rampen, etc... drin.
Evtl läßt sich der Encoder am Motor auch abnehmen und an ein 2. freilaufendes Seilrad koppeln, dann wird auch Schlupf am Antriebsrad kompensiert.
- nur so ne Idee -
Ich finde die sehr nett, weil billig, klein und schnell aufgebaut. Das sie keinen Gimbal hat, stört. So muss man also zwei Geräte in der Hand halten, den Gimbal Controller und den CableCam Controller.
Und sie wird zu starken Pendelbewegungen neigen.
Mein größtes Problem ist aber die Abgrenzung. Für so einfache Tasks würde ich eine Drohne verwenden. Viel flexibler, viel schneller bereit. Das mit der Drohne scheitert erst bei großen Kameras weil dafür die Hürden viel zu hoch sind.
Da spielt dann die CableCam ihre Stärke aus. Das ist auch der Grund warum ich von der kleinen GoPro CableCam weggegangen bin.
So Servomotoren sind sehr interessant, weil sie, wie Du korrekt sagst, alles können was wir brauchen. (In Klammern habe ich die Daten von Deinem Link eingetragen.)
Allerdings sind sie meist teuer (okay, 140EUR ist billig), sehr schwer (1,8kg), langsam (200W), eher bei hohen Volt arbeiten (min 18V).
Also definitiv sollte man Servomotoren weiter beobachten, aber aktuell ist mir kein Antrieb bekannt der nicht mindestens 2 Nachteile hat.
Und sie wird zu starken Pendelbewegungen neigen.
Mein größtes Problem ist aber die Abgrenzung. Für so einfache Tasks würde ich eine Drohne verwenden. Viel flexibler, viel schneller bereit. Das mit der Drohne scheitert erst bei großen Kameras weil dafür die Hürden viel zu hoch sind.
Da spielt dann die CableCam ihre Stärke aus. Das ist auch der Grund warum ich von der kleinen GoPro CableCam weggegangen bin.
So Servomotoren sind sehr interessant, weil sie, wie Du korrekt sagst, alles können was wir brauchen. (In Klammern habe ich die Daten von Deinem Link eingetragen.)
Allerdings sind sie meist teuer (okay, 140EUR ist billig), sehr schwer (1,8kg), langsam (200W), eher bei hohen Volt arbeiten (min 18V).
Also definitiv sollte man Servomotoren weiter beobachten, aber aktuell ist mir kein Antrieb bekannt der nicht mindestens 2 Nachteile hat.
In der aktuellen Version funktioniert jetzt auch das "Play". Endpunkte einstellen und sie fährt von alleine zwischen den Endpunkten hin und her mit 5 Sekunde Pause. Geschwindigkeit und Beschleunigung ist jederzeit einstellbar.
Ich hab' übrigens einen eigenen Youtube Kanal nur für die CableCam aufgemacht. Wenn ihr also über neue Videos informiert werden wollt, dann diesen abonnieren.
wernerdaehn/CC3D-CableCam-Controller
Ich hab' übrigens einen eigenen Youtube Kanal nur für die CableCam aufgemacht. Wenn ihr also über neue Videos informiert werden wollt, dann diesen abonnieren.
wernerdaehn/CC3D-CableCam-Controller
Klar, über zwei Methoden:
wernerdaehn/CC3D-CableCam-Controller
- Ein zweiter Receiver und die Taranis ist mit zwei Receiver gleichzeitig gebunden.
- Der Controller hat einen SBus Ausgang, der geht an einen Inverter und dann an den Ronin.
wernerdaehn/CC3D-CableCam-Controller
Zuletzt bearbeitet:
Bin total überrascht und happy, dass es hier weiter geht.
Mein grösstes Manko war neben dem lauten Piepen (bei Konzerten störend) des Motors, die fehlenden Endpunkte.
Werde mal meinen Neffen an dein Projekt setzen, bin nicht programmierfähig.
Wahrscheinlich werde ich Dich noch mal belästigen müssen...
Mein grösstes Manko war neben dem lauten Piepen (bei Konzerten störend) des Motors, die fehlenden Endpunkte.
Werde mal meinen Neffen an dein Projekt setzen, bin nicht programmierfähig.
Wahrscheinlich werde ich Dich noch mal belästigen müssen...
Wie wir schon seit längerem wissen wäre ein Direct Drive mit Encoder wesentlich genauer. Ich habe mich aber dagegen entschieden, weil Encoder montieren, Motorbefestigung, passender Motor,.... alles viel schwerer wäre.
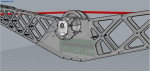
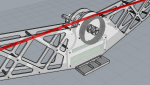
Ich glaube das ändert sich gerade. Ich habe mir von ODriveRobotics mal ein Set aus Controller, Motor und Encoder kommen lassen - gefällt mir sehr gut. Deswegen habe ich jetzt auch mal die CableCam leicht umgezeichnet.
Konkret folgende Änderungen:
Meinungen, Wünsche, Vorschläge?
Ich glaube das ändert sich gerade. Ich habe mir von ODriveRobotics mal ein Set aus Controller, Motor und Encoder kommen lassen - gefällt mir sehr gut. Deswegen habe ich jetzt auch mal die CableCam leicht umgezeichnet.
Konkret folgende Änderungen:
- Kein Getriebe mehr, Motor sitzt direkt an der inneren Seitenwange und das Antriebsrad ist auf dessen Achse montiert.
- Alle Teile aus 2.5 oder 3mm CFK - leichter, schön schwarz
- Distanzmuttern aus Nylon - billiger und schwarz, Festigkeit reicht locker
- Motor wird nicht direkt mit der Seitenwange verschraubt sondern da ist ein 5mm Alu Teil dazwischen, das als Befestigung dient. So verteilt sich die Abwärme des Motors besser und das CFK muss nicht das Biegemoment aufnehmen.
- Der Motorträger hält auch gleich den ODrive Kontroller. Dessen Leistungsmosfets liegen direkt am Alu auf um die Wärme abzuleiten.
- In der Mitte sind weniger Ausschnitte damit man die Elektronik verstecken kann.
- Breite der inneren Distanzbolzen nicht mehr 25mm sondern 30mm
- Die unteren drei Befestigunglöcher, da wo der Gimbalträger verschraubt wird, um 0,5mm nach unten versetzt. Dann muss nicht mehr der Gimbalträger die Bohrung um 0,5mm von der Mittelachse verschoben haben.
- Gimbalträger kleiner, enfacher und nur auf einer Seite. Voller Fokus auf Ronin Quick Release.
- Akkus passen innen, da sie auch nur 30mm dick sind. Wie ich die befestigen soll ist mir noch nciht ganz klar. Einfach hineinstecken? Gehäuse machen? Ich weiß es nicht und darum verbaue ich mir für's erste mal nichts indem ich eine spezielle Position vorsehe. Ser eine wird sie immer in der CableCam haben wollen, der andere zum Laden ausbauen. Vorschläge?
- Weil jetzt der Motor auf der anderen Seite ist, sie ein wenig breiter wird und die Akkus auch möglicherweise nicht mehr zur Balance beitragen, ist der Gimbalträger breiter als nötig, damit man über den Gimbal wieder das Gleichgewicht herstellen kann.
Meinungen, Wünsche, Vorschläge?
Ähm naja hatte ja 3mm konstruiert die dann später durch nen kleinen Rechenfehler so etwa 4mm bis 5 mm wurden und nur die anlageflächen hab ich dann auf die 3mm überfräst. Und bin mit der Stabilität sehr zufrieden. Hab des ganze auf na Cnc gefräst. Mim Wasserstrahlschneiden werden die Kanten sehr schön und mit den scharfen Kanten die muss man eh immer noch mal etwas brechen. Delaminieren ist beim Wasserstrahl schneiden kein Thema und es werden auch sehr saubere Schnitte.

