Funktioniert der Slow-Servo nur bei Schalter oder auch bei Knüppel?

CableCam mit BL-Gimbal
- Themenstarter Jogijo
- Beginndatum
Yang:
Oh, doch so schnell und steil. Hätte ich nicht gedacht.
Nehme immer diese Rechner hier: http://scriptasylum.com/rc_speed/
Oh, doch so schnell und steil. Hätte ich nicht gedacht.
Nehme immer diese Rechner hier: http://scriptasylum.com/rc_speed/




Hallo,
ich habe bisher noch keine Erfahrung mit On-Board Brushless Motoren. Bisher habe ich meine Cablecam mit einem Zugseil und einer Winde mit Federkraftbremse verwendet. Nun brauche ich aber für ein Projekt einen Schlitten mit On-Board-Motor. Ich habe einen C80100 Motor von Wild-Technik, den ich dafür verwenden möchte. Ich habe auch einen Mamba Monster Regler der älteren Generation, habe aber gelesen, dass da das Anlaufverhalten nicht so gut sein soll. Deshalb will ich mir noch einen TORO TS 150A ESC bestellen. Ich habe ein wenig im Verlauf dieses Threads gelesen und die Toro-Regler sollen ja auch ohne Sensor ein gutes Anlaufverhalten haben. Später will ich dann den Wild-Motor evtl. durch einen von Alien Power mit Sensor ersetzen.
Es gibt dort einen mechanisch fast identischen Motor: http://alienpowersystem.com/shop/br...nsored-outrunner-brushless-motor-130kv-7000w/ Der hat allerdings ein 5-poliges Sensorkabel während der Toro Regler einen 6-poligen Sensoreingang hat. Kann mir evtl. einer von Euch wegen der Pin-Belegung und dem Steckertyp helfen?
In einem der älteren Postings habe ich diese Standard-Belegung für den 6-poligen Anschluss gefunden:
Pin #1 – black wire, GND (minus)
Pin #2 – orange wire, sensor phase C
Pin #3 – white wire, sensor phase B
Pin #4 – green wire, sensor phase A
Pin #5 – blue wire, motor temperature sensing, 10kOhm NTC
Pin #6 – red wire, sensors feeding, +5.0 V ± 10%.
Aber wie sieht es mit den entsprechenden Ausgängen von dem Align Motor aus?
Ein Motor wie der Ares Pro hätte die passenden Sensor-Ausgänge. Aber ich nehme an, dass ein großer Outrunner Motor wie der C80100 ein besseres Halte-Moment an Steigungen hat, oder?
Vielen Dank und herzliche Grüße
Andreas
www.andreaskielb.de
ich habe bisher noch keine Erfahrung mit On-Board Brushless Motoren. Bisher habe ich meine Cablecam mit einem Zugseil und einer Winde mit Federkraftbremse verwendet. Nun brauche ich aber für ein Projekt einen Schlitten mit On-Board-Motor. Ich habe einen C80100 Motor von Wild-Technik, den ich dafür verwenden möchte. Ich habe auch einen Mamba Monster Regler der älteren Generation, habe aber gelesen, dass da das Anlaufverhalten nicht so gut sein soll. Deshalb will ich mir noch einen TORO TS 150A ESC bestellen. Ich habe ein wenig im Verlauf dieses Threads gelesen und die Toro-Regler sollen ja auch ohne Sensor ein gutes Anlaufverhalten haben. Später will ich dann den Wild-Motor evtl. durch einen von Alien Power mit Sensor ersetzen.
Es gibt dort einen mechanisch fast identischen Motor: http://alienpowersystem.com/shop/br...nsored-outrunner-brushless-motor-130kv-7000w/ Der hat allerdings ein 5-poliges Sensorkabel während der Toro Regler einen 6-poligen Sensoreingang hat. Kann mir evtl. einer von Euch wegen der Pin-Belegung und dem Steckertyp helfen?
In einem der älteren Postings habe ich diese Standard-Belegung für den 6-poligen Anschluss gefunden:
Pin #1 – black wire, GND (minus)
Pin #2 – orange wire, sensor phase C
Pin #3 – white wire, sensor phase B
Pin #4 – green wire, sensor phase A
Pin #5 – blue wire, motor temperature sensing, 10kOhm NTC
Pin #6 – red wire, sensors feeding, +5.0 V ± 10%.
Aber wie sieht es mit den entsprechenden Ausgängen von dem Align Motor aus?
Ein Motor wie der Ares Pro hätte die passenden Sensor-Ausgänge. Aber ich nehme an, dass ein großer Outrunner Motor wie der C80100 ein besseres Halte-Moment an Steigungen hat, oder?
Vielen Dank und herzliche Grüße
Andreas
www.andreaskielb.de
Zuletzt bearbeitet:
Ich habe jetzt mal diesen Motor mit Sensoren bestellt: http://www.hellray.de/shop/#!/eSk8-...3KW-mit-Sensoren/p/66640988/category=15255001
Als ESC habe ich den neuen Mamba Monster X mit Sensor Harness bestellt. Der alte Mamba Monster funktioniert mit dem C80100 schon mal recht gut, deshalb nahm ich an, dass auch der neue mit Outrunnern gut zurecht kommt. Das Anfahrverhalten des C80100 fand ich mit der neusten Firmware am besten, es war aber sensorless immer einiges an Cogging beim Anfahren. Ich hoffe wenn jetzt noch die Sensoren dazukommen, dass es nochmal besser wird. Leider hat der Mamba Monster kein Initial Brake. Selbst mit dem größten Drag Brake Setting würde er am Berg zwar gedämpft und abgebremst hinunter fahren aber nicht komplett gehalten werden.
Deshalb überlege ich mir noch, zum Test einen TORO TS 150A ESC zu kaufen. Wie reagiert das Initial Brake denn dort? Funktioniert es quasi wie eine Handbremse und kann den Schlitten in einer Steigung halten oder macht es den Motor auch nur etwas schwergängiger (ähnlich dem Drag Brake)? Dann müsste man in beiden Fällen mit der Trimmung der Fernsteuerung gegen die Steigung leicht Gas zu geben. Ginge das auch oder werden Motor und Regler dann zu heiß?
Etwas abgeschreckt hat mich am TS 150, dass der von den Motor-Limits her auf Inrunner ausgelegt zu sein scheint (bei 2-6S Lipo, KV≤2400, 2-4Poles). Hat jemand von Euch jemand den TS 150 ESC mit Outrunner-Motoren probiert?
Als ESC habe ich den neuen Mamba Monster X mit Sensor Harness bestellt. Der alte Mamba Monster funktioniert mit dem C80100 schon mal recht gut, deshalb nahm ich an, dass auch der neue mit Outrunnern gut zurecht kommt. Das Anfahrverhalten des C80100 fand ich mit der neusten Firmware am besten, es war aber sensorless immer einiges an Cogging beim Anfahren. Ich hoffe wenn jetzt noch die Sensoren dazukommen, dass es nochmal besser wird. Leider hat der Mamba Monster kein Initial Brake. Selbst mit dem größten Drag Brake Setting würde er am Berg zwar gedämpft und abgebremst hinunter fahren aber nicht komplett gehalten werden.
Deshalb überlege ich mir noch, zum Test einen TORO TS 150A ESC zu kaufen. Wie reagiert das Initial Brake denn dort? Funktioniert es quasi wie eine Handbremse und kann den Schlitten in einer Steigung halten oder macht es den Motor auch nur etwas schwergängiger (ähnlich dem Drag Brake)? Dann müsste man in beiden Fällen mit der Trimmung der Fernsteuerung gegen die Steigung leicht Gas zu geben. Ginge das auch oder werden Motor und Regler dann zu heiß?
Etwas abgeschreckt hat mich am TS 150, dass der von den Motor-Limits her auf Inrunner ausgelegt zu sein scheint (bei 2-6S Lipo, KV≤2400, 2-4Poles). Hat jemand von Euch jemand den TS 150 ESC mit Outrunner-Motoren probiert?
Zuletzt bearbeitet:

Bezüglich Initial-Brake: Ich kenne das nur als Drag-Brake artig. Die Cablecam wird also nie deswegen an der gleichen Stelle stehen bleiben. Leider.
Die Logik bei der Drag-Brake ist wie viel Energie aus der Bewegung zurück in die Akkus gespeist wird, wenn der Stick auf Neutral steht. Ohne Drag-Brake wäre die Antwort 0%, der Motor funktioniert nicht als Generator.
Bei der Initial Brake geht es nicht um Energierückgewinnung, sondern wie viel Energie gegen die Laufrichtung gerichtet werden soll. Der Motor dreht sich da sowieso nur sehr langsam, eine Energierückgewinnung kann da nicht stattfinden. Also muss ein Magnetfeld elektrisch aufgebaut werden, das sich gegen die Bewegung richtet. Bei Null-Bewegung ist das kein Magnetfeld.
Ich hätte ebenfalls gerne dass der Motor das Magnetfeld auch statisch hält, und das mit einer Stärke, die den Motor einfach blockiert. Das habe ich aber bis jetzt noch nicht gesehen.
Die Logik bei der Drag-Brake ist wie viel Energie aus der Bewegung zurück in die Akkus gespeist wird, wenn der Stick auf Neutral steht. Ohne Drag-Brake wäre die Antwort 0%, der Motor funktioniert nicht als Generator.
Bei der Initial Brake geht es nicht um Energierückgewinnung, sondern wie viel Energie gegen die Laufrichtung gerichtet werden soll. Der Motor dreht sich da sowieso nur sehr langsam, eine Energierückgewinnung kann da nicht stattfinden. Also muss ein Magnetfeld elektrisch aufgebaut werden, das sich gegen die Bewegung richtet. Bei Null-Bewegung ist das kein Magnetfeld.
Ich hätte ebenfalls gerne dass der Motor das Magnetfeld auch statisch hält, und das mit einer Stärke, die den Motor einfach blockiert. Das habe ich aber bis jetzt noch nicht gesehen.
Ich bin gerade am Fertigstellen einer neuen Version vom CableCam Controller.
Von der Funktionsweise her hat sich nichts geändert, nur die Hardware ist jetzt ein STM32F4. Das hat den wesentlichen Vorteil dass man per USB flashen kann und die Zähler sind ebenfalls jetzt 32Bit.
Als Hardware geht jede CC3D Revolution, allerdings macht der RFLink davon keinen Sinn. Daher verwende ich einen Clone davon, der zu einem drittel des Preises zu haben ist, z.B. hier:
https://www.unique-copter.de/flight...-flight-controller-mpu6000-stm32f405/a-10297/
Sourcecode, Binaries, Dokumentation ist alles hier zu find:
https://github.com/wernerdaehn/CC3D-CableCam-Controller
Der Modus 0 - Positional, bei dem die CableCam selbst per PID Loop die Zielposition anfährt, ist zwar noch vorhanden, aber nicht getestet. Möglicherweise werde ich den Modus ausbauen, weil die Genauigkeit bei weitem nicht ausreicht die CableCam sauber zu steuern. Also den bitte nicht, oder nur mit größter Vorsicht, verwenden.
Bezüglich ESC verwende ich nach wie vor meine TS120 und TS160, allerdings macht ein Closed Loop Controller wesentlich mehr Sinn. Also einer der die Stick Position als Ziel-Geschwindigkeit versteht.
Ich schiele da auf die neue Version der VESC, allerdings ist sie mir mit 350EUR zu teuer.
http://www.trampaboards.com/vesc-6-...d-controller-trampa-exclusive-x1-p-23866.html
Ein neues Hallsensorboard für das Laufrad ist von Photokopter in Arbeit - bei Interesse bitte bei mir/uns melden. Das alte Board geht aber auch mit der neuen Hardware.
Von der Funktionsweise her hat sich nichts geändert, nur die Hardware ist jetzt ein STM32F4. Das hat den wesentlichen Vorteil dass man per USB flashen kann und die Zähler sind ebenfalls jetzt 32Bit.
Als Hardware geht jede CC3D Revolution, allerdings macht der RFLink davon keinen Sinn. Daher verwende ich einen Clone davon, der zu einem drittel des Preises zu haben ist, z.B. hier:
https://www.unique-copter.de/flight...-flight-controller-mpu6000-stm32f405/a-10297/
Sourcecode, Binaries, Dokumentation ist alles hier zu find:
https://github.com/wernerdaehn/CC3D-CableCam-Controller
Der Modus 0 - Positional, bei dem die CableCam selbst per PID Loop die Zielposition anfährt, ist zwar noch vorhanden, aber nicht getestet. Möglicherweise werde ich den Modus ausbauen, weil die Genauigkeit bei weitem nicht ausreicht die CableCam sauber zu steuern. Also den bitte nicht, oder nur mit größter Vorsicht, verwenden.
Bezüglich ESC verwende ich nach wie vor meine TS120 und TS160, allerdings macht ein Closed Loop Controller wesentlich mehr Sinn. Also einer der die Stick Position als Ziel-Geschwindigkeit versteht.
Ich schiele da auf die neue Version der VESC, allerdings ist sie mir mit 350EUR zu teuer.
http://www.trampaboards.com/vesc-6-...d-controller-trampa-exclusive-x1-p-23866.html
Ein neues Hallsensorboard für das Laufrad ist von Photokopter in Arbeit - bei Interesse bitte bei mir/uns melden. Das alte Board geht aber auch mit der neuen Hardware.
Und was sagst Du zum Brushed Motor? Ich mag die ja nicht, weil
* zu schwer bei gleicher Leistung
* ESC für >1kW Motoren zu teuer
Nur stimmen die Argumente auch?
Ansonsten müsste der Controller auch mit Brushed ESC umgehen können, wüsste nicht warum das nicht gehen soll.
Ich will jetzt nur wirklich eine Closed Loop ESC ausprobieren. Nur welche???
* zu schwer bei gleicher Leistung
* ESC für >1kW Motoren zu teuer
Nur stimmen die Argumente auch?
Ansonsten müsste der Controller auch mit Brushed ESC umgehen können, wüsste nicht warum das nicht gehen soll.
Ich will jetzt nur wirklich eine Closed Loop ESC ausprobieren. Nur welche???


Also... eins vorweg, mein Setup ist glaub ich weit entfernt vom Optimum (und ich stimme dir auch in deinen beiden Punkten zu).
Cablecam zu klein für die gesamte Payload, Gimbal zu schwach/klein für die zu schwere Kamera...
Ich habe mir Quasi ein "Worst Case-Zenario" gebaut. XD
Das ganze Teil wiegt pi-mal-Daumen 3kg und wird von einem regelrecht kleinen DMiotech R550 mit Getriebe angetrieben. Ursprünglich war das nur als Test verbaut aber ich bin echt zufrieden so wie sie fährt!
Das Getriebe sollte allerdings einer Riemenuntersetzung weichen weil sonst zu laut. Ich erreiche mit meinem Setup etwa 5m/s, was für aktuelle Aufnahmen ausreichend ist.
Aber gerade die Langsamfahrten sind Butterweich, ich hatte vorher einen Alienpower Motor ( http://alienpowersystem.com/shop/br...nsored-outrunner-brushless-motor-220kv-2200w/ ) im Direktantrieb und dadurch immer ein gewisses Ruckeln dabei. Den hätte man auch untersetzen können, aber ne Bürste mit Vorsatzgetriebe war einfacher. (und billiger)
Zum Thema Closed Loop, ich habe da auch ewig gesucht, allerdings hab ich keine Systeme gefunden die zu den Anforderungen passen. Am Interessantesten im Bürstenbereich fand ich dieses: https://www.open-electronics.org/tarocco-open-source-closed-loop-motor-controller/ Ist aber eigendlich für cnc gedacht und man müsste den Input anpassen (was ich nicht kann aufgrund meiner grausigen Softwarekenntnis). Grüße, Jörg
Cablecam zu klein für die gesamte Payload, Gimbal zu schwach/klein für die zu schwere Kamera...
Ich habe mir Quasi ein "Worst Case-Zenario" gebaut. XD
Das ganze Teil wiegt pi-mal-Daumen 3kg und wird von einem regelrecht kleinen DMiotech R550 mit Getriebe angetrieben. Ursprünglich war das nur als Test verbaut aber ich bin echt zufrieden so wie sie fährt!
Das Getriebe sollte allerdings einer Riemenuntersetzung weichen weil sonst zu laut. Ich erreiche mit meinem Setup etwa 5m/s, was für aktuelle Aufnahmen ausreichend ist.
Aber gerade die Langsamfahrten sind Butterweich, ich hatte vorher einen Alienpower Motor ( http://alienpowersystem.com/shop/br...nsored-outrunner-brushless-motor-220kv-2200w/ ) im Direktantrieb und dadurch immer ein gewisses Ruckeln dabei. Den hätte man auch untersetzen können, aber ne Bürste mit Vorsatzgetriebe war einfacher. (und billiger)
Zum Thema Closed Loop, ich habe da auch ewig gesucht, allerdings hab ich keine Systeme gefunden die zu den Anforderungen passen. Am Interessantesten im Bürstenbereich fand ich dieses: https://www.open-electronics.org/tarocco-open-source-closed-loop-motor-controller/ Ist aber eigendlich für cnc gedacht und man müsste den Input anpassen (was ich nicht kann aufgrund meiner grausigen Softwarekenntnis). Grüße, Jörg
CableCam Transportkoffer
Ich habe mir gerade einen Transportkoffer für meine DSLR CableCam besorgt. Hab' lange danach gesucht und möchte euch diesen Aufwand ggfs. ersparen.

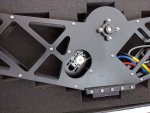


Der Koffer kommt mit zwei Schichten Würfelschaum und kann so sehr gut an die CableCam angepasst werden. In der unteren Schicht habe ich nur die Aussparung für den Motor und den Gimbal Mount rein gemacht, in der oberen Schicht den CableCam Frame.
Der Koffer ist breit und tief genug, sodass die CableCam auch mit dem LRP Dynamic 8 Motor hinein passt, und ist extrem stabil und bezahlbar (99EUR aktuell).
An sonstigem Zubehör wird nicht viel zusätzlich rein gehen, Fernsteuerung, Seilrolle, Gimbal muss extra bleiben. Andererseits ist das sowieso unrealistisch alles in einem Koffer zu haben und noch schleppen zu können.
Innenmaße sind 1125 x 345 x 135 mm und das geht sich exakt aus.
http://www.ebay.de/itm/ALUTEC-Harts...t-Schaumstoff-Rollen-Griff-IP67-/253107191119
https://www.ebay.de/sch/i.html?_odk...ffer+Transportkoffer+mit+Schaumstoff&_sacat=0
Ich habe mir gerade einen Transportkoffer für meine DSLR CableCam besorgt. Hab' lange danach gesucht und möchte euch diesen Aufwand ggfs. ersparen.
Der Koffer kommt mit zwei Schichten Würfelschaum und kann so sehr gut an die CableCam angepasst werden. In der unteren Schicht habe ich nur die Aussparung für den Motor und den Gimbal Mount rein gemacht, in der oberen Schicht den CableCam Frame.
Der Koffer ist breit und tief genug, sodass die CableCam auch mit dem LRP Dynamic 8 Motor hinein passt, und ist extrem stabil und bezahlbar (99EUR aktuell).
An sonstigem Zubehör wird nicht viel zusätzlich rein gehen, Fernsteuerung, Seilrolle, Gimbal muss extra bleiben. Andererseits ist das sowieso unrealistisch alles in einem Koffer zu haben und noch schleppen zu können.
Innenmaße sind 1125 x 345 x 135 mm und das geht sich exakt aus.
http://www.ebay.de/itm/ALUTEC-Harts...t-Schaumstoff-Rollen-Griff-IP67-/253107191119
https://www.ebay.de/sch/i.html?_odk...ffer+Transportkoffer+mit+Schaumstoff&_sacat=0
hab grad bei hk gesehen, die scheinen ne vedder-esc kopie anzubieten!? https://hobbyking.com/en_us/turnigy-skateboard-esc.html

