Hallo, wie im Hauptthema bereits angesprochen habe ich nun endlich auch einen (bisher) funktionierenden AQ. Ich habe die erste statische Kalibrierung versucht, und ich finde, dass es auch schon ganz passabel aussieht. Jedoch habe ich am Anfang bei niedrigen Temperaturen kleine oszillationen auf dem Acc... sehen ähnlich wie hier aus. Kann mir jemand sagen wo die herkommen? Eine antistatische Tüte habe ich nicht verwendet...

Ein weiterer AQ im Aufbau
- Themenstarter phynix
- Beginndatum


Vielen Dank schon einmal für die schnellen Antworten. Habe in jetzt quasi komplett mit Schaum umgeben - dadurch wird er noch etwas wärmer und die Oszillationen sind etwas weniger geworden. Ganz weg bekomme ich sie aber leider nicht ... naja, sollte soweit passen oder?
Sobald er die beiden nächsten Eiszeiten hinter sich hat werde ich die Logs hier noch einmal posten damit ihr einen kurzen Blick drauf werfen könnt! Ansonsten zeigt er in der GGC bereits brav seine live Telemetrie an - incl. der Signale von meiner Hott Funke. Es geht endlich vorran *freu".
Gruß Sören
Sobald er die beiden nächsten Eiszeiten hinter sich hat werde ich die Logs hier noch einmal posten damit ihr einen kurzen Blick drauf werfen könnt! Ansonsten zeigt er in der GGC bereits brav seine live Telemetrie an - incl. der Signale von meiner Hott Funke. Es geht endlich vorran *freu".
Gruß Sören
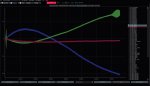
So, habe mal alle drei Orientierungen durch, leider bekomme ich auf dem Y-Gyroskop reproduzierbar Stellen mit einem großen Rauschen drauf rein - der Mittelwert folgt aber wohl weiter der "schönen" Kurve. Unten mal der Screenshot ... was haltet ihr davon? Weitermachen, oder nicht? alle anderen Kurven sehen abgesehen von den Oszillationen im Acc eigentlich schön aus ...

Zuletzt bearbeitet:
Ok, hier mal die Plots mit der Lagerung auf einer Ecke:



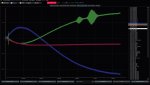
Die von auf der andern Ecke:



Und die wenn er flach liegt:
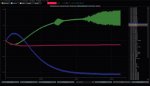



Zum teil ich habe ich etwas lange geloggt, aber dass kann ich ja einfach wegtrimmen. Weiterhin habe ich am Anfang auf dem Acc immer Oszillationen die ich nicht wegbekomme und auf dem Y-Gyro Stellenweise hässliches Rauschen... Irgendwelche Ideen? Oder wird bei den Berechnungen irgendwie etwas wie ein gleitender Durchschnitt verwendet, bei dem das Rauschen quasi rausgemittelt wird?
Sören
Die von auf der andern Ecke:
Und die wenn er flach liegt:
Zum teil ich habe ich etwas lange geloggt, aber dass kann ich ja einfach wegtrimmen. Weiterhin habe ich am Anfang auf dem Acc immer Oszillationen die ich nicht wegbekomme und auf dem Y-Gyro Stellenweise hässliches Rauschen... Irgendwelche Ideen? Oder wird bei den Berechnungen irgendwie etwas wie ein gleitender Durchschnitt verwendet, bei dem das Rauschen quasi rausgemittelt wird?
Sören
So, ich habe die unschönen Anteile mal einfach abgeschnitten, und komme dann auf einen TEMP0 Bereich von -15 - +52°C. Ich hoffe, dass das zunächst ausreicht. Momentan läuft der letzte Schritt der Berechnungen. Der MAE Wert hat sich bei den Steps 4-5 insgesammt recht schnell nicht mehr nennenswert verändert. Was habt ihr denn da für Werte?
Gruß Sören
ps. GPS-Fix und Blutooth scheinen einwandfrei zu funktionieren, fein fein ...
Gruß Sören
ps. GPS-Fix und Blutooth scheinen einwandfrei zu funktionieren, fein fein ...
Noch ein Update, und neue Fragen: Calcs scheinen soweit fertig, werde sie nebenher mal noch etwas weiterlaufen lassen. Nun habe ich alles mal zusammengesteckt, und ein paar Dinge sind mir noch nicht ganz klar.
Ich habe eine Graupner Hott MX20 (PPM). Die Servoeinstellungen habe ich so angepasst, dass mir in der GC Werte von ca. +/- 700 bzw. (0-1400 für Throttle) angezeigt werden. Roll und Yaw musste ich invertieren. Soweit so gut.
Wenn ich nun aber den Pitch Knüppel nach vorne bewege (und dabei in der QC der angezeigte Wert steigt) dann laufen bei mir die vorderen Motoren schneller ... also auch invertieren?? Dann wäre aber die Anzeige in der QC verwirrend, oder? Wenn ich ihn nach vorne neige, laufen die vorderen Motoren schneller. Die Mischertabelle sollte also passen denke ich.
Weiterhin stellt sich mir die Frage, auf welche Werte ich die ESC (Flyduino 20A) kalibrieren soll. Ich habe die jetzt (wie bei der Multiwii) mit den angepassten Servowegen der Fernsteuerung einzeln kalibriert. Wenn ich den AQ nun arme, laufen die Motoren erst an, wenn ich etwas Gas gebe. Wie von Nachbrenner in seinem Build-Log beschrieben, habe ich dann den Motor/esc Min wert in der QC etwas erhöht, mit dem Ergebniss, dass die Motoren nicht mehr ausgehen, wenn ich disarme ?!? Also, für was genau stehen die Werte Motor/esc Start?
Naja, ansonsten bekomme ich das Blutooth modul nur mit meinem Androiden zum laufen, nicht aber mit meinem Laptop ... aber das ist erstmal nicht soooo wichtig.
Wer kann helfen? Sind ja glaub alles keine unlösbaren Probleme") - vielen Dank schon einmal.
- vielen Dank schon einmal.
Ich habe eine Graupner Hott MX20 (PPM). Die Servoeinstellungen habe ich so angepasst, dass mir in der GC Werte von ca. +/- 700 bzw. (0-1400 für Throttle) angezeigt werden. Roll und Yaw musste ich invertieren. Soweit so gut.
Wenn ich nun aber den Pitch Knüppel nach vorne bewege (und dabei in der QC der angezeigte Wert steigt) dann laufen bei mir die vorderen Motoren schneller ... also auch invertieren?? Dann wäre aber die Anzeige in der QC verwirrend, oder? Wenn ich ihn nach vorne neige, laufen die vorderen Motoren schneller. Die Mischertabelle sollte also passen denke ich.
Weiterhin stellt sich mir die Frage, auf welche Werte ich die ESC (Flyduino 20A) kalibrieren soll. Ich habe die jetzt (wie bei der Multiwii) mit den angepassten Servowegen der Fernsteuerung einzeln kalibriert. Wenn ich den AQ nun arme, laufen die Motoren erst an, wenn ich etwas Gas gebe. Wie von Nachbrenner in seinem Build-Log beschrieben, habe ich dann den Motor/esc Min wert in der QC etwas erhöht, mit dem Ergebniss, dass die Motoren nicht mehr ausgehen, wenn ich disarme ?!? Also, für was genau stehen die Werte Motor/esc Start?
Naja, ansonsten bekomme ich das Blutooth modul nur mit meinem Androiden zum laufen, nicht aber mit meinem Laptop ... aber das ist erstmal nicht soooo wichtig.
Wer kann helfen? Sind ja glaub alles keine unlösbaren Probleme
- vielen Dank schon einmal.
Weiterhin stellt sich mir die Frage, auf welche Werte ich die ESC (Flyduino 20A) kalibrieren soll. Ich habe die jetzt (wie bei der Multiwii) mit den angepassten Servowegen der Fernsteuerung einzeln kalibriert. Wenn ich den AQ nun arme, laufen die Motoren erst an, wenn ich etwas Gas gebe.
Hmmm -ich konnte ich es nicht lassen, und musste ihn umbedingt noch in der Wohnung ausprobieren (ja, keine gute Idee, ich weiß). Fazit: also die Nanowii war leichter zu kotrollieren! Ich setze da mal auf die PID-Werte und bin für Input dankbar.
Und dann bin ich an den Schalter für PH gekommen - DAS war nicht nur keine gute, sondern eine eher besch.... Idee. Copter mit max speed an die Zimmerdecke. Vorläufiges Fazit: minus vier Propeller. Nun gut, ich dachte, dass der AQ ohne GPS einfach nur das Barometer nutzt, scheint nicht so zu sein.
Und dann bin ich an den Schalter für PH gekommen
- DAS war nicht nur keine gute, sondern eine eher besch.... Idee. Copter mit max speed an die Zimmerdecke. Vorläufiges Fazit: minus vier Propeller. Nun gut, ich dachte, dass der AQ ohne GPS einfach nur das Barometer nutzt, scheint nicht so zu sein.
Zuletzt bearbeitet:
Kann schon sein, war wie gesagt erster kurzer Testflug. Flog ja auch zunächst ganz passabel, nur gefühlt sehr träge. Das Leveln wenn ich die Knüppel in Mittenstellung bringe ist nett... schöner als bei der Multiwii
Was genau meinst du mit etwas grundsätzlich falsch? In der Wohnung einen Erstflug wagen, ok. Das war wie gesagt nicht die beste Idee. Vorher hatte ich in auf dem Boden fixiert und die Reaktionen überprüpft, dann PH aktiviert, da schien alles normal zu laufen. Auch die Messwerte der Sensoren passen in der live-Telemetrie so weit ich das beurteilen kann.
Noch bin ich guter Dinge, dass ich die Kiste recht zügig zu einem stabilen Flug überreden kann, mit ein bischen Hilfe!
Was genau meinst du mit etwas grundsätzlich falsch? In der Wohnung einen Erstflug wagen, ok. Das war wie gesagt nicht die beste Idee
. Vorher hatte ich in auf dem Boden fixiert und die Reaktionen überprüpft, dann PH aktiviert, da schien alles normal zu laufen. Auch die Messwerte der Sensoren passen in der live-Telemetrie so weit ich das beurteilen kann.Noch bin ich guter Dinge, dass ich die Kiste recht zügig zu einem stabilen Flug überreden kann, mit ein bischen Hilfe
!
Zuletzt bearbeitet:
Omg, jetzt hat mir dieses Forum gerade einen ausführlichen Bericht vom "echten" Erstflug geschluckt *grummel*. Naja, noch mal in Kurz:
A U C H M E I N E R F L I E G T ! ! !
War gerade noch schnell bevor es dunkel wurde einen Akku leerfliegen. Diesmal draußen .Japp, er fliegt auf Anhieb mit Defaulteinstellungen, bei leicht böigem Wind und ungewuchteten Billigprops (die gewuchteten hatts mir ja gestern zerlegt und ich hatte keine Zeit "mal eben" noch neue zu wuchten).
Ein seeehr gutes Gefühl das Ding in der Luft zu sehen. Warum er mir gestern in der Wohnung an die Decke geschossen ist weiß ich nicht... heute hat PH (mit GPS-lock) zumindest teilweise funtioniert. Die Höhe schafft er nicht zu halten, aber er schwebt momentan noch bei weniger als 50% Throttle. Dieses Verhalten wurde im englischen Forum schon beschrieben und wohl auch gelöst.
Auch RTH funktioniert, wenn auch hierbei wieder die Höhe nicht sicher gehalten wird.
Allzu aggressive Flugmanöver habe ich noch nicht probiert - lieber vorher erstmal das allgemeine Zappeln das er noch zeigt loswerden. Ich hoffe mal, dass dies mit Propeller wuchten schon besser werden wird.
Insgesammt glaube ich, dass er meine Erwartungen erfüllen kann !
Das Bluetooth - Modul für die Telemetrie, dass einen echt guten Dienst getan hat, verbindet plötzlich nicht mehr und meldet sich nicht mehr als "Flyduino" sondern als "Bolutek". Ich gehe mal davon aus dass es einfach seine Konfiguration irgendwie verloren hat. Jemand eine Ahnung wie man das wieder drauf bekommt?
Ich habe mal die gopro nebendrann gelegt, was anderes hatte ich nicht da. Ist aber eher ein schlechtes Video geworden was sich nicht mit dem Standard hier messen kann... Falls interesse besteht lade ich es natürlich trotzdem gerne hoch.
A U C H M E I N E R F L I E G T ! ! !
War gerade noch schnell bevor es dunkel wurde einen Akku leerfliegen. Diesmal draußen
.Japp, er fliegt auf Anhieb mit Defaulteinstellungen, bei leicht böigem Wind und ungewuchteten Billigprops (die gewuchteten hatts mir ja gestern zerlegt und ich hatte keine Zeit "mal eben" noch neue zu wuchten). Ein seeehr gutes Gefühl das Ding in der Luft zu sehen. Warum er mir gestern in der Wohnung an die Decke geschossen ist weiß ich nicht... heute hat PH (mit GPS-lock) zumindest teilweise funtioniert. Die Höhe schafft er nicht zu halten, aber er schwebt momentan noch bei weniger als 50% Throttle. Dieses Verhalten wurde im englischen Forum schon beschrieben und wohl auch gelöst.
Auch RTH funktioniert, wenn auch hierbei wieder die Höhe nicht sicher gehalten wird.
Allzu aggressive Flugmanöver habe ich noch nicht probiert - lieber vorher erstmal das allgemeine Zappeln das er noch zeigt loswerden. Ich hoffe mal, dass dies mit Propeller wuchten schon besser werden wird.
Insgesammt glaube ich, dass er meine Erwartungen erfüllen kann
!Das Bluetooth - Modul für die Telemetrie, dass einen echt guten Dienst getan hat, verbindet plötzlich nicht mehr und meldet sich nicht mehr als "Flyduino" sondern als "Bolutek". Ich gehe mal davon aus dass es einfach seine Konfiguration irgendwie verloren hat. Jemand eine Ahnung wie man das wieder drauf bekommt?
Ich habe mal die gopro nebendrann gelegt, was anderes hatte ich nicht da. Ist aber eher ein schlechtes Video geworden was sich nicht mit dem Standard hier messen kann... Falls interesse besteht lade ich es natürlich trotzdem gerne hoch.
Zuletzt bearbeitet:
Ja, bei Altitude Hold, sollte der Gas-Stick mittig sein = 700.
Andernfalls, sagst Du ja der Copter soll steigen oder sinken, mit xx m/sec.
Auch bei RTH, wird die eingestellte Altitude nur dann angeflogen, wenn der Stick in Mitte steht.
Um den Copter bei Gas Mittelstellung zum Hovern zu bringen, gibt's den Throttle factor, und das Dead band.
Grunsätzlich gilt, je steifer der Rahmen um so besser für den AQ.
Andernfalls, sagst Du ja der Copter soll steigen oder sinken, mit xx m/sec.
Auch bei RTH, wird die eingestellte Altitude nur dann angeflogen, wenn der Stick in Mitte steht.
Um den Copter bei Gas Mittelstellung zum Hovern zu bringen, gibt's den Throttle factor, und das Dead band.
Grunsätzlich gilt, je steifer der Rahmen um so besser für den AQ.

