
Endlich GPS für Multiwii
- Themenstarter RC FAN
- Beginndatum
kein ding, ich auch nicht siehe Bildformat ") Finde das GPS mittlerweile brauchbar, dank deiner Hilfe. Mit dem Kompass ist echt so eine Sache. Bei mir ist ja das LZ Midi quasi im Copter. Habe nach oben sehr wenig Spiel. Darüber kommt direkt der Akku. Vielleicht ist das der Störfaktor. Nur wie soll ich das abstellen ? Irgend ein Metall unter dem Akku anbringen ? Ach ja fliege übrigends fast mit Standartwerten. Habe vom verstellen eh nicht so den Plan....
Finde das GPS mittlerweile brauchbar, dank deiner Hilfe. Mit dem Kompass ist echt so eine Sache. Bei mir ist ja das LZ Midi quasi im Copter. Habe nach oben sehr wenig Spiel. Darüber kommt direkt der Akku. Vielleicht ist das der Störfaktor. Nur wie soll ich das abstellen ? Irgend ein Metall unter dem Akku anbringen ? Ach ja fliege übrigends fast mit Standartwerten. Habe vom verstellen eh nicht so den Plan....
Finde das GPS mittlerweile brauchbar, dank deiner Hilfe. Mit dem Kompass ist echt so eine Sache. Bei mir ist ja das LZ Midi quasi im Copter. Habe nach oben sehr wenig Spiel. Darüber kommt direkt der Akku. Vielleicht ist das der Störfaktor. Nur wie soll ich das abstellen ? Irgend ein Metall unter dem Akku anbringen ? Ach ja fliege übrigends fast mit Standartwerten. Habe vom verstellen eh nicht so den Plan....
Zuletzt bearbeitet:
@djdeep: Genau solch ein Gieren habe ich auch.
Eine Zeit lang war es besser, nachdem ich die FC höher gesetzt und auf den Stromverteiler mu-Metall aufgebracht hatte. Es war auch nicht vom Akku abhängig.
Jetzt ist es wieder schlechter. RTH und PH funktioniert zwar, aber es wird kritisch, wenn man zu schnell unterwegs ist und dann PH einschaltet. Das hat mal gut geklappt, er hat dann halt ziemlich heftig gesteuert, aber immer gut die Position erreicht. Jetzt dreht er sich weg, wenn er zu stark kippt und schiesst dann neben der Position hinweg. Manchmal klappt es gut, manchmal schlecht.
Wenn ich richtig Throttle gebe und den Copter festhalte, dann reagiert zwar Mag auch, aber nicht viel.
Das spannende: Dieses Verhalten, dass das Mag-Heading sich ändert, das habe ich auch ohne Akku, also bei reiner Stromversorgung per USB, wenn ich den Copter per Hand kippe - auch bei nackter FC. Das hatte ich auch schon bei einer Crius SE, und nun beim AIO.
Ich bin mit mittlerweile fast sicher, dass das eher eine Sache der Mag-Kalibrierung ist und. So viel kann man da ja eigentlich nicht falsch machen, aber scheinbar mache ich genau das falsch. Ich probiere natürlich viel in Innenräumen. Vielleicht ist das bei der Kalibrierung ein Problem. Aber wenn ich die weiteren Versuche am gleichen Ort mache...?
Ich will die Tage mal wieder dran gehen und das Problem gerne bei der Wurzel packen. Aber da braucht man mal mehr Ruhe zu am Abend.
Sensororientierungen habe ich schon herumgetauscht im Code. Wurde immer nur "schlimmer".
Eine Zeit lang war es besser, nachdem ich die FC höher gesetzt und auf den Stromverteiler mu-Metall aufgebracht hatte. Es war auch nicht vom Akku abhängig.
Jetzt ist es wieder schlechter. RTH und PH funktioniert zwar, aber es wird kritisch, wenn man zu schnell unterwegs ist und dann PH einschaltet. Das hat mal gut geklappt, er hat dann halt ziemlich heftig gesteuert, aber immer gut die Position erreicht. Jetzt dreht er sich weg, wenn er zu stark kippt und schiesst dann neben der Position hinweg. Manchmal klappt es gut, manchmal schlecht.
Wenn ich richtig Throttle gebe und den Copter festhalte, dann reagiert zwar Mag auch, aber nicht viel.
Das spannende: Dieses Verhalten, dass das Mag-Heading sich ändert, das habe ich auch ohne Akku, also bei reiner Stromversorgung per USB, wenn ich den Copter per Hand kippe - auch bei nackter FC. Das hatte ich auch schon bei einer Crius SE, und nun beim AIO.
Ich bin mit mittlerweile fast sicher, dass das eher eine Sache der Mag-Kalibrierung ist und. So viel kann man da ja eigentlich nicht falsch machen, aber scheinbar mache ich genau das falsch. Ich probiere natürlich viel in Innenräumen. Vielleicht ist das bei der Kalibrierung ein Problem. Aber wenn ich die weiteren Versuche am gleichen Ort mache...?
Ich will die Tage mal wieder dran gehen und das Problem gerne bei der Wurzel packen. Aber da braucht man mal mehr Ruhe zu am Abend.
Sensororientierungen habe ich schon herumgetauscht im Code. Wurde immer nur "schlimmer".
ja habe mein S3 wirlkich nicht quer gehalten beim Filmen Ach ja habe ausserdem #define GPSlimit 35 im Code des Midi drin stehen. Reicht ja eigentlich auch. Hatte das reingeschrieben um nicht den Copter am Boden zu sehen bei einem Fehlverhalten. Mal sehen ob ich das nochmal wieder rausnehme. Vielleicht bei grösserem Wind. Ja das mit dem Mag ist echt komisch. Habe extra draussen auf dem Feld Mag kalibriert per Stick. Trotzdem giert er weg wenn ich zu viel nick gebe. Fliege jetzt halt ohne mag. Funktioniert viel besser. Und ph dann halt mit mag an. Der Copter muss bei mir für PH auch relativ ruhig stehen bevor ich es an schalte. Ansonsten klappt das auch nicht. Aber na ja, damit kann ich erstmal leben. Ein wenig Copter fliegen sollte man ja auch können. Ich denke, das mit der freiliegenden Platine ist generell so eine Sache. Hatte mal das Naza. Da war alles gut verpackt. Da hatte ich keine Probleme mit dem Kompass etc. Na ja ist auch komplett was anderes. Aber vielleicht ist da ja trotzdem was dran....
Ach ja habe ausserdem #define GPSlimit 35 im Code des Midi drin stehen. Reicht ja eigentlich auch. Hatte das reingeschrieben um nicht den Copter am Boden zu sehen bei einem Fehlverhalten. Mal sehen ob ich das nochmal wieder rausnehme. Vielleicht bei grösserem Wind. Ja das mit dem Mag ist echt komisch. Habe extra draussen auf dem Feld Mag kalibriert per Stick. Trotzdem giert er weg wenn ich zu viel nick gebe. Fliege jetzt halt ohne mag. Funktioniert viel besser. Und ph dann halt mit mag an. Der Copter muss bei mir für PH auch relativ ruhig stehen bevor ich es an schalte. Ansonsten klappt das auch nicht. Aber na ja, damit kann ich erstmal leben. Ein wenig Copter fliegen sollte man ja auch können. Ich denke, das mit der freiliegenden Platine ist generell so eine Sache. Hatte mal das Naza. Da war alles gut verpackt. Da hatte ich keine Probleme mit dem Kompass etc. Na ja ist auch komplett was anderes. Aber vielleicht ist da ja trotzdem was dran....
@djdeep: Das hatte ich auch schon bei einer Crius SE, und nun beim AIO.
......
Sensororientierungen habe ich schon herumgetauscht im Code. Wurde immer nur "schlimmer".
......
Sensororientierungen habe ich schon herumgetauscht im Code. Wurde immer nur "schlimmer".
#334
Und hier meine Lösung
#361
Kontrollier das mal.
Zurück zum GPS:
Mein GPS Modul ist da

@alle: Der Thread ist schon wieder soooo lang.... Wo gibt´s den aktuellen Code vom Roberto?
Viele Grüße
Martinez
Hallo Martinez,
den gibt es hier: http://fpv-community.de/showthread.php?18985-GPS-Code-%C4nderungen&p=252315&viewfull=1#post252315 doch der wird mit diesem Modul nicht funktionieren.
Gruß Wolfgang
den gibt es hier: http://fpv-community.de/showthread.php?18985-GPS-Code-%C4nderungen&p=252315&viewfull=1#post252315 doch der wird mit diesem Modul nicht funktionieren.
Gruß Wolfgang
@martinez: Es gibt im Repository neueren Code, aber noch keine aktuelle neue Version:
http://code.google.com/p/multiwii/source/browse/#svn/trunk/MultiWii_shared%3Fstate%3Dclosed
http://code.google.com/p/multiwii/source/browse/#svn/trunk/MultiWii_shared%3Fstate%3Dclosed
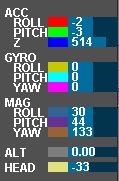
habe gerade in der GUI geguckt. Bei mir ist ACC Z in Ruheposition im positiven Bereich (512).

Habe gerade mal Copter angeschaltet und auf den GUI Kompass geachtet. wenn ich viel Gas gebe, dann bewegt sich der Kompass tatsächlich. Und nicht nur ein wenig sondern bis zu 90 Grad. Dann ist das klar, das er beim fliegen spinnt. Nur was soli ich da machen ? habe schon Kabel ohne Stromverteilerplatine zusammengelötet (was echt fummelig war). Hat aber irgendwie nichts gebracht. Aufgrund der Copter Bauform kann ich die LZ Midi auch nicht verlegen. Kann man den Kompass denn nicht irgendwie auf der Platine selbst abschirmen ? Oder kann man ihn vielleicht weniger empfindlich einstellen ? Man kann ja nicht seinen ganzen Copter auseinanderreissen und im Endeffekt bringt es eh nichts...
Habe gerade mal Copter angeschaltet und auf den GUI Kompass geachtet. wenn ich viel Gas gebe, dann bewegt sich der Kompass tatsächlich. Und nicht nur ein wenig sondern bis zu 90 Grad. Dann ist das klar, das er beim fliegen spinnt. Nur was soli ich da machen ? habe schon Kabel ohne Stromverteilerplatine zusammengelötet (was echt fummelig war). Hat aber irgendwie nichts gebracht. Aufgrund der Copter Bauform kann ich die LZ Midi auch nicht verlegen. Kann man den Kompass denn nicht irgendwie auf der Platine selbst abschirmen ? Oder kann man ihn vielleicht weniger empfindlich einstellen ? Man kann ja nicht seinen ganzen Copter auseinanderreissen und im Endeffekt bringt es eh nichts...
Zuletzt bearbeitet:
habe gerade in der GUI geguckt. Bei mir ist ACC Z in Ruheposition im positiven Bereich (512).
Schau mal dein MAG YAW an, der ist NEGATIV!!!
#361
Wie ich hier geschrieben habe:
Ich wollte schon fast aufgeben, immer wieder habe ich Google mit neuen Suchbegriffen gequält und dann kam diese Seite:
http://www.rudiswiki.de/wiki/QuadrocopterMagnetometer
Da schreibt der "Rudi" doch glatt, das Z positiv sein soll!!! Was sehe ich bei mir! Z ist in Ruhe-Position negativ.
Code geöffnet, Wirkrichtung von Z negiert, UPLOAD, und calibrieren!
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = X; magADC[PITCH] = Y; magADC[YAW] = -Z;}
Es funktioniert!!!! Auch wenn ich mein Quad 45° nach vorn neige bleibt die Kompassnadel auf der aktuellen Richtung. Auch mit Roll keine Änderung der Himmelsrichtung.
Ich bin begeistert!
http://www.rudiswiki.de/wiki/QuadrocopterMagnetometer
Da schreibt der "Rudi" doch glatt, das Z positiv sein soll!!! Was sehe ich bei mir! Z ist in Ruhe-Position negativ.
Code geöffnet, Wirkrichtung von Z negiert, UPLOAD, und calibrieren!
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = X; magADC[PITCH] = Y; magADC[YAW] = -Z;}
Es funktioniert!!!! Auch wenn ich mein Quad 45° nach vorn neige bleibt die Kompassnadel auf der aktuellen Richtung. Auch mit Roll keine Änderung der Himmelsrichtung.
Ich bin begeistert!
Also negiere dein mag YAW!
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = X; magADC[PITCH] = Y; magADC[YAW] = -Z;}
Und berichte
Gruß
Martinez
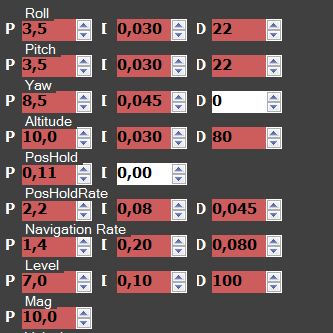
Wenn das wirklich so ein sollte, dann hat Wollez bei seiner Anleitung einen Fehler drin, habe folgendes für die LZ midi eingestellt.
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -X; magADC[PITCH] = -Y; magADC[YAW] = Z;}
Genau wie in seiner Anleitung beschrieben.
Werde das natürlich mal ändern und berichten. Leider erst morgen wenn es nicht regnen sollte. Muss leider vorher erst noch ein bischen Geld verdienen gehen (Nachtschicht).
Bin mal auf Wollez Antwort gespannt. Wär ja ein Ding wenns so einfach wäre...
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -X; magADC[PITCH] = -Y; magADC[YAW] = Z;}
Genau wie in seiner Anleitung beschrieben.
Werde das natürlich mal ändern und berichten. Leider erst morgen wenn es nicht regnen sollte. Muss leider vorher erst noch ein bischen Geld verdienen gehen (Nachtschicht).
Bin mal auf Wollez Antwort gespannt. Wär ja ein Ding wenns so einfach wäre...
Zuletzt bearbeitet:
Hm. Also bei mir stimmen die Orientierungen der Achsen. Alles getestet.
Vielleicht bin ich auch nur zu pingelig.
Aber wenn ich die pure FC am USB Kabel kalibriere, dann ist der Kompass immer noch nicht 100% optimal.
Wenn ich die FC in N-S-Richtung ausrichte und dann über Pitch kippe, ist es sehr gut nur 2-4 Grad Abweichung. Wenn ich sie aber O-W ausrichte, dann ist die Abweichung beim Kippen über Pitch viel höher, mind. 10-15 Grad.
Merkwürdig.
Alles zig Mal kalibriert.
Vielleicht bin ich auch nur zu pingelig.
Aber wenn ich die pure FC am USB Kabel kalibriere, dann ist der Kompass immer noch nicht 100% optimal.
Wenn ich die FC in N-S-Richtung ausrichte und dann über Pitch kippe, ist es sehr gut nur 2-4 Grad Abweichung. Wenn ich sie aber O-W ausrichte, dann ist die Abweichung beim Kippen über Pitch viel höher, mind. 10-15 Grad.
Merkwürdig.
Alles zig Mal kalibriert.
habe gerade in der GUI geguckt. Bei mir ist ACC Z in Ruheposition im positiven Bereich (512).
Habe gerade mal Copter angeschaltet und auf den GUI Kompass geachtet. wenn ich viel Gas gebe, dann bewegt sich der Kompass tatsächlich. Und nicht nur ein wenig sondern bis zu 90 Grad. Dann ist das klar, das er beim fliegen spinnt. Nur was soli ich da machen ? habe schon Kabel ohne Stromverteilerplatine zusammengelötet (was echt fummelig war). Hat aber irgendwie nichts gebracht. Aufgrund der Copter Bauform kann ich die LZ Midi auch nicht verlegen. Kann man den Kompass denn nicht irgendwie auf der Platine selbst abschirmen ? Oder kann man ihn vielleicht weniger empfindlich einstellen ? Man kann ja nicht seinen ganzen Copter auseinanderreissen und im Endeffekt bringt es eh nichts...
Habe gerade mal Copter angeschaltet und auf den GUI Kompass geachtet. wenn ich viel Gas gebe, dann bewegt sich der Kompass tatsächlich. Und nicht nur ein wenig sondern bis zu 90 Grad. Dann ist das klar, das er beim fliegen spinnt. Nur was soli ich da machen ? habe schon Kabel ohne Stromverteilerplatine zusammengelötet (was echt fummelig war). Hat aber irgendwie nichts gebracht. Aufgrund der Copter Bauform kann ich die LZ Midi auch nicht verlegen. Kann man den Kompass denn nicht irgendwie auf der Platine selbst abschirmen ? Oder kann man ihn vielleicht weniger empfindlich einstellen ? Man kann ja nicht seinen ganzen Copter auseinanderreissen und im Endeffekt bringt es eh nichts...
Das hatte ich auch obwohl ich CU-Epoxy unter dem FC hatte.
Jetzt klebt dort ein MuMetall Blech unter dem FC, jetzt sind es nur noch 3-4mm Kompass Nadelbewegungen bei Vollgas.
Zuletzt bearbeitet:

