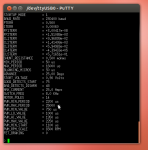
Den Parameter "Max Current" solltest Du auf jeden Fall richtig setzen. Je nach dem, was Du halt bei der CL-Kalibrierung
verwendet hast.
Ich muss den Parameter "Max Current" leider immer überschreiben, damit die Kalibrierung durchläuft.
Wenn ich ein bisschen Zeit habe, werde ich mal ein "pas trough" Option Einbauen.
verwendet hast.
Ich muss den Parameter "Max Current" leider immer überschreiben, damit die Kalibrierung durchläuft.
Wenn ich ein bisschen Zeit habe, werde ich mal ein "pas trough" Option Einbauen.
")