
FPV Dragster
- Themenstarter dexter
- Beginndatum
Danke für den Hinweis.
Ich dachte mir heut auch schon sowas...!?!
Bin heute 6x4,5" am emax geflogen.... hat sich auch ganz schön gequält, fliegt sich aber auch irgendwie "weicher"
Dann werd ich erst die dünneren Plastikprops in 5x4" nehmen und wenn alles passt kann ich ja immernoch GFK nehmen dass er schneller vom Start weg kommt.
-----------------
Hab alle Komponenten eben zusammen geschustert.
Bis auf die Cam bin ich mir mit den Sachen im klaren.
Da ich ja nur gerade aus will, könnte ich ja mit der gopro als Liverview fliegen. Gibt ja keine Ecken oder plötzlich auftauchende hängende Äste.
Die 600tvl hat ca 40ms Latenz , Gopro 120-130ms.
Ob das was ausmacht bei Geradeausflug ca. 5m über dem Boden ?
Ich will ansich vermeiden noch ne FPV-Cam oben drauf zu schnallen.
----------------
Ich hab auch mal visualisiert, dass ich an sich 45° im Geradeuasflug anpeilen sollte.
Ich könnte auch den Motor 50° anstellen und hätte nur noch 40° im Vollgas....aber das ist Theorie, und wo soll das enden.
Bischen realismus soll ja noch dabei sein.
Landen muss ich ja auch noch ohne mir die Propeller in den Boden zu fräsen.
Immerhin fliegt man ja nicht im typischen Vollgas wie beim Auto.
Wenn man beim Quad im 90° Vollgas fliegt, rammt man ihn ja früher oder später in den Boden. Die Spitzengeschwindigkeit finden und halten ist dann ne Wechsel zwischen Gas und Nick..und wenns nur minimal ist....(fiel mir bei meinen bescheidenen Flugkünsten auf.)
Schade das das nicht zu automatisieren ist.
----------------
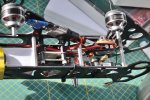
So wie auf den Bildern wiegt der Vogel 698g .
Auf den Bildern steht er auf einem 1cm breiten Etwas. Um den Schwerpunkt vorerst ein wenig zu verdeutlichen.
Liegt momentan am hinteren Rand der FC.
Da ist aber noch keine Cam vorne drauf") Ich vermute der Schwerpunkt wird später passen. Wie gesagt der Rahmen ist ne optische Täuschung. Alle Regler befinden sich (fast) auf einer Seite der FC.
Ich vermute der Schwerpunkt wird später passen. Wie gesagt der Rahmen ist ne optische Täuschung. Alle Regler befinden sich (fast) auf einer Seite der FC.
Vielleicht hat jemand ne Idee das noch optimaler zu gestalten.
Da bin ich offen. Hab ja alles erstmal mit Kabelbindern fixiert.
Ich dachte mir heut auch schon sowas...!?!
Bin heute 6x4,5" am emax geflogen.... hat sich auch ganz schön gequält, fliegt sich aber auch irgendwie "weicher"
Dann werd ich erst die dünneren Plastikprops in 5x4" nehmen und wenn alles passt kann ich ja immernoch GFK nehmen dass er schneller vom Start weg kommt.
-----------------
Hab alle Komponenten eben zusammen geschustert.
Bis auf die Cam bin ich mir mit den Sachen im klaren.
Da ich ja nur gerade aus will, könnte ich ja mit der gopro als Liverview fliegen. Gibt ja keine Ecken oder plötzlich auftauchende hängende Äste.
Die 600tvl hat ca 40ms Latenz , Gopro 120-130ms.
Ob das was ausmacht bei Geradeausflug ca. 5m über dem Boden ?
Ich will ansich vermeiden noch ne FPV-Cam oben drauf zu schnallen.
----------------
Ich hab auch mal visualisiert, dass ich an sich 45° im Geradeuasflug anpeilen sollte.
Ich könnte auch den Motor 50° anstellen und hätte nur noch 40° im Vollgas....aber das ist Theorie, und wo soll das enden.
Bischen realismus soll ja noch dabei sein.
Landen muss ich ja auch noch ohne mir die Propeller in den Boden zu fräsen.
Immerhin fliegt man ja nicht im typischen Vollgas wie beim Auto.
Wenn man beim Quad im 90° Vollgas fliegt, rammt man ihn ja früher oder später in den Boden. Die Spitzengeschwindigkeit finden und halten ist dann ne Wechsel zwischen Gas und Nick..und wenns nur minimal ist....(fiel mir bei meinen bescheidenen Flugkünsten auf.)
Schade das das nicht zu automatisieren ist.
----------------
So wie auf den Bildern wiegt der Vogel 698g .
Auf den Bildern steht er auf einem 1cm breiten Etwas. Um den Schwerpunkt vorerst ein wenig zu verdeutlichen.
Liegt momentan am hinteren Rand der FC.
Da ist aber noch keine Cam vorne drauf
Ich vermute der Schwerpunkt wird später passen. Wie gesagt der Rahmen ist ne optische Täuschung. Alle Regler befinden sich (fast) auf einer Seite der FC. Vielleicht hat jemand ne Idee das noch optimaler zu gestalten.
Da bin ich offen. Hab ja alles erstmal mit Kabelbindern fixiert.
Anhänge
-
 367,3 KB Aufrufe: 34
367,3 KB Aufrufe: 34 -
 331,5 KB Aufrufe: 32
331,5 KB Aufrufe: 32 -
 445,3 KB Aufrufe: 33
445,3 KB Aufrufe: 33
Zuletzt bearbeitet:
Ich hab auch mal visualisiert, dass ich an sich 45° im Geradeuasflug anpeilen sollte.
Ich könnte auch den Motor 50° anstellen und hätte nur noch 40° im Vollgas....aber das ist Theorie, und wo soll das enden.
Bischen realismus soll ja noch dabei sein.
Landen muss ich ja auch noch ohne mir die Propeller in den Boden zu fräsen.
Ich könnte auch den Motor 50° anstellen und hätte nur noch 40° im Vollgas....aber das ist Theorie, und wo soll das enden.
Bischen realismus soll ja noch dabei sein.
Landen muss ich ja auch noch ohne mir die Propeller in den Boden zu fräsen.
Immerhin fliegt man ja nicht im typischen Vollgas wie beim Auto.
Wenn man beim Quad im 90° Vollgas fliegt, rammt man ihn ja früher oder später in den Boden. Die Spitzengeschwindigkeit finden und halten ist dann ne Wechsel zwischen Gas und Nick..und wenns nur minimal ist....(fiel mir bei meinen bescheidenen Flugkünsten auf.)
Schade das das nicht zu automatisieren ist.
Wenn man beim Quad im 90° Vollgas fliegt, rammt man ihn ja früher oder später in den Boden. Die Spitzengeschwindigkeit finden und halten ist dann ne Wechsel zwischen Gas und Nick..und wenns nur minimal ist....(fiel mir bei meinen bescheidenen Flugkünsten auf.)
Schade das das nicht zu automatisieren ist.
Hast du mal bei deinen Versuchen Geschwindigkeiten gemessen? Das kommt einem viel viel schneller vor, als es tatsächlich ist.
Die Motoren will ich genauso wie die FC anstellen.
Ca so: aber steiler
http://store.ivc.no/product/qav250-tilt10
Starten kann man auch von einer Art rampe, dass schon auf dem Boden die Propeller waagerecht sind.
Zur Messung würde ich am liebste mit einer Radarpistole messen oder als 2. Wahl ein kleines GPS von Garmin oder so. Mal schauen was da erschwinglich ist.
Osd mit Gps geht nicht so gut wegen den Störungen denke ich. Deswegen hab ich mein OSD wunsch leider fallen gelassen.
Ca so: aber steiler
http://store.ivc.no/product/qav250-tilt10
Starten kann man auch von einer Art rampe, dass schon auf dem Boden die Propeller waagerecht sind.
Zur Messung würde ich am liebste mit einer Radarpistole messen oder als 2. Wahl ein kleines GPS von Garmin oder so. Mal schauen was da erschwinglich ist.
Osd mit Gps geht nicht so gut wegen den Störungen denke ich. Deswegen hab ich mein OSD wunsch leider fallen gelassen.
wieso hast du dann nicht einfach einen Mini mamba Rahmen gekauft? Der schaut vom Design her deinem sehr ähnlich, hat dazu noch Runde vfk Arme, mit motorhalter die man drehen kann, 360grad.
Oder hast Runde rohre benutzt als Arme oder oder oder.
Ich seh nur Nachteile, sorry, da würd jeder X Frame selbst ohne Winkel irgendwo mit dem selben Setup flotter sein, wenn Quadmovr oder ein anderer beflügelter Pilot fliegt.
Ich verfolge das trotzdem weiter extrem gespannt.
Gruß
Oder hast Runde rohre benutzt als Arme oder oder oder.
Ich seh nur Nachteile, sorry, da würd jeder X Frame selbst ohne Winkel irgendwo mit dem selben Setup flotter sein, wenn Quadmovr oder ein anderer beflügelter Pilot fliegt.
Ich verfolge das trotzdem weiter extrem gespannt.
Gruß
Ja das mit dem Winkel kann ich bestätigen,bei mir sind es ca.82 grad bei Vollgas damit er auf einer Ebene bleibt.Und nein man stürzt nicht irgendwann ab,ich mach das sogar im Stabilisierten Modus.Mit ein bisschen Übung klappt das schon
Allerdings ist das landen jetzt etwas tricky,wegen dem steilen Kamerawinkel.
Das Problem ist wenn mein Nighthawk bei Volldampf mit 3s Akku einschlägt,brech ich mir fast jedesmal einen der Arme ab.Wenn ich auf 4s wechsel,ist mir im Vorfeld klar,bei Absturz=Totalschaden !!!
Möchte mir gar nicht ausmalen,was erst mit einem 6s Akku für ein Klumpen entsteht.
Trotzdem ein Geiles Projekt,mal was anderes
Allerdings ist das landen jetzt etwas tricky,wegen dem steilen Kamerawinkel.
Das Problem ist wenn mein Nighthawk bei Volldampf mit 3s Akku einschlägt,brech ich mir fast jedesmal einen der Arme ab.Wenn ich auf 4s wechsel,ist mir im Vorfeld klar,bei Absturz=Totalschaden !!!
Möchte mir gar nicht ausmalen,was erst mit einem 6s Akku für ein Klumpen entsteht.
Trotzdem ein Geiles Projekt,mal was anderes
@potracer : Ich habe diesen Rahmen und nicht z.b. den Mini mamba gekauft, weil erst der Rahmen da war, ich mich dann davor gehockt hab und überlegt hab was ich draus mache.
Und weil er wie ein Pfeil aussieht dachte ich ..... Der muss schnell werden.
Du sagst wiederholt dass du keine Vorteile siehst.... Ich hatte nicht vor irgendwelche Vorteile aufzuzeigen,..... Ich find er sieht geil aus...mehr nicht. ....Für mein Vorhaben.
Für ein Race unter Büsche und Bäume seh ich da rahmentechnisch schon Vorteile
Wäre erst der Wunsch für ein speedkopter gewesen hätte ich sowas gemacht , wäre aber ne richtige Herausforderung.... Obwohl der in dem video nicht schnell aussieht.
http://youtu.be/Ae5fQybRfiw
@wipeout das abstürzen war auf 90 Grad bezogen.
....du fliegst im stabilisierten Modus?
Ein paar Beiträge vorher hatte ich das verworfen, muss mal schauen warum.
Das wäre ja auch mein Plan gewesen.
Den angle Mode in der cli auf 82 Grad einstellen. Dann mit Rampe starten und 45 Grad in der fc hovern und beim Start voll nicken und sofort mit 82 Grad in der fc und den copter im 37 Grad Winkel nach vorne geflogen
37 Grad anstatt 83 im vorwärtsflug macht schon einiges aus.
Ich schau mal wie sich das bei meinem nighthawk fliegen lässt.
Wenn der bei Volldampf einschlägt, kann ich mich umdrehen und nach Hause gehen.... Da werd ich nicht viel finden zum aufsammeln
Aber ich bin selber gespannt was ich davon realisieren kann.
Bis ich die Motorwinkel habe, werd ich ihn sowieso erstmal normal testen.
4s ohne Winkel ,...ob alles funktioniert.
Werd mich da rantasten
Jetzt erstmal löten gehen..
Und weil er wie ein Pfeil aussieht dachte ich ..... Der muss schnell werden.
Du sagst wiederholt dass du keine Vorteile siehst.... Ich hatte nicht vor irgendwelche Vorteile aufzuzeigen,..... Ich find er sieht geil aus...mehr nicht. ....Für mein Vorhaben.
Für ein Race unter Büsche und Bäume seh ich da rahmentechnisch schon Vorteile
Wäre erst der Wunsch für ein speedkopter gewesen hätte ich sowas gemacht , wäre aber ne richtige Herausforderung.... Obwohl der in dem video nicht schnell aussieht.
http://youtu.be/Ae5fQybRfiw
@wipeout das abstürzen war auf 90 Grad bezogen.
....du fliegst im stabilisierten Modus?
Ein paar Beiträge vorher hatte ich das verworfen, muss mal schauen warum.
Das wäre ja auch mein Plan gewesen.
Den angle Mode in der cli auf 82 Grad einstellen. Dann mit Rampe starten und 45 Grad in der fc hovern und beim Start voll nicken und sofort mit 82 Grad in der fc und den copter im 37 Grad Winkel nach vorne geflogen
37 Grad anstatt 83 im vorwärtsflug macht schon einiges aus.
Ich schau mal wie sich das bei meinem nighthawk fliegen lässt.
Wenn der bei Volldampf einschlägt, kann ich mich umdrehen und nach Hause gehen.... Da werd ich nicht viel finden zum aufsammeln
Aber ich bin selber gespannt was ich davon realisieren kann.
Bis ich die Motorwinkel habe, werd ich ihn sowieso erstmal normal testen.
4s ohne Winkel ,...ob alles funktioniert.
Werd mich da rantasten
Jetzt erstmal löten gehen..
Zuletzt bearbeitet:
kann mich dunkel erinnern..
muss ich mal suchen in der CLI. Danke für den Tip.
Wenn das per Software geht, hab ich eine spätere mögliche Fehlerquelle weniger (Vibration etc.)
Die Regler sind dran, Turm fertig.
Heut werd ich mal versuchen die Motoren zum Leben zu erwecken und die Reglerwege checken.
Ach ja,... externer BEC muss ja noch rein.
muss ich mal suchen in der CLI. Danke für den Tip.
Wenn das per Software geht, hab ich eine spätere mögliche Fehlerquelle weniger (Vibration etc.)
Die Regler sind dran, Turm fertig.
Heut werd ich mal versuchen die Motoren zum Leben zu erwecken und die Reglerwege checken.
Ach ja,... externer BEC muss ja noch rein.
Anhänge
-
 250,4 KB Aufrufe: 33
250,4 KB Aufrufe: 33 -
 203,7 KB Aufrufe: 27
203,7 KB Aufrufe: 27
So,... Hauptfriemeleien geschafft.
-Lipo-Hauptleitung mit PDB verbunden
-Die Escs mit dem PDB verbunden
-Die Escs mit dem Empfänger verbunden
-Empfänger mit der Naze verbunden
-SBEC mit PDB verbunden
-SBEC mit Empfänger verbunden
Dann könnt ich eigentlich als nächstes :
-den Sender einschalten,
-den Copter mit Lipo verbinden
-und den Empfänger binden.
dann
-Die Motordrehrichtung checken und ggf. ändern
-Funke auf Copter einstellen (Model,Servowege,Expo etc..)
-Cleanflight auf Copter (SUMD, Kanalbelegung TEAR1234, Motor disarm etc...)
und dann schweben...
Ich glaub ich hab irgendwas vergessen.
Kann mal jemand checken ob ich ihn in Betrieb nehmen kann?? Einfach ob er "LIPOklar" ist jetzt?
Wäre dankbar!
----------------
Zu den Fotos...
Kann das deren ernst sein,.. mit den kleinen 2 Kabeln vom SBEC die auf dem PDB aufm Bild zu sehen sind.
Miniaturdurchmesser für 6S ?!???!?
Die SBEC sind bis 26V belastbar, da können die doch nicht sonen Seidenfaden rankleben ?!? oder?
Dann werd ich ihn heute mal anschmeissen. Wäre schön von einem Feedback kurz zu hören.
-Lipo-Hauptleitung mit PDB verbunden
-Die Escs mit dem PDB verbunden
-Die Escs mit dem Empfänger verbunden
-Empfänger mit der Naze verbunden
-SBEC mit PDB verbunden
-SBEC mit Empfänger verbunden
Dann könnt ich eigentlich als nächstes :
-den Sender einschalten,
-den Copter mit Lipo verbinden
-und den Empfänger binden.
dann
-Die Motordrehrichtung checken und ggf. ändern
-Funke auf Copter einstellen (Model,Servowege,Expo etc..)
-Cleanflight auf Copter (SUMD, Kanalbelegung TEAR1234, Motor disarm etc...)
und dann schweben...
Ich glaub ich hab irgendwas vergessen.
Kann mal jemand checken ob ich ihn in Betrieb nehmen kann?? Einfach ob er "LIPOklar" ist jetzt?
Wäre dankbar!
----------------
Zu den Fotos...
Kann das deren ernst sein,.. mit den kleinen 2 Kabeln vom SBEC die auf dem PDB aufm Bild zu sehen sind.
Miniaturdurchmesser für 6S ?!???!?
Die SBEC sind bis 26V belastbar, da können die doch nicht sonen Seidenfaden rankleben ?!? oder?
Dann werd ich ihn heute mal anschmeissen. Wäre schön von einem Feedback kurz zu hören.
Anhänge
-
 192,8 KB Aufrufe: 22
192,8 KB Aufrufe: 22 -
 229,7 KB Aufrufe: 25
229,7 KB Aufrufe: 25 -
 198,1 KB Aufrufe: 24
198,1 KB Aufrufe: 24 -
 282,8 KB Aufrufe: 30
282,8 KB Aufrufe: 30 -
 166,3 KB Aufrufe: 23
166,3 KB Aufrufe: 23
Zuletzt bearbeitet:
Eine Sache macht mir noch gedanken.
Die Optos brauchen ja einen externen BEC. Der esc hat aber eine rote Ader die in die Naze gehen. Der BEC ist aber auch mit der Naze durch den Empfänger am Strom.
Das heisst die Naze bekommt vom Empfänger durchs SUMkabel Strom und durch das rote Kabel der Escs.
Man hat mir gesagt bei den Optoreglern kann man das rote Kabel drann lassen, da es minimalen/Strom hat.
?? Ist das so richtig?
Edit: Die roten Kabel kann man dran lassen,...2 Beiträge habe ich genau zu diesen Reglern gefunden.
......
Und er lebt.
6s ran geklemmt und alles geht in Betrieb wie es soll.
Heute ggf noch die wege anlernen etc.
...
Die Optos brauchen ja einen externen BEC. Der esc hat aber eine rote Ader die in die Naze gehen. Der BEC ist aber auch mit der Naze durch den Empfänger am Strom.
Das heisst die Naze bekommt vom Empfänger durchs SUMkabel Strom und durch das rote Kabel der Escs.
Man hat mir gesagt bei den Optoreglern kann man das rote Kabel drann lassen, da es minimalen/Strom hat.
?? Ist das so richtig?
Edit: Die roten Kabel kann man dran lassen,...2 Beiträge habe ich genau zu diesen Reglern gefunden.
......
Und er lebt.
6s ran geklemmt und alles geht in Betrieb wie es soll.
Heute ggf noch die wege anlernen etc.
...
Zuletzt bearbeitet:
yep,
ich brauche 4 für die motoren, 1 zum armen, 1 zur stromversorgung und 1 für nen 3er Switch.
Das ist einer zu wenig.
Leider kann der GR-12L kein SUMO sondern nur SUMD sonst hätt ich drei weiter kanäle,..deswegen ist der GR-12 auf dem Weg zu mir.
Hab da was bezüglich GR-12L und PIN 4 + Serialports in der Cleanflight gelesen..
wenn da jemand genaues weiss aus Erfahrung kann die Info gern geteilt werden.
ich brauche 4 für die motoren, 1 zum armen, 1 zur stromversorgung und 1 für nen 3er Switch.
Das ist einer zu wenig.
Leider kann der GR-12L kein SUMO sondern nur SUMD sonst hätt ich drei weiter kanäle,..deswegen ist der GR-12 auf dem Weg zu mir.
Hab da was bezüglich GR-12L und PIN 4 + Serialports in der Cleanflight gelesen..
wenn da jemand genaues weiss aus Erfahrung kann die Info gern geteilt werden.
Der GR-12 ist eingebaut und per PPM mit einem Kabel verbunden.
Funktioniert soweit,...auch meine 4 Aux Kanäle hab ich drauf. (arm/3er ModeSwitch/Autotune/frei)
Nuuur,.....die Motoren laufen nicht an.
Hab schon alle Einstellungen verglichen mit dem Setup meines anderen 250er. Mir sind aber keine Unterschiede aufgefallen.
Zustand:
- Armen wird an der FC mit der LED angezeigt
- Einstellen der Modis wird angezeigt
- Wenn gearmt ist und ich das Gas betätige, reagieren die Balken in der Motoranzeige.
- Wege sind von 1000-2000 eingelernt und werden auch angezeigt.
- Min_command: 1050
- Wenn ich die Escwege einlernen will machen die Motoren/Escs keine Geräusche,...auch laufen sie nicht an.
- Alles passt bis auf dass die Motoren laufen.
Ich hatte das gleiche Problem mit der letzten Naze auch.....hatte es nach 3 tagen gelöst weil ich wild rumgestellt habe.
Nachvollziehen kann ich es leider nicht mehr, wie ich es geschafft habe.
Hat jemand eine Idee??
Funktioniert soweit,...auch meine 4 Aux Kanäle hab ich drauf. (arm/3er ModeSwitch/Autotune/frei)
Nuuur,.....die Motoren laufen nicht an.
Hab schon alle Einstellungen verglichen mit dem Setup meines anderen 250er. Mir sind aber keine Unterschiede aufgefallen.
Zustand:
- Armen wird an der FC mit der LED angezeigt
- Einstellen der Modis wird angezeigt
- Wenn gearmt ist und ich das Gas betätige, reagieren die Balken in der Motoranzeige.
- Wege sind von 1000-2000 eingelernt und werden auch angezeigt.
- Min_command: 1050
- Wenn ich die Escwege einlernen will machen die Motoren/Escs keine Geräusche,...auch laufen sie nicht an.
- Alles passt bis auf dass die Motoren laufen.
Ich hatte das gleiche Problem mit der letzten Naze auch.....hatte es nach 3 tagen gelöst weil ich wild rumgestellt habe.
Nachvollziehen kann ich es leider nicht mehr, wie ich es geschafft habe.
Hat jemand eine Idee??
Zuletzt bearbeitet:
Wenn ich motortest machen passiert folgendes:
- fc an cleanflight anstöpseln
- Sender an
- Liporein, motor/regler piept drei mal
- ich mach den haken bei motortest , props ab, motorregler einzeln hochschieben,..passiert nix ausser dass die balken sich füllen.
- wenn ich arme und gas hochdrücke, füllen sich auch die Balken und zappeln wie gewohnt als würden sie anlaufen.
Einzeln anschliessen?:
hab ich noch nie gemacht.
- Reglerstecker einfach an die Eingänge 1-4 des RX ?
- PPM Kabel dran lassen?
- Lipo anstecken und armen, dann gas geben.
Einfach die FC umgehen, sonst alles lassen?..kann man was falsch machen?
Edit: grad gebraint und ich glaub jeden Regler nach und nach an Kanal 3 des RX? Richtig?
Probier ich morgen mal aus.
- fc an cleanflight anstöpseln
- Sender an
- Liporein, motor/regler piept drei mal
- ich mach den haken bei motortest , props ab, motorregler einzeln hochschieben,..passiert nix ausser dass die balken sich füllen.
- wenn ich arme und gas hochdrücke, füllen sich auch die Balken und zappeln wie gewohnt als würden sie anlaufen.
Einzeln anschliessen?:
hab ich noch nie gemacht.
- Reglerstecker einfach an die Eingänge 1-4 des RX ?
- PPM Kabel dran lassen?
- Lipo anstecken und armen, dann gas geben.
Einfach die FC umgehen, sonst alles lassen?..kann man was falsch machen?
Edit: grad gebraint und ich glaub jeden Regler nach und nach an Kanal 3 des RX? Richtig?
Probier ich morgen mal aus.
Zuletzt bearbeitet:
vielleicht falschen kanal zum anlernen benutzt, bei mir ist z.b. kanal 3 throttle. andere frage piepen den die esc wenn du die spannung anschliesst, ansonsten stimmt was mit deinen esc nicht.
mfg
mfg
Die Esc piepen drei mal (frag mich immer wo das piepen herkommt..Motor/esc/Lautsprechen hää
)Angelernt habe ich sie nicht einzeln sondern in der Cleanflight im Motortest...klappte ja sonst auch?
Ggf. minthr/mincomm/maxthr usw...falsch eingestellt?
esc direkt am rx kanal throttle, vollgas geben, dann akku anstecken, regler fangen an mit piepsen -> regler throttle runter abwarten, dies wird mit einem piepton quittiert, dann zum test gas geben und schauen ob die motoren sich drehen aber alles ohne propeller. wenn es geht ist er angelernt. steht auch meistens in den beschreibung mit drinnen.
mfg
mfg

