iNav
- Themenstarter talentfrei
- Beginndatum
Ich denke, der Fehler sitzt bei @Hans-Jürgen Duwe vor dem PC ...
@QuadCrash: kann gut sein.
Ich habe die kompletten Einstellungen von 1.9.3 genommen und im neuen manuell eingetragen.
Nix
Dann die Einstellungen vom neuen ins 1.9.3 kopiert.
Geht....
Mangels Englisch Kenntnissen habe ich es nicht gemeldet.
Das FPORT Problem hab ich auch noch nicht hin bekommen, Neuer RXSR nach vorgaben von Matek angschlossen und im CLI geändert, leider keine Telemetrie...
Ich habe die kompletten Einstellungen von 1.9.3 genommen und im neuen manuell eingetragen.
Nix
Dann die Einstellungen vom neuen ins 1.9.3 kopiert.
Geht....
Mangels Englisch Kenntnissen habe ich es nicht gemeldet.
Das FPORT Problem hab ich auch noch nicht hin bekommen, Neuer RXSR nach vorgaben von Matek angschlossen und im CLI geändert, leider keine Telemetrie...
Zuletzt bearbeitet:
Dank Der INAV Githup Seite :
FPort Problem ebenso behoben.
R-XSR und F405 reden nun miteinander.
Vom Stecker das SBUS Kabel, in dem Falle FPort Kabel, an RX4
Softserial und dort den RX aktivieren.
Fertsch")
Echt komisch das die Anweisung vom Hersteller nicht funzt.
Aber nun ist es egal
Greetz
HJO
FPort Problem ebenso behoben.
R-XSR und F405 reden nun miteinander.
Vom Stecker das SBUS Kabel, in dem Falle FPort Kabel, an RX4
Softserial und dort den RX aktivieren.
Fertsch
Echt komisch das die Anweisung vom Hersteller nicht funzt.
Aber nun ist es egal
Greetz
HJO
Zuletzt bearbeitet:
....
Vom Stecker das SBUS Kabel, in dem Falle FPort Kabel, an RX4
Softserial und dort den RX aktivieren....
Vom Stecker das SBUS Kabel, in dem Falle FPort Kabel, an RX4
Softserial und dort den RX aktivieren....
Liest sich hier fast so, ...wäre nicht wirklich gut, da mit steigender Prozessor Last Soft Serial langsamer wird.
Softserial ist ok für Telemetrie, Kamera Steuerung,
aber bitte nicht für kritische Anschlüße wie GPS und Steuerung nehmen.
Bis zum ersten Flug ... Ich sehe das auch so kritisch wie @fandi.
Zwei kurze Fragen:
(1) ich habe gestern mit iNav 2.0 versucht eine Mission zu starten aber der Copter hat nicht reagiert. GPS Navigation war sicher, POSH und RTH haben problemlos funktioniert. Auf einem Schalter habe ich NAV WP gelegt. Im OSD wurde mir auch keine System Message angezeigt. Im Konfigurator kann ich die Mission aus dem EEPROM laden, wurde also erfolgreich abgespeichert. Was mache ich falsch?!
(2) ich kann keine neuen Missionen ins EEPROM schreiben. Wenn ich eine neue Mission speichere bekomme ich die Meldung dass diese erfolgreich im EEPROM gespeichert wurde. Wenn ich die FC vom Strom trenne und wieder anschließe und aus dem EEPROM lade ist wieder meine allererste Mission drauf. Hat jemand ähnliche Probleme?
(1) ich habe gestern mit iNav 2.0 versucht eine Mission zu starten aber der Copter hat nicht reagiert. GPS Navigation war sicher, POSH und RTH haben problemlos funktioniert. Auf einem Schalter habe ich NAV WP gelegt. Im OSD wurde mir auch keine System Message angezeigt. Im Konfigurator kann ich die Mission aus dem EEPROM laden, wurde also erfolgreich abgespeichert. Was mache ich falsch?!
(2) ich kann keine neuen Missionen ins EEPROM schreiben. Wenn ich eine neue Mission speichere bekomme ich die Meldung dass diese erfolgreich im EEPROM gespeichert wurde. Wenn ich die FC vom Strom trenne und wieder anschließe und aus dem EEPROM lade ist wieder meine allererste Mission drauf. Hat jemand ähnliche Probleme?
Du musst die Mission nicht nur im EEprom speichern, sondern auch im Flash. Also beide Speichermöglichkeiten im Konfigurator nutzen. Dann Strom trennen, wieder anstöpseln und via Stick-Commando aus dem EEprom laden. Dann die Mission ausführen. Dabei aber beachten, dass Du eine gewisse Entfernung zum ersten WP benötigst (lässt sich konfigurieren).
Hi Leute,
habe inzwischen 2 Copter mit INAV gebaut. Den ersten mit 7" 3Blatt, 3s LIPO und 750g Abfluggewicht und diesem FC:
BF3.1.5 Omnibus F4 V2 Flugregler STM32 F405 MCU Integrierter OSD Eingebauter 5V BEC Stromzähler
Den zweiten mit 5x3" 2Blatt, 2s LIPO, 250g Abfluggewicht und diesem FC:
Matek F405-OSD BetaFlight STM32F405 Flugsteuerung Board Eingebauter OSD Wechselrichter Für SBUS Eingang
(Da steht zwar F405-OSD, ist aber der F405-STD!)
Der erste Copter fliegt so weit ganz gut, allerdings hatte ich nun schon 2 mal einen Absturz trotz programmiertem Failsafe (Der Copter sollte dann normalerweise auf RTH gehen). RTH per Schalter und per Sender ausschalten funktioniert gut. Ich habe null Ahnung weshalb der Copter abgeschmiert ist! Ich hatte den Flug per DVR in der Videobrille aufgezeichnet und anhand der GPS Koordinaten auch wiedergefunden. Im Video macht der Copter eine saubere Rolle nach vorne und stürzt dann ab. (kein ausbrechen nach rechts oder links während der Rolle). Dummerweise bin ich im Horizon Mode geflogen und kann daher nicht 100% ig genau sagen, ob ich den Nick-Knüppel nicht etwas zu weit durchgedrückt habe, ich bin aber der Meinung, dass dies nicht der Fall war, da ich bei beiden Abstürzen ziemlich langsam unterwegs war! Nun fliege ich sicherheitshalber nur noch im Angle Mode. Kann es sein, dass sich die CPU im FC "verschluckt" hat? Irgendwie habe ich kein Vertrauen mehr in die China FC's. Wo bekommt man denn einen originalen Omnibus F4 V2?
Zu dem 250g Copter mit Matek F405 STD FC kann ich folgendes berichten:
Es war unvorstellbar schwierig die PID's einzustellen! Die Werte stehen nun ganz niedrig und das Fenster, in dem der Copter einigermaßen vernünftig fliegt ist seeehr klein! Trotzdem wackelt der Copter noch ziemlich stark. Bei RTH z.B. beschleunigt er, bremst ab, beschleunigt, bremst ab, usw... Verändere ich nun P nur um 1 oder 2 Punkte nach oben oder unten, so verschlechtert sich das Flugverhalten drastisch! (Copter schwingt sich auf). Also, entweder ich habe eine Einstellung noch nicht gefunden, die dieses hypersensible Verhalten dämpft, oder der verbaute Gyro ist tatsächlich deutlich schlechter als ein MPU6000. (Der MPU6000 soll wohl für unsere Anwendung im FC am besten geeignet sein).
Mache gleich noch nen dump von dem Matek F405 STD und poste ihn hier. Vieleicht hab ich für dieses Board irgendwas vergessen/übersehen?
Bei Interesse kann ich auch noch nen dump von dem Omnibus F4 Copter machen. Über Hilfe zu dem Matek wäre ich aber aktuell schon einmal sehr glücklich!
BG, Elton
habe inzwischen 2 Copter mit INAV gebaut. Den ersten mit 7" 3Blatt, 3s LIPO und 750g Abfluggewicht und diesem FC:
BF3.1.5 Omnibus F4 V2 Flugregler STM32 F405 MCU Integrierter OSD Eingebauter 5V BEC Stromzähler
Den zweiten mit 5x3" 2Blatt, 2s LIPO, 250g Abfluggewicht und diesem FC:
Matek F405-OSD BetaFlight STM32F405 Flugsteuerung Board Eingebauter OSD Wechselrichter Für SBUS Eingang
(Da steht zwar F405-OSD, ist aber der F405-STD!)
Der erste Copter fliegt so weit ganz gut, allerdings hatte ich nun schon 2 mal einen Absturz trotz programmiertem Failsafe (Der Copter sollte dann normalerweise auf RTH gehen). RTH per Schalter und per Sender ausschalten funktioniert gut. Ich habe null Ahnung weshalb der Copter abgeschmiert ist! Ich hatte den Flug per DVR in der Videobrille aufgezeichnet und anhand der GPS Koordinaten auch wiedergefunden. Im Video macht der Copter eine saubere Rolle nach vorne und stürzt dann ab. (kein ausbrechen nach rechts oder links während der Rolle). Dummerweise bin ich im Horizon Mode geflogen und kann daher nicht 100% ig genau sagen, ob ich den Nick-Knüppel nicht etwas zu weit durchgedrückt habe, ich bin aber der Meinung, dass dies nicht der Fall war, da ich bei beiden Abstürzen ziemlich langsam unterwegs war! Nun fliege ich sicherheitshalber nur noch im Angle Mode. Kann es sein, dass sich die CPU im FC "verschluckt" hat? Irgendwie habe ich kein Vertrauen mehr in die China FC's. Wo bekommt man denn einen originalen Omnibus F4 V2?
Zu dem 250g Copter mit Matek F405 STD FC kann ich folgendes berichten:
Es war unvorstellbar schwierig die PID's einzustellen! Die Werte stehen nun ganz niedrig und das Fenster, in dem der Copter einigermaßen vernünftig fliegt ist seeehr klein! Trotzdem wackelt der Copter noch ziemlich stark. Bei RTH z.B. beschleunigt er, bremst ab, beschleunigt, bremst ab, usw... Verändere ich nun P nur um 1 oder 2 Punkte nach oben oder unten, so verschlechtert sich das Flugverhalten drastisch! (Copter schwingt sich auf). Also, entweder ich habe eine Einstellung noch nicht gefunden, die dieses hypersensible Verhalten dämpft, oder der verbaute Gyro ist tatsächlich deutlich schlechter als ein MPU6000. (Der MPU6000 soll wohl für unsere Anwendung im FC am besten geeignet sein).
Mache gleich noch nen dump von dem Matek F405 STD und poste ihn hier. Vieleicht hab ich für dieses Board irgendwas vergessen/übersehen?
Bei Interesse kann ich auch noch nen dump von dem Omnibus F4 Copter machen. Über Hilfe zu dem Matek wäre ich aber aktuell schon einmal sehr glücklich!
BG, Elton
Zuletzt bearbeitet:
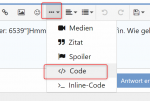
Wie gewünscht als diff. Ist das nun ein code tag? Ich glaub nich. Asche auf mein Haupt...
Diff:
Entering CLI Mode, type 'exit' to return, or 'help'
# diff
# version
# INAV/MATEKF405 1.9.1 Apr 21 2018 / 13:25:29 (03a5c1922)
# resources
# mixer
# servo mix
# servo
# feature
feature -CURRENT_METER
feature MOTOR_STOP
feature GPS
feature PWM_OUTPUT_ENABLE
# beeper
# map
# name
# serial
serial 3 2 115200 57600 0 115200
# led
# color
# mode_color
# aux
aux 0 0 0 1700 2100
aux 1 1 1 900 1225
aux 2 2 1 1300 2100
aux 3 3 3 1300 2100
aux 4 9 2 1300 1700
aux 5 8 2 1700 2100
# adjrange
# rxrange
# master
set gyro_sync = ON
set gyro_hardware_lpf = 188HZ
set gyro_lpf_hz = 120
set gyro_notch1_hz = 200
set gyro_notch1_cutoff = 100
set acc_hardware = MPU6500
set acczero_x = 2
set acczero_y = -46
set acczero_z = -13
set accgain_x = 4091
set accgain_y = 4086
set accgain_z = 4094
set align_mag = CW270FLIP
set mag_hardware = HMC5883
set magzero_x = 247
set magzero_y = -290
set magzero_z = 67
set baro_hardware = BMP280
set pitot_hardware = NONE
set min_throttle = 1050
set max_throttle = 1950
set motor_pwm_rate = 50
set failsafe_delay = 1
set failsafe_procedure = RTH
set vbat_max_cell_voltage = 430
set vbat_min_cell_voltage = 250
set vbat_warning_cell_voltage = 300
set small_angle = 180
set nav_extra_arming_safety = OFF
set nav_auto_speed = 600
set nav_manual_speed = 1000
set nav_landing_speed = 80
set nav_rth_altitude = 3000
set nav_mc_bank_angle = 45
set osd_video_system = 1
set osd_time_alarm = 20
set osd_main_voltage_pos = 2188
set osd_rssi_pos = 2201
set osd_flytimer_pos = 2134
set osd_ontime_pos = 2102
set osd_flymode_pos = 2445
set osd_throttle_pos = 65
set osd_artificial_horizon_pos = 200
set osd_horizon_sidebars_pos = 200
set osd_gps_speed_pos = 2087
set osd_gps_sats_pos = 2094
set osd_gps_lon_pos = 2339
set osd_gps_lat_pos = 2371
set osd_home_dir_pos = 2414
set osd_home_dist_pos = 2081
set osd_altitude_pos = 2145
set osd_ontime_flytime_pos = 375
set osd_messages_pos = 2273
# profile
profile 1
set mc_p_pitch = 11
set mc_i_pitch = 3
set mc_d_pitch = 12
set mc_p_roll = 11
set mc_i_roll = 3
set mc_d_roll = 12
set mc_p_yaw = 65
set mc_i_yaw = 3
set mc_d_yaw = 12
set mc_p_level = 10
set dterm_lpf_hz = 80
set dterm_notch_hz = 200
set dterm_notch_cutoff = 100
set thr_expo = 40
set roll_rate = 24
set pitch_rate = 24
set yaw_rate = 45
#
Zuletzt bearbeitet:
Poste Deinen Dump doch bitte in Code-Tages (kannst Du jetzt noch ändern), dann braucht man nicht ewig scrollen ...
Ein DIFF wäre besser, wir wollen nur die Änderungen gegenüber den Default-Werten haben. Das ist dann deutlich übersichtlicher.
Warum nimmst Du nicht iNav 2.0, aktuellen RC? Da sind durchaus einige Verbesserungen drin.
Ein DIFF wäre besser, wir wollen nur die Änderungen gegenüber den Default-Werten haben. Das ist dann deutlich übersichtlicher.
Warum nimmst Du nicht iNav 2.0, aktuellen RC? Da sind durchaus einige Verbesserungen drin.
Poste Deinen Dump doch bitte in Code-Tages (kannst Du jetzt noch ändern), dann braucht man nicht ewig scrollen ...
Ein DIFF wäre besser, wir wollen nur die Änderungen gegenüber den Default-Werten haben. Das ist dann deutlich übersichtlicher.
Warum nimmst Du nicht iNav 2.0, aktuellen RC? Da sind durchaus einige Verbesserungen drin.
Ein DIFF wäre besser, wir wollen nur die Änderungen gegenüber den Default-Werten haben. Das ist dann deutlich übersichtlicher.
Warum nimmst Du nicht iNav 2.0, aktuellen RC? Da sind durchaus einige Verbesserungen drin.
Mit den neuesten beta Versionen habe ich noch schlechtere Erfahrungen gemacht. Bin deshalb wieder zurück zu altbewährtem!
Noch ein Hinweis: Was mich von Anfang an stutzig gemacht hat, ist, dass ich den laut Matek verbauten 6-axis ICM20602 nicht in INAV auswählen kann! Er entscheidet sich automatisch für, na ja, seht selbst.
BG, Elton
Zuletzt bearbeitet:
@Elton100 :
beschreibe doch mal deinen 250 Gramm Kopter.
Ich habe selber so was gebaut, aber meiner ist sehr schnell ausgelegt.
Hier habe ich P ähnlich wie Du 10 statt deine 11
I deutlich höher 14 statt deine 3
D deutlich niedriger 3 statt deine 12.
(Werte wie im CLI, im Konfigurator sieht es evtl. anders aus!!!)
Tendenziel versuche ich P gerade weiter zu verringern, bin mir aber noch nicht sicher, ob das besser ist.
Mit den Werten fliegt meiner aber schon recht gut.
Wie gesagt: eher schnell mit 1306-4000KV an 4S mit 3045-3Blatt Props.
beschreibe doch mal deinen 250 Gramm Kopter.
Ich habe selber so was gebaut, aber meiner ist sehr schnell ausgelegt.
Hier habe ich P ähnlich wie Du 10 statt deine 11
I deutlich höher 14 statt deine 3
D deutlich niedriger 3 statt deine 12.
(Werte wie im CLI, im Konfigurator sieht es evtl. anders aus!!!)
Tendenziel versuche ich P gerade weiter zu verringern, bin mir aber noch nicht sicher, ob das besser ist.
Mit den Werten fliegt meiner aber schon recht gut.
Wie gesagt: eher schnell mit 1306-4000KV an 4S mit 3045-3Blatt Props.
Hi Andreas,
aaalso, Aufbau als normales X, Kingkong 1306 mit 3100kv, YEP 7A 1-2s Regler, 2s Konion 18650 und 2 Blatt 5x3" Props. Schnell muss er nicht sein, mir kommt es auf die Flugzeit an und die liegt bei 25 min. Das rumgewackel nervt halt und macht die ganze Sache nicht wirklich sicher. Bei etwas mehr Wind (geschätzt ab ca. 10 km/h) flieg ich den momentan gar nicht! Einfach zu unsicher.
Welchen FC hast du denn? Mein 750g Copter mit dem Omnibus F4 war irgendwie deutlich einfacher einzustellen! Ganz so falsch liege ich ja wohl nicht mit den PIDs. Deine sind ja auch recht niedrig. Meinst du, ich kann deine mal ausprobieren, oder passt das für meine Kombination gar nicht?
Oder anders gefragt: Meinst du, es liegt nicht am FC? Ist der Matek F405 STD brauchbar? Hat den jemand mit INAV erfolgreich im Einsatz? Den Bewertungen bei Banggood traue ich nicht mehr so richtig.
BG, Elton
aaalso, Aufbau als normales X, Kingkong 1306 mit 3100kv, YEP 7A 1-2s Regler, 2s Konion 18650 und 2 Blatt 5x3" Props. Schnell muss er nicht sein, mir kommt es auf die Flugzeit an und die liegt bei 25 min. Das rumgewackel nervt halt und macht die ganze Sache nicht wirklich sicher. Bei etwas mehr Wind (geschätzt ab ca. 10 km/h) flieg ich den momentan gar nicht! Einfach zu unsicher.
Welchen FC hast du denn? Mein 750g Copter mit dem Omnibus F4 war irgendwie deutlich einfacher einzustellen! Ganz so falsch liege ich ja wohl nicht mit den PIDs. Deine sind ja auch recht niedrig. Meinst du, ich kann deine mal ausprobieren, oder passt das für meine Kombination gar nicht?
Oder anders gefragt: Meinst du, es liegt nicht am FC? Ist der Matek F405 STD brauchbar? Hat den jemand mit INAV erfolgreich im Einsatz? Den Bewertungen bei Banggood traue ich nicht mehr so richtig.
BG, Elton
Zuletzt bearbeitet: