
QUAD6IN+ Klappkopter X8 --- möchte ich gerne mal zeigen hier---
- Themenstarter biele01
- Beginndatum
So habs getestet...is besser aber immernoch zu weich denke ich. Wo bekomme ich die gummitullen für günstig in hart. Oder kann ich evt. Die gummitulen novhmal mit gieß silikon füllen? Wäre nur ne udee.
Die aus dem orangenen Schaum funktionieren gut.
Die machen die Gummis härter aber sind doch viel weicher und mehr vibrationsdaempfend als Silicon.
Und günstig noch dazu
") -).
-).
Zuletzt bearbeitet:
Nochmals eine Frage zur Motorisierung - der Tiger MN4012-13 ist momentan überall ausverkauft , wahrscheinlich , weil Tiger die Serie aufgefrischt hat. Ähnlich dem MN 4012-13 wäre der MN 4014-11 ( KV330 ). Hat schon jemand mit dem MN 4014-11 Erfahrungen sammeln können oder andere Vorschläge ?
Welche Regler setzt ihr ein ?
@biele01- ich lese gespannt deine Tests zum Gimbal . Nochmals danke für deine gute Arbeit ! Hast du schon einen groben Zeitplan , wann du den Gimbal anbieten wirst ?
Welche Regler setzt ihr ein ?
@biele01- ich lese gespannt deine Tests zum Gimbal . Nochmals danke für deine gute Arbeit ! Hast du schon einen groben Zeitplan , wann du den Gimbal anbieten wirst ?
Ich komme gerade aus Südafrika wieder und hatte bis auf ein paar Hüpfer noch keine Zeit für den ersten Flug. Zeitgleich baue ich auch noch gerade an einem Black Manta als kleinen Reisekopter. Zwei Fragen zum X8 bzw. zum Beitrag von Ferdl unten:
Wie befestigt ihr die Akkus? Bei mir gehen 2 SLS 4S 10000mAh wunderbar in das Batteriefach. Nach hinten durch die Platte gesichert. Nach vorne sehe ich bei Euch keine Sicherung? Mir ist nämlich leider schon ein Quad runtergekommen bei dem auf 100m der Akku rausgefallen ist beim Richtungswechsel (und der war am Boden sehr straff mit Klett gesichert...).
Und: Wie sicherst Du die Pins der Servokabel wie von Dir angesprochen?
Last but not least: Habe jetzt die UltraESC in den Auslegern. Müssen die zwingend eingeschrumpft werden oder mit Plastiklack geschützt werden? Kenne das noch aus alten MK Zeiten, da waren die ESCs ja quasi nackt als Platine integriert.
Grüße
Wie befestigt ihr die Akkus? Bei mir gehen 2 SLS 4S 10000mAh wunderbar in das Batteriefach. Nach hinten durch die Platte gesichert. Nach vorne sehe ich bei Euch keine Sicherung? Mir ist nämlich leider schon ein Quad runtergekommen bei dem auf 100m der Akku rausgefallen ist beim Richtungswechsel (und der war am Boden sehr straff mit Klett gesichert...).
Und: Wie sicherst Du die Pins der Servokabel wie von Dir angesprochen?
Last but not least: Habe jetzt die UltraESC in den Auslegern. Müssen die zwingend eingeschrumpft werden oder mit Plastiklack geschützt werden? Kenne das noch aus alten MK Zeiten, da waren die ESCs ja quasi nackt als Platine integriert.
Grüße
Ich löte nur die Kabel die aus den Auslegern kommen zusammen
Stomverteiler 1:
Hier kommen AWG 14 aus den Auslegern (1xrot, 1xschwarz pro Ausleger) diese laufen dann zusammen auf ein Stück AWG10, an welches zwei 4mm Goldis kommen:
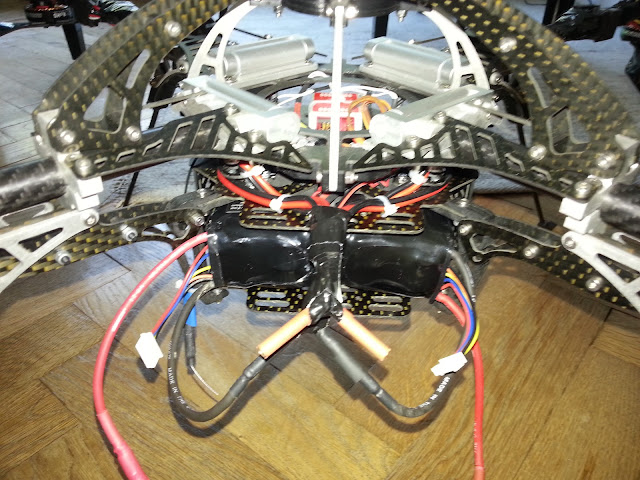
Wenn Ihr mit dem Copter fertig seid, nicht vergessen noch ALLE Kabel und Stecker zu sichern (z.b. die Stecker im Naza, ...).
Stomverteiler 1:
Hier kommen AWG 14 aus den Auslegern (1xrot, 1xschwarz pro Ausleger) diese laufen dann zusammen auf ein Stück AWG10, an welches zwei 4mm Goldis kommen:
Wenn Ihr mit dem Copter fertig seid, nicht vergessen noch ALLE Kabel und Stecker zu sichern (z.b. die Stecker im Naza, ...).
Hi... hab mal wieder Zeit gehabt zum rumfliegen... wetter war schön und ein entspanntes Wochenende. Nichts besonderes aber mir gefällts
http://youtu.be/-PCFEYxEh0s
Ahoi
http://youtu.be/-PCFEYxEh0s
Ahoi
Ich bin letzte Woche das erste mal richtig mit dem X8 geflogen. In 5 Tagen netto ca. 10 Stunden in der Luft.
Konfiguration mit 340er T-Motors und 18" Foxtech Props (die übrigens bei mir ungenau gebohrt sind).
Gains hatte ich erst von Ferdl, aber da war der Kopter recht träge. Habe dann die Gains von Tobias mal genommen und da wurde es besser. Bin bei Yaw noch höher gegangen. Genaue Werte muss ich aber noch mal in Ruhe erfliegen. Liess sich leider bisher aufgrund Zeitmangel (stecke mitten in einer Filmproduktion) noch nicht machen.
Ich bin an einem Tag bei 35km/h Windgeschwindigkeit geflogen. Die Aufnahmen waren dabei eher Glückssache... aber der Kopter selbst ist relativ souverän geflogen. Bei Windstille dann super, sehr stabil. Allerdings beim Sinken noch recht schaukelig. Evtl. ist hier noch Potential mit anderen Gains.
Geflogen bin ich mit den 4s 10Ah SLS. Über Eagletree habe ich ca. 8.000mAh rausgeflogen und hatte dann ca. 12 Minuten Flugzeit. Beim Schweben zieht der Kopter ca. 38 Ampere. Die Leistung pendelt so zwischen 500-600 Watt. Bei max. Steigflug im GPS geht die Leistung auf max. ca. 900 Watt hoch. Da hätte ich mit mehr gerechnet. Auch zieht der Kopter im Sinkflug nicht deutlich weniger Strom als beim Schweben. Die UltraESC werden dabei nicht mal handwarm.
Genaue Testflüge mit Logging werde ich machen wenn Zeit ist.
Was mir mehrfach passiert ist: Mitten im Flug ging der Kopter in den Failsave. Installiert habe ich eine Aurora9. Der Failsave kam aber immer an vergleichbaren Stellen (mitten über einem Turmdrehkran). Außerdem ist es eine Baustelle mit mehreren Kranen und viel Funk und Emissionen. Vielleicht ist es da unvermeidbar das sowas dann mal vorkommt?
Hier sehe ich auch ein grosses Problem beim FS der Naza. Die Höhe bei RTH ist ja 20 Meter. Wenn der Kran oder das Windrad vor mir allerdings 100m ist steuert der Kopter auf Luftlinie ins Verderben... Genau das wäre mir passiert wenn ich nicht sofort reagiert hätte (dazu kommt noch das bei ruhigem Kameraflug oder Position Hold der FS ja erst gar nicht bemerkt wird...).
Man müsste hier die Höhe manuell festlegen können damit Bäume etc. nicht zum Crash führen. Ich habe dann den FS nur auf Landen eingestellt. Das ist in der Regel dann in meinem Fall sicherer.
Auf jeden Fall Respekt an Tobias für die Konstruktion des Kopters. Macht Spaß und ist genau das was mir fehlte.
Ich habe zum Transport übrigens eine Zarges Eurobox 40710 in Verwendung (http://www.amazon.de/Zarges-K440-Eurobox-40710/dp/B002SYHRM0). Passt perfekt. Es geht sogar noch eine Funke oder etwas Zubehör mit rein. Die Box ist sehr robust und war mit mir schon rund um die Welt bei +40 bis -40 Grad und ohne Probleme auch als Gepäck beim Fliegen.
Für die Ausleger werde ich mir noch Hussen schneidern lassen damit die Props ausgerichtet bleiben und sich nicht gegenseitig verhaken.
P.S.: laut Info von SLS sind demnächst auch 4S mit 15.000 mAh lieferbar.
Grüße
Konfiguration mit 340er T-Motors und 18" Foxtech Props (die übrigens bei mir ungenau gebohrt sind).
Gains hatte ich erst von Ferdl, aber da war der Kopter recht träge. Habe dann die Gains von Tobias mal genommen und da wurde es besser. Bin bei Yaw noch höher gegangen. Genaue Werte muss ich aber noch mal in Ruhe erfliegen. Liess sich leider bisher aufgrund Zeitmangel (stecke mitten in einer Filmproduktion) noch nicht machen.
Ich bin an einem Tag bei 35km/h Windgeschwindigkeit geflogen. Die Aufnahmen waren dabei eher Glückssache... aber der Kopter selbst ist relativ souverän geflogen. Bei Windstille dann super, sehr stabil. Allerdings beim Sinken noch recht schaukelig. Evtl. ist hier noch Potential mit anderen Gains.
Geflogen bin ich mit den 4s 10Ah SLS. Über Eagletree habe ich ca. 8.000mAh rausgeflogen und hatte dann ca. 12 Minuten Flugzeit. Beim Schweben zieht der Kopter ca. 38 Ampere. Die Leistung pendelt so zwischen 500-600 Watt. Bei max. Steigflug im GPS geht die Leistung auf max. ca. 900 Watt hoch. Da hätte ich mit mehr gerechnet. Auch zieht der Kopter im Sinkflug nicht deutlich weniger Strom als beim Schweben. Die UltraESC werden dabei nicht mal handwarm.
Genaue Testflüge mit Logging werde ich machen wenn Zeit ist.
Was mir mehrfach passiert ist: Mitten im Flug ging der Kopter in den Failsave. Installiert habe ich eine Aurora9. Der Failsave kam aber immer an vergleichbaren Stellen (mitten über einem Turmdrehkran). Außerdem ist es eine Baustelle mit mehreren Kranen und viel Funk und Emissionen. Vielleicht ist es da unvermeidbar das sowas dann mal vorkommt?
Hier sehe ich auch ein grosses Problem beim FS der Naza. Die Höhe bei RTH ist ja 20 Meter. Wenn der Kran oder das Windrad vor mir allerdings 100m ist steuert der Kopter auf Luftlinie ins Verderben... Genau das wäre mir passiert wenn ich nicht sofort reagiert hätte (dazu kommt noch das bei ruhigem Kameraflug oder Position Hold der FS ja erst gar nicht bemerkt wird...).
Man müsste hier die Höhe manuell festlegen können damit Bäume etc. nicht zum Crash führen. Ich habe dann den FS nur auf Landen eingestellt. Das ist in der Regel dann in meinem Fall sicherer.
Auf jeden Fall Respekt an Tobias für die Konstruktion des Kopters. Macht Spaß und ist genau das was mir fehlte.
Ich habe zum Transport übrigens eine Zarges Eurobox 40710 in Verwendung (http://www.amazon.de/Zarges-K440-Eurobox-40710/dp/B002SYHRM0). Passt perfekt. Es geht sogar noch eine Funke oder etwas Zubehör mit rein. Die Box ist sehr robust und war mit mir schon rund um die Welt bei +40 bis -40 Grad und ohne Probleme auch als Gepäck beim Fliegen.
Für die Ausleger werde ich mir noch Hussen schneidern lassen damit die Props ausgerichtet bleiben und sich nicht gegenseitig verhaken.
P.S.: laut Info von SLS sind demnächst auch 4S mit 15.000 mAh lieferbar.
Grüße
Offtopic: Ich frage mich, warum hier so viele auf 340kv 18" mit 4s setzen. Ich plane gerade ein Setup mit 330kv und wollte eigentlich direkt auf 6s gehen - was spricht dagegen? Habe bislang noch keine Erfahrung mit so einem großen Setup und gehe da rein von ecalc + dingen, die ich so im Netz lese aus.
Hallo Nomad,
sehr schöner Bericht von Dir.
Ein paar Fragen hätte ich noch zu Deiner Konfiguration.
Wie schwer ist der X8 in Deiner Konfiguration?
Fliegst Du mit einem 10Ah Akku oder hast Du 2 oder mehr parallel geschaltet?
Der Failsave bei der NAZA verhält sich ja so. Wenn Du unter 20 Meter bist dann steigt er auf die höhe. Wenn Du über 20 Meter bist dann hällt er die Höhe und kehrt zuerst zur Homeposition zurück. Du hast aber recht, damit das es in manchen fällen einfach zu niedrig ist. Fliegst Du mit FPV oder rein auf Sicht? Ich könnt mir vorstellen das Du, wenn Du rein auf Sicht fliegst, an manchen Drehorten Dir eine günstigere Position suchen könntest das die Störeinflüsse von Kränen und der gleichen minimiert. Im "normalen" Flug über Wiesen und Wälder wird man diese "Störprobleme" eher seltener haben.
Über weitere Berichte und evtl. sogar mal ein aufgenommenes Video würde ich mich und vermutlich auch andere sehr freuen.
sehr schöner Bericht von Dir.
Ein paar Fragen hätte ich noch zu Deiner Konfiguration.
Wie schwer ist der X8 in Deiner Konfiguration?
Fliegst Du mit einem 10Ah Akku oder hast Du 2 oder mehr parallel geschaltet?
Der Failsave bei der NAZA verhält sich ja so. Wenn Du unter 20 Meter bist dann steigt er auf die höhe. Wenn Du über 20 Meter bist dann hällt er die Höhe und kehrt zuerst zur Homeposition zurück. Du hast aber recht, damit das es in manchen fällen einfach zu niedrig ist. Fliegst Du mit FPV oder rein auf Sicht? Ich könnt mir vorstellen das Du, wenn Du rein auf Sicht fliegst, an manchen Drehorten Dir eine günstigere Position suchen könntest das die Störeinflüsse von Kränen und der gleichen minimiert. Im "normalen" Flug über Wiesen und Wälder wird man diese "Störprobleme" eher seltener haben.
Über weitere Berichte und evtl. sogar mal ein aufgenommenes Video würde ich mich und vermutlich auch andere sehr freuen.
Hallo Andal,
ich fliege derzeit mit einem 10Ah Akku. So bleibe ich mit der RX100 noch auf 5 Kilo. Darüber brauche ich ja eine Einzel-Aufstiegserlaubnis was im Normalfall wenig Sinn macht. Soweit ich das sehe ist es nicht möglich mit 2 Akkus unter 5 Kilo zu bleiben.
FS der Naza ist bekannt. Nur wundere ich mich das man jetzt schon Geofencing einstellen kann aber nicht die Höhe des RTH.
20 Meter ist nicht viel. Im Städten sind viele Gebäude schon höher. Auf dem Land macht Dir jede Pappelreihe den Garaus.
Das Üble ist wirklich das man somit überhaupt nicht mehr präzise an Objekten fliegen kann wie ich das mache, also so 5 Meter vom Kran weg. Da reicht dann die Reaktionszeit unter Umständen nicht mehr und der Kopter ist futsch.
Mit dem reinen Landen kann mir nur noch der Kran etc. gefährlich werden wenn ich direkt drüber bin.
Wichtig ist wie beim Autofahren das man solche Momente immer geistig durchspielt und übt. Dann denkt man nicht nach sondern handelt sofort.
FPV: Ich fliege gemischt. Also mit Blick auf Monitor und Kopter. Zusätzlich noch einen Spotter, denn wenn Du weiter weg bist reicht ein Blick auf den Monitor und man findet die Kiste nur noch schwer am Himmel.
Gerade im Bereich von Objekten ist es auch extrem wichtig immer Sichtkontakt zu halten. Ich hatte bspw. unter dem Kranausleger plötzlich kein GPS mehr. Der Kopter ist mit der Windgeschwindigkeit (6m/s) ruckzuck auf den Kranturm getrieben worden. Ich habe sofort gegengesteuert, nur muss man dann auch sofort sehen wo der "Fluchtweg" ist da hinter einem auch andere Sachen wie in meinem Fall das Seil vom Kran runterhängt.
Diese kleinen Erlebnisse sind natürlich auch immer wieder Erinnerung das wir hier kein Spielzeug haben. Ich habe jetzt ca. 100 Stunden Flugerfahrung, aber sowas bringt das Adrenalin immer noch gut nach oben.
Zur Zarges Box: Die kommt ohne Inlay. Aber mit ordentlich Luftpolsterfolie eingewickelt passt der Kopter gut. Die Breite und Höhe passt gerade so, also macht ein Inlay keinen Sinn, bzw. würde auch nirgends passen.
Ich kann bei Gelegenheit mal ein Foto machen aber muss gleich schon wieder in die Oberpfalz zum Fliegen...
ich fliege derzeit mit einem 10Ah Akku. So bleibe ich mit der RX100 noch auf 5 Kilo. Darüber brauche ich ja eine Einzel-Aufstiegserlaubnis was im Normalfall wenig Sinn macht. Soweit ich das sehe ist es nicht möglich mit 2 Akkus unter 5 Kilo zu bleiben.
FS der Naza ist bekannt. Nur wundere ich mich das man jetzt schon Geofencing einstellen kann aber nicht die Höhe des RTH.
20 Meter ist nicht viel. Im Städten sind viele Gebäude schon höher. Auf dem Land macht Dir jede Pappelreihe den Garaus.
Das Üble ist wirklich das man somit überhaupt nicht mehr präzise an Objekten fliegen kann wie ich das mache, also so 5 Meter vom Kran weg. Da reicht dann die Reaktionszeit unter Umständen nicht mehr und der Kopter ist futsch.
Mit dem reinen Landen kann mir nur noch der Kran etc. gefährlich werden wenn ich direkt drüber bin.
Wichtig ist wie beim Autofahren das man solche Momente immer geistig durchspielt und übt. Dann denkt man nicht nach sondern handelt sofort.
FPV: Ich fliege gemischt. Also mit Blick auf Monitor und Kopter. Zusätzlich noch einen Spotter, denn wenn Du weiter weg bist reicht ein Blick auf den Monitor und man findet die Kiste nur noch schwer am Himmel.
Gerade im Bereich von Objekten ist es auch extrem wichtig immer Sichtkontakt zu halten. Ich hatte bspw. unter dem Kranausleger plötzlich kein GPS mehr. Der Kopter ist mit der Windgeschwindigkeit (6m/s) ruckzuck auf den Kranturm getrieben worden. Ich habe sofort gegengesteuert, nur muss man dann auch sofort sehen wo der "Fluchtweg" ist da hinter einem auch andere Sachen wie in meinem Fall das Seil vom Kran runterhängt.
Diese kleinen Erlebnisse sind natürlich auch immer wieder Erinnerung das wir hier kein Spielzeug haben. Ich habe jetzt ca. 100 Stunden Flugerfahrung, aber sowas bringt das Adrenalin immer noch gut nach oben.
Zur Zarges Box: Die kommt ohne Inlay. Aber mit ordentlich Luftpolsterfolie eingewickelt passt der Kopter gut. Die Breite und Höhe passt gerade so, also macht ein Inlay keinen Sinn, bzw. würde auch nirgends passen.
Ich kann bei Gelegenheit mal ein Foto machen aber muss gleich schon wieder in die Oberpfalz zum Fliegen...
@Nomad,
Durch neues Einlernen des "Home-Points", kannst Du die RTH-Höhe beeinflussen. Also z.B. nach dem Starten auf 100m steigen, dann Home-Point neu einlernen, dann kommt er bei jedem Failave auf 120m zurück. Bitte nur machen wenn Du Dich sicher im Umgang mit dem "Homepoint neu einlernen" fühlst.
Nein, er stellt dann nicht bei 100m die Motoren ab, er landet ganz normal am Boden.
Edit:
Wenn Du mit der Aurora9/ Optima9 fliegst (fliege ich ja auch immer noch ...) dann würde ich darauf achten, alle Antennen senkrecht auszurichten, also beide am Copter (an unterschiedlichen Positionen) und an der Fernsteuerung. Die Antennen am Copter so weit wie möglich nach unten montieren und natürlich so weit wie möglich weg von allen anderen Sendern (VTX). Wenn das alles nichts hilft kannst Du auch die Antenne am Modul wechseln z.B. eine +9db Patch oder einen ´9db Rundstahler (aus dem Wlan-Router Sortiment). Im Modul sitzt ein Pigtail, hier kann man einfach ein Adapterkabel herausführen an dem man dann die Antennen verschrauben kann. Hab damit 6,5km Reichweite ohne einen Failsave-wacker geschafft (natürlich ohne Kräne dazwischen).
lg Ferdl
Durch neues Einlernen des "Home-Points", kannst Du die RTH-Höhe beeinflussen. Also z.B. nach dem Starten auf 100m steigen, dann Home-Point neu einlernen, dann kommt er bei jedem Failave auf 120m zurück. Bitte nur machen wenn Du Dich sicher im Umgang mit dem "Homepoint neu einlernen" fühlst.
Nein, er stellt dann nicht bei 100m die Motoren ab, er landet ganz normal am Boden.
Edit:
Wenn Du mit der Aurora9/ Optima9 fliegst (fliege ich ja auch immer noch ...) dann würde ich darauf achten, alle Antennen senkrecht auszurichten, also beide am Copter (an unterschiedlichen Positionen) und an der Fernsteuerung. Die Antennen am Copter so weit wie möglich nach unten montieren und natürlich so weit wie möglich weg von allen anderen Sendern (VTX). Wenn das alles nichts hilft kannst Du auch die Antenne am Modul wechseln z.B. eine +9db Patch oder einen ´9db Rundstahler (aus dem Wlan-Router Sortiment). Im Modul sitzt ein Pigtail, hier kann man einfach ein Adapterkabel herausführen an dem man dann die Antennen verschrauben kann. Hab damit 6,5km Reichweite ohne einen Failsave-wacker geschafft (natürlich ohne Kräne dazwischen).
lg Ferdl
Zuletzt bearbeitet:
Meine Aurora hat nur eine Antenne die man ändern kann. Würde als ersten Schritt mal versuchen die Antennen alle senkrecht auszurichten ob Dir das schon hilft/reicht. Die Antenne am Sendemodul zu wechseln ist zwar nicht schwer, würde ich aber erst machen, wenn das andere nicht ausreicht, da es schon eine größere Operation ist. Am Kopter jedenfalls unbedingt so weit wie möglich nach unten, ev auch den Empfänger weiter runter setzen, und die Videoantenne so weit wie möglich davon fern halten.
Normalerweise wenn Du in ein failsave fliegst, reicht es schon die Fersteuerung "hoch" zu halten, um das eine oder andere db rauszukitzeln.
lg Ferdl
Normalerweise wenn Du in ein failsave fliegst, reicht es schon die Fersteuerung "hoch" zu halten, um das eine oder andere db rauszukitzeln.
lg Ferdl
Glaube Du hast mich falsch verstanden. Ich meinte die Antenne des Empfängers. Davon gibt es ja zwei. Am Sender wollte ich soweit nix ändern. Einige Experten setzen da ja noch einen WLAN Booster dazwischen, aber ich wollte kein Extrem FPV betreiben sondern nur ordentliche Aufnahmen machen ohne dauernd den Stressfaktor Failsave im Nacken (wobei man ja trotzdem immer drauf gefasst sein sollte...).
Generell muss ich aber noch mal bei Gelegenheit die ganze Antennen-Technik etwas optimieren. Habe z.B. recht viel Störungen im FPV Signal.
Generell muss ich aber noch mal bei Gelegenheit die ganze Antennen-Technik etwas optimieren. Habe z.B. recht viel Störungen im FPV Signal.
@Nomad,
Am Copter würde ich das nicht machen, die BODA-Antennen sind schon von Haus aus in Ordnung, und jede weiter Antenne mit höherem Gewinn, bezahlst Du mit höherer Richtwirkung. Bei den Rundstrahlern wird die Top (und Bottom)-Null ausgeprägter (+9db strahlt rundherum mit einem Öffnungswinkel von ca 20°). Am Boden kann man das gut kontrollieren, am Copter eher nicht.
Aber ich hab das heute selber ausgiebig getestet (also der Moment war eher kurz die Suche dann sehr lange ...). Wenn man keine Flüge an den Rand der Reichweite unternimmt, sonder bei Hindernissen (z.B. Wald) herumkurvt, dann erscheint es mir nun angebrachter bei Failsave auf "hold" zu schalten. Hatte heute ein RTH auf der falschen Seite vom Wald, war so überrascht von der Videoverbindung, dass ich gar nicht an die RC-Verbindung gedacht hatte (stand auch mit dem Rücken zum Copter).
Aber mehr davon in Kürze in "Klappfixx Crashtest"
lg Ferdl
P.S.: Wenn man Kopter suchen geht, immer darauf vertrauen wo man glaubt dass er liegen müsste. Wenn er am Waldrand liegen muss, dann auch dort suchen und nicht im ganzen Wald herumstiefeln.
Am Copter würde ich das nicht machen, die BODA-Antennen sind schon von Haus aus in Ordnung, und jede weiter Antenne mit höherem Gewinn, bezahlst Du mit höherer Richtwirkung. Bei den Rundstrahlern wird die Top (und Bottom)-Null ausgeprägter (+9db strahlt rundherum mit einem Öffnungswinkel von ca 20°). Am Boden kann man das gut kontrollieren, am Copter eher nicht.
Aber ich hab das heute selber ausgiebig getestet (also der Moment war eher kurz die Suche dann sehr lange ...). Wenn man keine Flüge an den Rand der Reichweite unternimmt, sonder bei Hindernissen (z.B. Wald) herumkurvt, dann erscheint es mir nun angebrachter bei Failsave auf "hold" zu schalten. Hatte heute ein RTH auf der falschen Seite vom Wald, war so überrascht von der Videoverbindung, dass ich gar nicht an die RC-Verbindung gedacht hatte (stand auch mit dem Rücken zum Copter).
Aber mehr davon in Kürze in "Klappfixx Crashtest"
lg Ferdl
P.S.: Wenn man Kopter suchen geht, immer darauf vertrauen wo man glaubt dass er liegen müsste. Wenn er am Waldrand liegen muss, dann auch dort suchen und nicht im ganzen Wald herumstiefeln.

