
LUA für Pixhawk/AUAV-X2 und Taranis
- Themenstarter Jace25
- Beginndatum
In der Taranis bei der Sensorliste kannst du sagen, welcher Datentyp geliefert wird. Dort musst du RAW sagen, also echte Werte ohne irgendwelche Berechnungs oder Umrechungsfunktionen.
Steht aber auch in der Anleitung zu meinem Script")
Steht aber auch in der Anleitung zu meinem Script
Now its your turn to name the sensors right, so the lua script can make use of them. Also, each sensor has to set to raw data. Naming is casesensitive!
Hi,
ich brauche jetzt auch mal Hilfe, nachdem ich schon ewig am Suchen und nicht Finden bin.
Ich bekomme bei meiner X9D und X4R Receiver nur vier Standard-Sensoren, vermutlich die vom Empfänger selbst.
Bei meiner Taranis finde ich keinen Menüpunkt, wo ich einen Datentyp als RAW festlegen könnte. Das einzige ist ein Häkchen bei "Keine Multisen-ID", ansonsten kann ich nur suchen, löschen, manuell hinzufügen.
Der Empfänger ist über Serial1 am AUAV-X2 angeschlossen, Protokoll steht auf 4 (S-Port), Baudrate 57.
Mein Copter ist allerdings noch nicht komplett konfiguriert, muss man sagen. Muss da voher alles stimmen/funktionieren/fliegen? Dachte, ich fange bei der Telemetrie an.
Man sollte auch sagen, dass ich zwar schon einige Copter, Flächenmodelle und Hubis seit einigen Jahren fliege, die Taranis und Arducopter allerdings komplettes Neuland für mich sind.
Grüße, Stephan
ich brauche jetzt auch mal Hilfe, nachdem ich schon ewig am Suchen und nicht Finden bin.
Ich bekomme bei meiner X9D und X4R Receiver nur vier Standard-Sensoren, vermutlich die vom Empfänger selbst.
Bei meiner Taranis finde ich keinen Menüpunkt, wo ich einen Datentyp als RAW festlegen könnte. Das einzige ist ein Häkchen bei "Keine Multisen-ID", ansonsten kann ich nur suchen, löschen, manuell hinzufügen.
Der Empfänger ist über Serial1 am AUAV-X2 angeschlossen, Protokoll steht auf 4 (S-Port), Baudrate 57.
Mein Copter ist allerdings noch nicht komplett konfiguriert, muss man sagen. Muss da voher alles stimmen/funktionieren/fliegen? Dachte, ich fange bei der Telemetrie an.
Man sollte auch sagen, dass ich zwar schon einige Copter, Flächenmodelle und Hubis seit einigen Jahren fliege, die Taranis und Arducopter allerdings komplettes Neuland für mich sind.
Grüße, Stephan
Zuletzt bearbeitet:

Hm, da tut sich immer noch nichts.
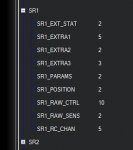
SR1 ist wie auf dem Screenshot eingestellt.
Bei mir gibt es auch das RAW-Menü, von dem Jace spricht, nicht, oder ich finde es einfach nicht:
Grüße!
SR1 ist wie auf dem Screenshot eingestellt.
Bei mir gibt es auch das RAW-Menü, von dem Jace spricht, nicht, oder ich finde es einfach nicht:
In der Taranis bei der Sensorliste kannst du sagen, welcher Datentyp geliefert wird. Dort musst du RAW sagen, also echte Werte ohne irgendwelche Berechnungs oder Umrechungsfunktionen.
Anhänge
-
 18,2 KB Aufrufe: 109
18,2 KB Aufrufe: 109
RAW ist kein Menü, sondern ein "Dateiausgabeformat", also eine "Roh-Datei" ohne Zusatzbezeichnung wie mAh, V, oder °C.
Geht in Eurem Sender in das Menü -> Page Taste lang drücken, dann seid Ihr im TELEMETRIE-Menü,
dann zeigt es da die gefundenen Sensoren an, jetzt wählt ihr einen gefunden Sensor aus, dann steht da im Sensor "Name, Type, ID, Einheit.... und bei Einheit müssen einfach "---" stehen, dann sind es RAW-Ausgaben.
Jetzt mit der EXIT-Taste wieder auf den Startbildschirm -> Page Taste lang drücken bis das LUA-Script öffnet und mit einem langen Druck auf MENU das LUA-Script resetten.
Das war alles.
RAW deshalb, weil das LUA-Script die Werte anhand der Sensorennamen selbstständig verarbeiten und entsprechend richtig zuordnen kann.
Geht in Eurem Sender in das Menü -> Page Taste lang drücken, dann seid Ihr im TELEMETRIE-Menü,
dann zeigt es da die gefundenen Sensoren an, jetzt wählt ihr einen gefunden Sensor aus, dann steht da im Sensor "Name, Type, ID, Einheit.... und bei Einheit müssen einfach "---" stehen, dann sind es RAW-Ausgaben.
Jetzt mit der EXIT-Taste wieder auf den Startbildschirm -> Page Taste lang drücken bis das LUA-Script öffnet und mit einem langen Druck auf MENU das LUA-Script resetten.
Das war alles.
RAW deshalb, weil das LUA-Script die Werte anhand der Sensorennamen selbstständig verarbeiten und entsprechend richtig zuordnen kann.
Hi,
okay, das hatte ich mir auch gedacht, und auch so gefunden. Klang nur so, als müsse die Taranis erst gezielt nach einheitslosen Sensordaten suchen.
Heißt, wenn sie nur 4 Sensorwerte findet, kann ich auch keine anderen Werte auf Raw stellen. Der Sender sollte also unabhängig von der Einstellung einzelner Sensoren zumindest schonmal mehr finden, bevor ich weitermachen kann, richtig?
Grüße, Stephan
okay, das hatte ich mir auch gedacht, und auch so gefunden. Klang nur so, als müsse die Taranis erst gezielt nach einheitslosen Sensordaten suchen.
Heißt, wenn sie nur 4 Sensorwerte findet, kann ich auch keine anderen Werte auf Raw stellen. Der Sender sollte also unabhängig von der Einstellung einzelner Sensoren zumindest schonmal mehr finden, bevor ich weitermachen kann, richtig?
Grüße, Stephan
Hi,
ja, das hatte ich auch gedacht. Flightmodes wechseln, etc.. funktioniert und quittiert der Copter mit einem Piepton, also müsste da auch was kommen.
@Sl6der, wie hast du dein Problem letztendlich gelöst? Du hattest ja auch zuletzt danach gefragt, weil deine Taranis nur 4 Sensoren gefunden hat.
Grüße, Stephan
ja, das hatte ich auch gedacht. Flightmodes wechseln, etc.. funktioniert und quittiert der Copter mit einem Piepton, also müsste da auch was kommen.
@Sl6der, wie hast du dein Problem letztendlich gelöst? Du hattest ja auch zuletzt danach gefragt, weil deine Taranis nur 4 Sensoren gefunden hat.
Grüße, Stephan
"must have" Fakten:
1. ArduCopter 3.3 aufwärts reicht ein billiger RS323->TTL Wandler + 1N4001 Diode, unter AC 3.3 MUSS ein Teensy verwendet werden.
2. Taranis Firmware sollte OpenTX 2.1.6 sein (2.1.7 habe ich noch nicht getestet)
3. Verkablung vom Pixhawk zum Wandler und vom Wandler zum Empfänger prüfen (TX<->RX / RX <-> TX)
4. MissionPlanner Telemetrie Baudrate 57, Ausgabeformat die "4" für X-Serie und "3" für D-Serie Empfänger
4a. ICH musste im Missionplanner nichts von den SR-Werten wie hier einige Posts vorher schon geschrieben wurde verändern. (Mein Pixhawk läuft derzeit mit der letzten stable Version (AC 3.3.2))
5. Ich würde empfehlen dem Empfänger einen extra Serialport für die Telemetrie zu geben (kein gesplitteter mit OSD oder 3DR Radio)
5a. Ab diesem Punkt MÜSSEN die Sensoren in der Taranis aufgelistet und gefunden werden.
6. Unbedingt die Sensoren löschen und neu suchen.
6a. Sollten KEINE Sensoren gefunden werden, dann ALLES nochmal Schritt für Schritt durchgehen. Die Sensoren erscheinen bei einer neuen Suche SELBSTSTÄNDIG, da muss nichts verändert oder manuell eingegeben werden. Auch die Ausgabe für das Script funktioniert ohne RAW.... Hängt Euch nicht an dem RAW auf, wenn der Sender schon vorher keine Sensoren gefunden hat.
7. LUAPilot nach dem die Sensoren gefunden wurden mit >MENU-Taste lang drücken< neu starten.
1. ArduCopter 3.3 aufwärts reicht ein billiger RS323->TTL Wandler + 1N4001 Diode, unter AC 3.3 MUSS ein Teensy verwendet werden.
2. Taranis Firmware sollte OpenTX 2.1.6 sein (2.1.7 habe ich noch nicht getestet)
3. Verkablung vom Pixhawk zum Wandler und vom Wandler zum Empfänger prüfen (TX<->RX / RX <-> TX)
4. MissionPlanner Telemetrie Baudrate 57, Ausgabeformat die "4" für X-Serie und "3" für D-Serie Empfänger
4a. ICH musste im Missionplanner nichts von den SR-Werten wie hier einige Posts vorher schon geschrieben wurde verändern. (Mein Pixhawk läuft derzeit mit der letzten stable Version (AC 3.3.2))
5. Ich würde empfehlen dem Empfänger einen extra Serialport für die Telemetrie zu geben (kein gesplitteter mit OSD oder 3DR Radio)
5a. Ab diesem Punkt MÜSSEN die Sensoren in der Taranis aufgelistet und gefunden werden.
6. Unbedingt die Sensoren löschen und neu suchen.
6a. Sollten KEINE Sensoren gefunden werden, dann ALLES nochmal Schritt für Schritt durchgehen. Die Sensoren erscheinen bei einer neuen Suche SELBSTSTÄNDIG, da muss nichts verändert oder manuell eingegeben werden. Auch die Ausgabe für das Script funktioniert ohne RAW.... Hängt Euch nicht an dem RAW auf, wenn der Sender schon vorher keine Sensoren gefunden hat.
7. LUAPilot nach dem die Sensoren gefunden wurden mit >MENU-Taste lang drücken< neu starten.
Bestens, danke! Eigentlich hab ich sämtliche Punkte bis zur 6 schon paarmal gestestet, geändert, etc.. und in der vorgeschlagenen Konfiguration gehabt.
Die einzige Unsicherheit besteht noch bei der Verbindung zwischen Wandler und Empfänger, denn hier ist RX mit RX verbunden, allerdings auf Wandlerseite RX über die Diode mit TX.
Als Diode hab ich eine 1N4007 verlötet, die sich aber nach Datenblatt nur in ihrer maximalen, bzw. Rückwärtsspannung von der 1N4001 unterscheidet.
Ich neige schon dazu, dem Wandler mal ne Stiftleiste zu verpassen, damit ich auch mal am anderen Telemetrie-Ausgang testen kann.
Grüße, Stephan
Die einzige Unsicherheit besteht noch bei der Verbindung zwischen Wandler und Empfänger, denn hier ist RX mit RX verbunden, allerdings auf Wandlerseite RX über die Diode mit TX.
Als Diode hab ich eine 1N4007 verlötet, die sich aber nach Datenblatt nur in ihrer maximalen, bzw. Rückwärtsspannung von der 1N4001 unterscheidet.
Ich neige schon dazu, dem Wandler mal ne Stiftleiste zu verpassen, damit ich auch mal am anderen Telemetrie-Ausgang testen kann.
Grüße, Stephan
Ja mach das mal.
Die Diode spielt keine Rolle, insofern sie richtig eingelötet ist.
Und mit Deiner Aussage hast du absolut recht.
Ich kenne bei unseren Modellbauvorhaben nichts wo, RX-RX und TX-TX geschalten wird.
Pixhawk sendet und der Wandler empfängt, ebenso bei den GPS Modulen, Mag, Telemetrie etc...
Wichtig ist auch, dass die TTL-Seite zum Pixhawk zeigt und nicht zum Empfänger.
Kontrollier das nochmal:
http://fpv-community.de/showthread....WK-aus-Bulgarien!/page358&p=900588#post900588
Die Diode spielt keine Rolle, insofern sie richtig eingelötet ist.
Und mit Deiner Aussage hast du absolut recht.
Ich kenne bei unseren Modellbauvorhaben nichts wo, RX-RX und TX-TX geschalten wird.
Pixhawk sendet und der Wandler empfängt, ebenso bei den GPS Modulen, Mag, Telemetrie etc...
Wichtig ist auch, dass die TTL-Seite zum Pixhawk zeigt und nicht zum Empfänger.
Kontrollier das nochmal:
http://fpv-community.de/showthread....WK-aus-Bulgarien!/page358&p=900588#post900588
"must have" Fakten:
1. ArduCopter 3.3 aufwärts reicht ein billiger RS323->TTL Wandler + 1N4001 Diode, unter AC 3.3 MUSS ein Teensy verwendet werden.
2. Taranis Firmware sollte OpenTX 2.1.6 sein (2.1.7 habe ich noch nicht getestet)
3. Verkablung vom Pixhawk zum Wandler und vom Wandler zum Empfänger prüfen (TX<->RX / RX <-> TX)
4. MissionPlanner Telemetrie Baudrate 57, Ausgabeformat die "4" für X-Serie und "3" für D-Serie Empfänger
4a. ICH musste im Missionplanner nichts von den SR-Werten wie hier einige Posts vorher schon geschrieben wurde verändern. (Mein Pixhawk läuft derzeit mit der letzten stable Version (AC 3.3.2))
5. Ich würde empfehlen dem Empfänger einen extra Serialport für die Telemetrie zu geben (kein gesplitteter mit OSD oder 3DR Radio)
5a. Ab diesem Punkt MÜSSEN die Sensoren in der Taranis aufgelistet und gefunden werden.
6. Unbedingt die Sensoren löschen und neu suchen.
6a. Sollten KEINE Sensoren gefunden werden, dann ALLES nochmal Schritt für Schritt durchgehen. Die Sensoren erscheinen bei einer neuen Suche SELBSTSTÄNDIG, da muss nichts verändert oder manuell eingegeben werden. Auch die Ausgabe für das Script funktioniert ohne RAW.... Hängt Euch nicht an dem RAW auf, wenn der Sender schon vorher keine Sensoren gefunden hat.
7. LUAPilot nach dem die Sensoren gefunden wurden mit >MENU-Taste lang drücken< neu starten.
1. ArduCopter 3.3 aufwärts reicht ein billiger RS323->TTL Wandler + 1N4001 Diode, unter AC 3.3 MUSS ein Teensy verwendet werden.
2. Taranis Firmware sollte OpenTX 2.1.6 sein (2.1.7 habe ich noch nicht getestet)
3. Verkablung vom Pixhawk zum Wandler und vom Wandler zum Empfänger prüfen (TX<->RX / RX <-> TX)
4. MissionPlanner Telemetrie Baudrate 57, Ausgabeformat die "4" für X-Serie und "3" für D-Serie Empfänger
4a. ICH musste im Missionplanner nichts von den SR-Werten wie hier einige Posts vorher schon geschrieben wurde verändern. (Mein Pixhawk läuft derzeit mit der letzten stable Version (AC 3.3.2))
5. Ich würde empfehlen dem Empfänger einen extra Serialport für die Telemetrie zu geben (kein gesplitteter mit OSD oder 3DR Radio)
5a. Ab diesem Punkt MÜSSEN die Sensoren in der Taranis aufgelistet und gefunden werden.
6. Unbedingt die Sensoren löschen und neu suchen.
6a. Sollten KEINE Sensoren gefunden werden, dann ALLES nochmal Schritt für Schritt durchgehen. Die Sensoren erscheinen bei einer neuen Suche SELBSTSTÄNDIG, da muss nichts verändert oder manuell eingegeben werden. Auch die Ausgabe für das Script funktioniert ohne RAW.... Hängt Euch nicht an dem RAW auf, wenn der Sender schon vorher keine Sensoren gefunden hat.
7. LUAPilot nach dem die Sensoren gefunden wurden mit >MENU-Taste lang drücken< neu starten.
 .3
.3
