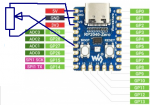
So, nun ist das Chaos nur noch größer: Ich hab den RP2040 nun nochmal mit gedrückter BOOT -Taste angeschlossen. Er wird zwar als Laufwerk RP1/RP2 angezeigt, allerdings wird, wenn die gui.exe gestartet wird kein Port angezeigt und wenn versucht wird mit connect zu verbinden eine Fehlermeldung angezeigt: der angegebene Pfad wird nicht gefunden. Im Gerätemanager wird das Teil mit gelbem Ausrufezeichen angezeigt: kein Treiber vorhanden.
Kann mir von den Spezialisten bitte einer helfen! Das wäre sehr nett Leute.
Jürgen
P.S. So, ein kleiner Schritt weiter: Anscheinend muss man, sobald man den RP mit gedrückter BOOT -Taste mit dem Rechner verbindet die uf2-Datei wie von Carbo beschrieben wieder neu (Zitat) In das "RPI-RP2"-Laufwerk, das dann aufpoppt, schreiben. Dann wird der Prozessor auch wieder gefunden.

")