
MultiWiiCopter mit AERODUINO-FUN - eine Flightcontrol für ca. 15€?
- Themenstarter JUERGEN_
- Beginndatum
Das wirds wohl ein Cut-Out werden wie im Wiki (http://fpv-community.de/wiki/index.php?title=BMA020_WMPCLONE) beschrieben.
Interessant ist nur, dass bei mir in der Config keine überhöhten Ausschläge des Clones sondern nichts zu sehen ist.
Ist der Clone durch das Anlegen der 5 Volt anstatt 3,3V schon kaputt gegangen?
Als PullUps nehme ich dann die beschriebenen 3,9KOhm-Widerstände.
@taler
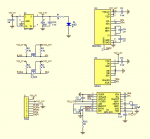
BMA020 die SCL/SDA auf A2/A3 vom Arduino. 2,2kOhm Widerstände zwischen SCL/SDA und VCC. Und wie in den diversen Foreneinträgen beschrieben: VCC, GN, SDA und SCL vom WM+ ebenfalls angeschlossen. Aber nur der BMA020 hat funktioniert, vom Clone kam nichts bzw. eine braune Linie, die sich nicht verändert hat, in der Config.
Interessant ist nur, dass bei mir in der Config keine überhöhten Ausschläge des Clones sondern nichts zu sehen ist.
Ist der Clone durch das Anlegen der 5 Volt anstatt 3,3V schon kaputt gegangen?
Als PullUps nehme ich dann die beschriebenen 3,9KOhm-Widerstände.
@taler
BMA020 die SCL/SDA auf A2/A3 vom Arduino. 2,2kOhm Widerstände zwischen SCL/SDA und VCC. Und wie in den diversen Foreneinträgen beschrieben: VCC, GN, SDA und SCL vom WM+ ebenfalls angeschlossen. Aber nur der BMA020 hat funktioniert, vom Clone kam nichts bzw. eine braune Linie, die sich nicht verändert hat, in der Config.
Dazu hab ich auf der Unterseite den 3,3V Spannungsregler bestückt und lege die auf den VCC Pin von SV1 (Lötjumper SJ1)
Da kann ich dann das Cut-Out anschließen und testen wie es reagiert.
Ich hab bisher immer die Version 1.8 Patch2 verwendet.
Da gibt es keine Probleme mit den I2C Widerständen.

Gruß taler
. . .
eigentlich hat sich der WMP-Cut (ITG3205) heutzutage erledigt.")
eigentlich hat sich der WMP-Cut (ITG3205) heutzutage erledigt.
bei nem Preis von 39,90 € eine 10DOF aus China zu importieren.

-> http://www.drotek.fr/shop/en/62-imu-10dof-mpu6050-hmc5883-ms5611.html
AERODUINO-FUN mit 6DOF MPU6050
.
und egal wo man kauft, es gibts garantiert dann noch etwas Günstiger.
wie hier die 6DOF MPU6050 für unter $10,00

-> http://www.dealextreme.com/p/gy-521...yroscope-accelerometer-for-mwc-arduino-148190
.
und egal wo man kauft, es gibts garantiert dann noch etwas Günstiger.
wie hier die 6DOF MPU6050 für unter $10,00
-> http://www.dealextreme.com/p/gy-521...yroscope-accelerometer-for-mwc-arduino-148190
IMU 10DOF , für ganze EUR 27,90
ist schon Mysteriös,
und hier kost das Teil ganze EUR 27,90
-> http://www.ebay.de/itm/280833652536
. . . .

und wie ich gerade sehe Lohnt sich sogar kaum,
bei nem Preis von 39,90 € eine 10DOF aus China zu importieren.
-> http://www.drotek.fr/shop/en/62-imu-10dof-mpu6050-hmc5883-ms5611.html
bei nem Preis von 39,90 € eine 10DOF aus China zu importieren.
-> http://www.drotek.fr/shop/en/62-imu-10dof-mpu6050-hmc5883-ms5611.html
und hier kost das Teil ganze EUR 27,90
-> http://www.ebay.de/itm/280833652536
. . . .
Vielleicht abverkauf? Will er eine neue Version an den Start bringen?
Das Einzige was ich mir vorstellen könnte wäre einen Jumper für die beiden I2C Anschlüsse für den Mag. Bei Free IMU ist das Mag ja am MPU6050 I2C Port. Noch besser fände ich hier einen kleinen Lötjumper.
Geh ich recht in der Annahme, dass es bei der Drotek 10 DOF direkt am I2C hängt?
Update: Wer lesen kann: Im Angebot steht weiter unten im MultiWii-code:
"#define MPU6050_EN_I2C_BYPASS // MAG connected to the AUX I2C bus of MPU6050"
Wenn das stimmt hängt der MAG also schon am AUX I2C des MPU6050.
Das Einzige was ich mir vorstellen könnte wäre einen Jumper für die beiden I2C Anschlüsse für den Mag. Bei Free IMU ist das Mag ja am MPU6050 I2C Port. Noch besser fände ich hier einen kleinen Lötjumper.
Geh ich recht in der Annahme, dass es bei der Drotek 10 DOF direkt am I2C hängt?
Update: Wer lesen kann: Im Angebot steht weiter unten im MultiWii-code:
"#define MPU6050_EN_I2C_BYPASS // MAG connected to the AUX I2C bus of MPU6050"
Wenn das stimmt hängt der MAG also schon am AUX I2C des MPU6050.
MultiWiiCopter mit AERODUINO-FUN
.
wer natürlich einen USB mitfliegen lassen will, und alles leicht auswechselbar braucht.
kann auch auf einen ARDUINO-NANO-3 zurückgreifen,
es wird nur zusätzlich eine IMU gebraucht

Beschreibung hier -> http://fpv-community.de/showthread.php?5149-Multi-Wii-Copter-Nano-EXTREM-Zusammenstellung
wem die LED auf dem ARDUINO nicht reichen, kann auch die Transistoren bestücken,
und Power-LED anschliessen.
ARDUINO-NANO-3 sind inzwischen für unter 10€ zu haben,
 incl.
incl.
-> http://dx.com/p/nano-v3-0-avr-atmega328-p-20au-module-board-usb-cable-for-arduino-118037?item=3
.
wer natürlich einen USB mitfliegen lassen will, und alles leicht auswechselbar braucht.
kann auch auf einen ARDUINO-NANO-3 zurückgreifen,
es wird nur zusätzlich eine IMU gebraucht
Beschreibung hier -> http://fpv-community.de/showthread.php?5149-Multi-Wii-Copter-Nano-EXTREM-Zusammenstellung
wem die LED auf dem ARDUINO nicht reichen, kann auch die Transistoren bestücken,
und Power-LED anschliessen.
ARDUINO-NANO-3 sind inzwischen für unter 10€ zu haben,
-> http://dx.com/p/nano-v3-0-avr-atmega328-p-20au-module-board-usb-cable-for-arduino-118037?item=3
.
ist hier inzwischen durch Forumumstellung verloren gegangen.
hier auch zu finden.
-> http://forum.x-3d.de/bb/download.php?id=13787
http://forum.x-3d.de/bb/viewtopic.php?p=172269#172269
ist hier inzwischen durch Forumumstellung verloren gegangen.
hier auch zu finden.
-> http://forum.x-3d.de/bb/download.php?id=13787
http://forum.x-3d.de/bb/viewtopic.php?p=172269#172269
Entwarnung!
Acc läuft. Ich habe in der Sensor.pde die Adresse auf 0xA6 geändert.
Danke für den Beistand
Acc läuft. Ich habe in der Sensor.pde die Adresse auf 0xA6 geändert.
Danke für den Beistand
habe das selbe Problem, bei meinem ADXL345 laufen auch die IC2-Errors hoch und runter...
ich habe Version 2.1 und auch ADXL345 in der config.h kommentiert bzw. die internen Pullups kommentiert.
Ebenso habe ich in der Sensors.pde die ADXL345 Adresse auf 0xA6 geändert.
Im GUI zählen immernoch die IC2-Errors hoch und runter :S:
hat irgendjemand eine Idee was da zu machen ist?
Grüße
Dareios


AERODUINO mit 6DOF - MPU6050 -
.
ein AERODUINO ist als reines Fluggerät noch lange nicht geschlagen.
und egal wo man kauft,
es gibt es dann garantiert Irgendwo, noch etwas Günstiger.
wie hier, die 6DOF MPU6050 für ca. EUR 5,25

-> http://www.ebay.de/itm/370691521469
.
ein AERODUINO ist als reines Fluggerät noch lange nicht geschlagen.
und egal wo man kauft,
es gibt es dann garantiert Irgendwo, noch etwas Günstiger.
wie hier, die 6DOF MPU6050 für ca. EUR 5,25
-> http://www.ebay.de/itm/370691521469

