Moin,
nach langem rumgebastel melde ich mich wieder.
Nachdem ich in den Logs "IMU" aktiviert habe, ist mir aufgefallen, dass die Accs vielleicht doch etwas zu hoch sind.
War nicht extrem aber über den +/-3 (X;Y) bzw +/-5 (Z).
Ich habe die
Gewindewellen der Suppos wieder ausgebaut und die original Wellen eingebaut. Dazu noch Mitnehmer von Hacker gekauft, weil die original Mitnehmer der Suppos immer wegfliegen.
Jetzt verursachen die Motoren weniger Vibrationen. Die Props waren vorher auch schon gewuchtet.
Die Gewindewellen hatten etwas gestört.
Zusätzlich habe ich mir von HongKong-Pfui Gelpads gekauft und das APM-Board auf den Gelpads gelagert.
Die Acc-Logs sehen eigentlich OK aus und sollten im grünen Bereich liegen. AccZ ist vielleicht noch etwas viel aber es geht noch.
Hier mal die Graphen vom Testflug:
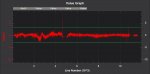
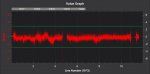

Der Copter ist geflogen aber er eiert immer noch so komisch rum. Mit default Werten ging es noch aber war trotzdem schon zu merken.
Als ich I und D auf Null gestetzt und P auf den Poti gelegt hatte, sah es wieder genau so aus wie in meinem letzten Video zu sehen.
Hat vielleicht sonst noch wer eine Idee woran das liegen könnte?
Vielen Dank!
Grüße
Jonas








