
Noch ein kleiner Prüfstand
- Themenstarter Bamfax
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Danke Zero. Das erklärt dann auch warum bei erreichen eines gegebenen Gasstands kurz darauf die Stromaufnahme wieder zurückgeht. Was hast Du denn mit Batteriemgmt zu tun? ")
Reproduzierbare Ergebnisse erhält man, wenn man möglichst alle statischen Rahmenbedingungen gewährleistet und die veränderlichen misst bzw. berücksichtigt. Statische Rahmenbedingungen sind z.B. die Hebel des Teststandes, die barrierefreie Umgebung für den Luftstrom, ein Bauplan der an möglichst vielen Orten auf der Welt nachbaubar ist usw. Veränderliche Größen, die das Ergebniss beeinflussen sind z.B. verschiedene Temperaturen oder unterschiedlicher Luftdruck. Jemand mit Deinem Testaufbau erzielt z.B. in Tibet ganz andere Ergebnisse als jemand in Rio auf Meereshöhe. Wenn die Ergebnisse so unterschiedlich sind, kann man sie nur schlecht vergleichen. Dazu gehört übrigends auch eine einheitliche Teststrategie. Du hast ja selber gesehen, dass das Ergebnis variieren kann, abhängig davon ob die Werte beim initialen Erreichen eines Gaswertes erreicht werden, oder ob man erstmal eine Minute auf dem Wert verharrt. Es muss also erstmal ein entsprechend praktikabler Testzyklus gefunden werden. Dazu gibt es noch technische Feinheiten, wie eine stabile Stromversorgung für alle Komponenten, vor allem für die Sensoren usw.
Und während ich so durchs Netz irre und nach Hallsensoren gucke und mir die dürftige Genauigkeit auffällt, bin ich irgendwann bei den BMS-ICs angekommen...
Ich bin da aber noch in einer ganz frühen Phase. Ich rechne frühestens im Herbst mit ersten konkreten Realisierungsbemühungen.
Servus Zero, sind die ICs denn soviel besser als der Rest?
Es ist echt zum ärgern, das Programm war am Wochenende eigentlich fast fertig, jetzt hab ich noch die GUI aufgehübscht, "String" Variablen hinzugefügt, und jetzt stürzt es bei Serial Read / Writes nach belieben hab... mache ich einen String / Char weg, läuft es wieder, mache ich einen dazu, stürzt es irgendwo anders ab.
Anscheinend wird der Speicher knapp, oder das Ding hat irgendwelche Probleme bei den String Operation. Jetzt müsste man die Internas von Arduino beherrschen
Hat jemand sowas schonmal gehabt und weiß Rat?
ps.: aha, wenn ich "char xxx[30];" auf "char xxx[10];" umdeklariere, funktioniert wieder alles wie gehabt. ich will ne gescheite programmiersprache!
Es ist echt zum ärgern, das Programm war am Wochenende eigentlich fast fertig, jetzt hab ich noch die GUI aufgehübscht, "String" Variablen hinzugefügt, und jetzt stürzt es bei Serial Read / Writes nach belieben hab... mache ich einen String / Char weg, läuft es wieder, mache ich einen dazu, stürzt es irgendwo anders ab.
Anscheinend wird der Speicher knapp, oder das Ding hat irgendwelche Probleme bei den String Operation. Jetzt müsste man die Internas von Arduino beherrschen
Hat jemand sowas schonmal gehabt und weiß Rat?
ps.: aha, wenn ich "char xxx[30];" auf "char xxx[10];" umdeklariere, funktioniert wieder alles wie gehabt. ich will ne gescheite programmiersprache!
Zuletzt bearbeitet:
Was Gummibärchen so alles bewirken können - tausend Dank für die nette Überraschung, Altix!
Damit sind wir wieder "alive and kicking": Das obige Problem war tatsächlich ein klassisches "out of memory" Thema. Das Ding hat 2500 Byte SRAM? Da wundert's nicht mehr, dass die Strings schon mehr Speicher brauchen, als verfügbar
Und hier ist nun der Spoiler

http://vimeo.com/86790293
(damit der video geht, den link nochmal per hand laden. keine ahnung, warum)
Damit sind wir wieder "alive and kicking": Das obige Problem war tatsächlich ein klassisches "out of memory" Thema. Das Ding hat 2500 Byte SRAM? Da wundert's nicht mehr, dass die Strings schon mehr Speicher brauchen, als verfügbar
Und hier ist nun der Spoiler
http://vimeo.com/86790293
(damit der video geht, den link nochmal per hand laden. keine ahnung, warum)
Zuletzt bearbeitet:
Wirklich sehr schön - das wäre mal ein lohnendes Winterprojekt. Dummerweise ist der Winter schon fast vorbei und der Fluggerätebau drängt sich unaufhaltsam in den Vordergrund...
Ich steuere meine (manuell aufgenommenen) Messreihen übrigens in Stufen an, mit kurzer Verweildauer auf einer bestimmten Gasstellung zum Stabilisieren. Das nimmt viel Subjektivität beim Ablesen der Kurven aus dem Spiel und erlaubt auch eine Art graphische Mittelwertbildung. Mangels Automatisierung kann ich im Moment nur feste PWM-Werte anfahren. Mit einem kleinen PID-Regler könnte Deine Ausbaustufe aber vermutlich ganz einfach bestimmte Schub-Stufen anfahren und so ein ungeahntes Maß an Vergleichbarkeit erreichen.
Ich steuere meine (manuell aufgenommenen) Messreihen übrigens in Stufen an, mit kurzer Verweildauer auf einer bestimmten Gasstellung zum Stabilisieren. Das nimmt viel Subjektivität beim Ablesen der Kurven aus dem Spiel und erlaubt auch eine Art graphische Mittelwertbildung. Mangels Automatisierung kann ich im Moment nur feste PWM-Werte anfahren. Mit einem kleinen PID-Regler könnte Deine Ausbaustufe aber vermutlich ganz einfach bestimmte Schub-Stufen anfahren und so ein ungeahntes Maß an Vergleichbarkeit erreichen.
Martinez, danke Dir.
Hornet, da ist die Frage, wieviel das das anfahren und verweilen bringt. Ich verstehe Dich so, dass damit Deine Messwerte eine vorgebene Rasterung bekommen und die Werte etwas verlässlicher werden, weil sich der Verbrauch einpendelt, wenn man verweilt.
Zum einen ist das aber programmtechnisch nicht ganz einfach abbildbar, man weiss ja vorher nicht, wieviel Schub man mit der Kombi fahren kann. Man könnte die Schubstufen vorgeben und über die PWM-Zahl vergleichen, wo man schon ist. Aber ehrlich, ich hatte mal am Anfang kurz mit der Stromzange geschaut, das waren bei 8A so 0,2A, die der Verbrauch dann wieder zurückläuft. Und dann fängt der Verbrauch auch an zu oszillieren, also müsste man da wiederum einen Mittelwert bilden. Neben den 0,2A kommen ja noch andere Ungenauigkeiten dazu, wie z.B. die komisch skalierenden Stromsensoren, etc. - siehe auch Zerosights Beitrag. D.h. den Absolutwert der Messung darf man jetzt nicht zu genau nehmen. Ziel ist eher die Vergleichbarkeit, die verschiedenen Setups nebeneinander halten zu können, um dann das bessere finden zu können.
Bis ich den PID-Controller da reinkopiert und ans laufen gebracht habe, bin ich bestimmt auch wieder zwei Wochen unterwegs. Hab erst mit dem Projekt Arduino programmieren gelernt, den Code dürfte ich eigentlich gar nicht herzeigen
Hornet, da ist die Frage, wieviel das das anfahren und verweilen bringt. Ich verstehe Dich so, dass damit Deine Messwerte eine vorgebene Rasterung bekommen und die Werte etwas verlässlicher werden, weil sich der Verbrauch einpendelt, wenn man verweilt.
Zum einen ist das aber programmtechnisch nicht ganz einfach abbildbar, man weiss ja vorher nicht, wieviel Schub man mit der Kombi fahren kann. Man könnte die Schubstufen vorgeben und über die PWM-Zahl vergleichen, wo man schon ist. Aber ehrlich, ich hatte mal am Anfang kurz mit der Stromzange geschaut, das waren bei 8A so 0,2A, die der Verbrauch dann wieder zurückläuft. Und dann fängt der Verbrauch auch an zu oszillieren, also müsste man da wiederum einen Mittelwert bilden. Neben den 0,2A kommen ja noch andere Ungenauigkeiten dazu, wie z.B. die komisch skalierenden Stromsensoren, etc. - siehe auch Zerosights Beitrag. D.h. den Absolutwert der Messung darf man jetzt nicht zu genau nehmen. Ziel ist eher die Vergleichbarkeit, die verschiedenen Setups nebeneinander halten zu können, um dann das bessere finden zu können.
Bis ich den PID-Controller da reinkopiert und ans laufen gebracht habe, bin ich bestimmt auch wieder zwei Wochen unterwegs. Hab erst mit dem Projekt Arduino programmieren gelernt, den Code dürfte ich eigentlich gar nicht herzeigen
Hornet, da ist die Frage, wieviel das das anfahren und verweilen bringt. Ich verstehe Dich so, dass damit Deine Messwerte eine vorgebene Rasterung bekommen und die Werte etwas verlässlicher werden, weil sich der Verbrauch einpendelt, wenn man verweilt.
Die Schubstufen haben aber den Nachteil, das man damit schlecht Props unter wirklich gleichen Bedinungen vergleichen kann, da sich bei gleichem PWM-Wert logischerweise ganz unterschiedliche Schübe einstellen.
Zum einen ist das aber programmtechnisch nicht ganz einfach abbildbar, man weiss ja vorher nicht, wieviel Schub man mit der Kombi fahren kann.
D.h. den Absolutwert der Messung darf man jetzt nicht zu genau nehmen. Ziel ist eher die Vergleichbarkeit, die verschiedenen Setups nebeneinander halten zu können, um dann das bessere finden zu können.
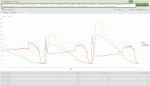
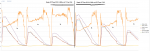
Edit: Bilder einer manuellen Messung angehängt. Das erste zeigt 5 PWM-Stufen a 40%, das zweite einen manuell auf 500g eingeregelten Schub.


Zuletzt bearbeitet:
Hey Mic, vielen Dank Dir. Und vielen Dank für Deine Props, schliesslich sind es die, die hier kreisen. In die T-Props hab ich eingeritzt, welche Testläufe die schon absolviert haben, dann müssen wir uns das nicht aufschreiben. Gut, oder?
Hornet: Du hast da ja so Spikes vor jedem Treppchen. Jetzt weiss ich auch, was Du meinst. Nachdem ich bei mir mit ziemlich geringer Rate sample, treten solche Spikes hier nicht weiter in Erscheinung. Hier wäre es bestimmt schön, mit höherer Rate zu sampeln, aber das steht gerade nicht im Vordergrund.
Altix, nochmal vielen Dank für die Gummitiere. Sie sind jetzt weg.
Nachdem ich seit 20:00 fleißig Props anmontiere, abmontiere, Messwerte kopiere, etc. (glaub das nennt man "testen bis die Finger bluten"), kann ich euch jetzt endlich ein paar Ergebnisse zeigen.
[An der Stelle möchte ich auch mal bei allen denen bedanken, die die letzten zwei Jahren ihre Infos hier reingestellt haben (Roberto, Ferdl, ninjamic und alle 1000 anderen) oder im Hintergrund mitgearbeitet haben (danke Admins), oder immer wieder andere Sachen einbringen (danke Starter, skyfreak, etc). Ohne euch hätte ich mir bestimmt nicht die Arbeit gemacht].
Anmerkung:
- Alles mit der heissen Nadel gestrickt. Wenn ich eine Million Fehler eingebaut hab, ja mei, ist halt so.
- Ich teste hier mit meinem Setup und nach meinen Interessen. Das muss nicht für jeden passen, wenn es für jemanden passt, ist das richtig geil (siehe auch icke&er).
Hintergrund:
Was mich hauptsächlich interessierte, war der Vergleich Single-Antrieb zu Koax, also kein V zu X, sondern einfacher Motor+Prop gegenüber doppelter Motor+Prop (oben und unten). Warum? Weil das Szenario ist "Was bringt mir die zweite Rotorebene?"
Die Testläufe hier/heute haben immer den RCTimer 5010-14 360kv. Keine Ahnung, wie sich das mit anderen Motoren verhält.
So, here we go:
- Koax bringt in den Tests hier nie(!) mehr Effizienz.
- Der Prop entscheidet maßgeblich, ob der Koax überhaupt irgendetwas bringt:
- Der T-Prop 15x5 ist ein super Single Prop, und, im Gegensatz zu den anderen Testobjekten, auch ein superber Koax-Prop.
- Den RCTimer 17x5.5 kann man als Koax-Prop getrost in die Tonne treten.
Ergebnisse der Einzeltests:
-------------------------
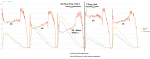
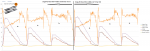
Gegenüberstellung vom RCTimer Prop 17x5.5 als Single zu Koax
- Der Koax braucht immens mehr Strom, produziert aber nicht mehr Schub
- Der Pusher erzielt kaum Schub
- Der Stromverbrauch oben/unten ist unausgeglichen
Vergleich Single RCTimer Prop 17x5.5 mit T-Prop 15.5
- Der T-Prop erzielt in der Single-Konfiguration mit zwei Zoll weniger annähernd den gleichen Schub
- Aber mit einer deutlich besseren Effizienz
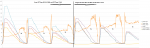
Vergleich Koax RCTimer Prop 17x5.5 zu Koax T-Prop 15.5
- Der T-Prop in der Koax-Konfig skaliert hammermäßig nach oben, was den Schub angeht.
- Dabei bleibt seine Effizienz nur gering unterhalb der Single-Konfig ab.
- Und ist damit tatsächlich der einzige Prop, der eine geile Koax-Konfig abgibt (verglichen als Koax mit RCTimer 17x5.5 und 16x5)
- Der RCTimer 17x5.5 ist als Koax, naja, unterirdisch.

Und jetzt zum Rest der Show
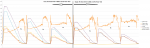
Der RCTimer 15x7.5 - ging wegen der Form nur als Single - im Vergleich zum T-Prop 15x5
- Überraschung: Der 15x7.5 ist mit seiner komischen Form sehr identisch im Ergebnis zum T-Prop!
- Etwas geringerer Schub, aber leicht bessere Effizienz.
- Beide sind akustisch ähnlich unauffällig, der T-Prop zeigt noch einen Hauch weniger Sound / mehr Säuseln.
- Leider ging der 15x7.5 nicht als Koax. Da muss ich mir noch was basteln.
- Also super Kandidat für kleineres Budget.
Der RCTimer 16x5 als Single - im Vergleich zum Single RCTimer 15x7.5
- Etwas mehr Schub als der 15x7.5, aber ein Stückerl schlechtere Effizienz.

Der RCTimer 16x5 in der Gegenüberstellung als Single zu Koax
- Der Schub skaliert schön, zieht aber den Verbrauch gleich hinterher
- Wertemäßig immensiv besser als der Koax 17x5.5, aber auch nicht gleichauf zum T-Prop 15x5
- Ninjamic hat den mit der Naza nicht fliegbar bekommen (Mic, bitte ggf. korrigieren)
- Zeigt nochmal, dass es wohl nicht selbstversändlich ist, dass ein Prop als Koax geeignet ist.
Damit gibt es nun auch den Code von der PropBench. Hoffe auf rege Beteiligung und wünsche fröhliches Testen. ACHTUNG, das ist BLOODY ALPHA CODE! Immer schön in Deckung gehen und bitte die Schnittschutz-Vollmontur vorher anlegen.) Ich übernehme für nix, nüscht, zero, null, garnix Garantie.
www.fdings.de/img/PropBench/PropBench_v0.06.zip
Happy Testing,
Olli
Hornet: Du hast da ja so Spikes vor jedem Treppchen. Jetzt weiss ich auch, was Du meinst
. Nachdem ich bei mir mit ziemlich geringer Rate sample, treten solche Spikes hier nicht weiter in Erscheinung. Hier wäre es bestimmt schön, mit höherer Rate zu sampeln, aber das steht gerade nicht im Vordergrund.Altix, nochmal vielen Dank für die Gummitiere. Sie sind jetzt weg
.Nachdem ich seit 20:00 fleißig Props anmontiere, abmontiere, Messwerte kopiere, etc. (glaub das nennt man "testen bis die Finger bluten"), kann ich euch jetzt endlich ein paar Ergebnisse zeigen.
[An der Stelle möchte ich auch mal bei allen denen bedanken, die die letzten zwei Jahren ihre Infos hier reingestellt haben (Roberto, Ferdl, ninjamic und alle 1000 anderen) oder im Hintergrund mitgearbeitet haben (danke Admins), oder immer wieder andere Sachen einbringen (danke Starter, skyfreak, etc). Ohne euch hätte ich mir bestimmt nicht die Arbeit gemacht].
Anmerkung:
- Alles mit der heissen Nadel gestrickt. Wenn ich eine Million Fehler eingebaut hab, ja mei, ist halt so.
- Ich teste hier mit meinem Setup und nach meinen Interessen. Das muss nicht für jeden passen, wenn es für jemanden passt, ist das richtig geil (siehe auch icke&er).
Hintergrund:
Was mich hauptsächlich interessierte, war der Vergleich Single-Antrieb zu Koax, also kein V zu X, sondern einfacher Motor+Prop gegenüber doppelter Motor+Prop (oben und unten). Warum? Weil das Szenario ist "Was bringt mir die zweite Rotorebene?"
Die Testläufe hier/heute haben immer den RCTimer 5010-14 360kv. Keine Ahnung, wie sich das mit anderen Motoren verhält.
So, here we go:
- Koax bringt in den Tests hier nie(!) mehr Effizienz.
- Der Prop entscheidet maßgeblich, ob der Koax überhaupt irgendetwas bringt:
- Der T-Prop 15x5 ist ein super Single Prop, und, im Gegensatz zu den anderen Testobjekten, auch ein superber Koax-Prop.
- Den RCTimer 17x5.5 kann man als Koax-Prop getrost in die Tonne treten.
Ergebnisse der Einzeltests:
-------------------------
Gegenüberstellung vom RCTimer Prop 17x5.5 als Single zu Koax
- Der Koax braucht immens mehr Strom, produziert aber nicht mehr Schub
- Der Pusher erzielt kaum Schub
- Der Stromverbrauch oben/unten ist unausgeglichen
Vergleich Single RCTimer Prop 17x5.5 mit T-Prop 15.5
- Der T-Prop erzielt in der Single-Konfiguration mit zwei Zoll weniger annähernd den gleichen Schub
- Aber mit einer deutlich besseren Effizienz
Vergleich Koax RCTimer Prop 17x5.5 zu Koax T-Prop 15.5
- Der T-Prop in der Koax-Konfig skaliert hammermäßig nach oben, was den Schub angeht.
- Dabei bleibt seine Effizienz nur gering unterhalb der Single-Konfig ab.
- Und ist damit tatsächlich der einzige Prop, der eine geile Koax-Konfig abgibt (verglichen als Koax mit RCTimer 17x5.5 und 16x5)
- Der RCTimer 17x5.5 ist als Koax, naja, unterirdisch.
Und jetzt zum Rest der Show
Der RCTimer 15x7.5 - ging wegen der Form nur als Single - im Vergleich zum T-Prop 15x5
- Überraschung: Der 15x7.5 ist mit seiner komischen Form sehr identisch im Ergebnis zum T-Prop!
- Etwas geringerer Schub, aber leicht bessere Effizienz.
- Beide sind akustisch ähnlich unauffällig, der T-Prop zeigt noch einen Hauch weniger Sound / mehr Säuseln.
- Leider ging der 15x7.5 nicht als Koax. Da muss ich mir noch was basteln.
- Also super Kandidat für kleineres Budget.
Der RCTimer 16x5 als Single - im Vergleich zum Single RCTimer 15x7.5
- Etwas mehr Schub als der 15x7.5, aber ein Stückerl schlechtere Effizienz.
Der RCTimer 16x5 in der Gegenüberstellung als Single zu Koax
- Der Schub skaliert schön, zieht aber den Verbrauch gleich hinterher
- Wertemäßig immensiv besser als der Koax 17x5.5, aber auch nicht gleichauf zum T-Prop 15x5
- Ninjamic hat den mit der Naza nicht fliegbar bekommen (Mic, bitte ggf. korrigieren)
- Zeigt nochmal, dass es wohl nicht selbstversändlich ist, dass ein Prop als Koax geeignet ist.
Damit gibt es nun auch den Code von der PropBench. Hoffe auf rege Beteiligung und wünsche fröhliches Testen. ACHTUNG, das ist BLOODY ALPHA CODE! Immer schön in Deckung gehen und bitte die Schnittschutz-Vollmontur vorher anlegen.
) Ich übernehme für nix, nüscht, zero, null, garnix Garantie.www.fdings.de/img/PropBench/PropBench_v0.06.zip
Happy Testing,
Olli
Zuletzt bearbeitet:
Coole Sache, der Vergleich, trotz leicher messstrategischer Schwächen . Ein Jammer, dass die 15x7.5 so eine blöde Kröpfung in der Mitte haben - darüber habe ich auch schon geflucht.
Nein, das ist nicht das Problem. Die Spikes am Anfang kommen nur durch das schlagartige Gasgeben beim Umschalten und die Prop-Trägheit in Verbindung mit einem sehr sehr guten und niederohmigen Akku. Bezüglich der Samplingrate machst Du übrigens einen Denkfehler: Undersampling ist keine Mittelwertbildung und damit auch kein Tiefpass. Du vergößerst damit nur das "Rauschen" und den Messfehler.
Aber trotzdem ist diese Messung schon mal super, um die Props untereinander grob einordnen zu können!
Ich habe hier übrigens einen weiteren 16er Proptyp von RCTimer: http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=923&productname=
Die sind im Originalzustand leider eine Luftbremse, da unmögliche Nasen- und Endleistengeometrie, aber mit etwas Nacharbeit bringen sie bei mir 1,2kg am 5010 mit 4s @ 161W oder 1kg @ 127W. Wenn Du noch Lust auf weitere Messreihen hast, würde ich mich heut abend mal hinsetzen und ein Paar zuschleifen und Dir das mal schicken.
PS.: die unterschiedlichen Zellenzahlen wären besser vergleichbar, wenn man die Leistung anstatt des Stroms plottet - sorry fürs erneute Klugsch...
. Ein Jammer, dass die 15x7.5 so eine blöde Kröpfung in der Mitte haben - darüber habe ich auch schon geflucht.
Hornet: Du hast da ja so Spikes vor jedem Treppchen. Jetzt weiss ich auch, was Du meinst . Nachdem ich bei mir mit ziemlich geringer Rate sample, treten solche Spikes hier nicht weiter in Erscheinung. Hier wäre es bestimmt schön, mit höherer Rate zu sampeln, aber das steht gerade nicht im Vordergrund.
Aber trotzdem ist diese Messung schon mal super, um die Props untereinander grob einordnen zu können!
Ich habe hier übrigens einen weiteren 16er Proptyp von RCTimer: http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=923&productname=
Die sind im Originalzustand leider eine Luftbremse, da unmögliche Nasen- und Endleistengeometrie, aber mit etwas Nacharbeit bringen sie bei mir 1,2kg am 5010 mit 4s @ 161W oder 1kg @ 127W. Wenn Du noch Lust auf weitere Messreihen hast, würde ich mich heut abend mal hinsetzen und ein Paar zuschleifen und Dir das mal schicken.
PS.: die unterschiedlichen Zellenzahlen wären besser vergleichbar, wenn man die Leistung anstatt des Stroms plottet - sorry fürs erneute Klugsch...
Zuletzt bearbeitet:
Coole Sache, der Vergleich, trotz leicher messstrategischer Schwächen . ... Bezüglich der Samplingrate machst Du übrigens einen Denkfehler: Undersampling ist keine Mittelwertbildung und damit auch kein Tiefpass. Du vergößerst damit nur das "Rauschen" und den Messfehler.
. ... Bezüglich der Samplingrate machst Du übrigens einen Denkfehler: Undersampling ist keine Mittelwertbildung und damit auch kein Tiefpass. Du vergößerst damit nur das "Rauschen" und den Messfehler.
) Ich hatte schon vermutet, dass da etwas hinherkommt - vielen Dank für die konstruktive Kritik.
Ein Jammer, dass die 15x7.5 so eine blöde Kröpfung in der Mitte haben - darüber habe ich auch schon geflucht.
Nein, das ist nicht das Problem. Die Spikes am Anfang kommen nur durch das schlagartige Gasgeben beim Umschalten und die Prop-Trägheit in Verbindung mit einem sehr sehr guten und niederohmigen Akku.
Ich habe hier übrigens einen weiteren 16er Proptyp von RCTimer: http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=923&productname=
Die sind im Originalzustand leider eine Luftbremse, da unmögliche Nasen- und Endleistengeometrie, aber mit etwas Nacharbeit bringen sie bei mir 1,2kg am 5010 mit 4s @ 161W oder 1kg @ 127W. Wenn Du noch Lust auf weitere Messreihen hast, würde ich mich heut abend mal hinsetzen und ein Paar zuschleifen und Dir das mal schicken.
Die sind im Originalzustand leider eine Luftbremse, da unmögliche Nasen- und Endleistengeometrie, aber mit etwas Nacharbeit bringen sie bei mir 1,2kg am 5010 mit 4s @ 161W oder 1kg @ 127W. Wenn Du noch Lust auf weitere Messreihen hast, würde ich mich heut abend mal hinsetzen und ein Paar zuschleifen und Dir das mal schicken.
PS.: die unterschiedlichen Zellenzahlen wären besser vergleichbar, wenn man die Leistung anstatt des Stroms plottet
Dann schau Dir mal lieber nicht den Code an ;-)Hi Olli, erstmal danke für die Arbeit die Du dir hier machst. Super cooles Projekt.
Da ich zur Zeit überlege eine X8 mit diesen Motoren auf zu bauen ist das für mich natürlich noch interessanter.
Ich hätte aber noch eine Bitte könntest Du die Daten von den Singel-Anordnungen mal zwei nehmen und mit den Koax vergleichen?
Das würde ein Vergleich erleichtern ob man mit dem Verlust leben kann, oder man sich doch lieber ein Flat aufbaut.
Liebe Grüße
Basti
Da ich zur Zeit überlege eine X8 mit diesen Motoren auf zu bauen ist das für mich natürlich noch interessanter.
Ich hätte aber noch eine Bitte könntest Du die Daten von den Singel-Anordnungen mal zwei nehmen und mit den Koax vergleichen?
Das würde ein Vergleich erleichtern ob man mit dem Verlust leben kann, oder man sich doch lieber ein Flat aufbaut.
Liebe Grüße
Basti
Hehe, gerne, faule Eier in meine Richtung ) Ich hatte schon vermutet, dass da etwas hinherkommt - vielen Dank für die konstruktive Kritik.
) Ich hatte schon vermutet, dass da etwas hinherkommt - vielen Dank für die konstruktive Kritik.
Ja. Interessant finde ich, dass so eine unterschiedliche Form und Steigung so gleiche Ergebnisse wie der T-Prop. Bzw. wie Tiger das hinbekommt, aus einem augenscheinlich so flachen Profil soviel zu herauszuholen.
Ähem, würde es Dir was ausmachen, das etwas detaillierter zu erklären, das würde ich gerne verstehen. Du reißt quasi "das Gas auf", der Stromverbrauch ist beim Beschleunigen höher als der Verbrauch zur "Umdrehungserhaltung" bei Erreichen der Zieldrehzahl, und der Akku kann den benötigten Strom auch bereitstellen? Was bedeutet hier "guter und niederohmiger Akku", dass er die Strommenge bereitstellen kann, oder dass er so sie so schnell bereitstellen kann?
Paket ist fast fertig gepackt...
Basti, was meinst Du mit "mal zwei nehmen"? Den Schub aus den Graphen kannst du x100 nehmen, dann hast du den Schub in Gramm. Alle anderen Daten kann man direkt aus den Graphen ablesen. Ich hänge heute abend mal die Rohdaten dran, dann kann sich das jeder nach Belieben umrechnen.
Ich bin kein Fan des Vergleiches "Ich will Copter mit X Antrieben bauen, ist flat oder Koax besser": Das vernachlässigt die Realität, dass der Copter nur einen beschränkten Platz zur Verfügung hat. Die Frage des Antriebs ist dann nachrangig und unterliegt Schubbedarf und anderen Aspekten. Ein Koax wird nie den Wirkungsgrad eines Doppelflats erreichen, den Vergleich was davon besser ist, kann man sich sparen.
Ich bin kein Fan des Vergleiches "Ich will Copter mit X Antrieben bauen, ist flat oder Koax besser": Das vernachlässigt die Realität, dass der Copter nur einen beschränkten Platz zur Verfügung hat. Die Frage des Antriebs ist dann nachrangig und unterliegt Schubbedarf und anderen Aspekten. Ein Koax wird nie den Wirkungsgrad eines Doppelflats erreichen, den Vergleich was davon besser ist, kann man sich sparen.
Hi Olli, das mit dem mal zwei nehmen wollte ich haben um besser Koax gegen Flat vergleichen zu können. Mit dem Bereitstellen der Rohdaten hat sich das natürlich erledigt.
Ich bin auch der Meinung eine pauschale Aussage ob Koax oder Flat besser ist gibt es nicht.
Was deine aufgezeichneten Daten aber zeigen das es massive Unterschiede bei den Props hinsichtlich ihrer Koaxtauglichkeit gibt. Mit den Graphen ist es nun aber zumindest theoretisch möglich die Effizienzunterschiede für einen 3,5 kg Okto-Flat oder X8 zu errechnen.(Wobei natürlich der Flat auf Grund der 4 zusätzlichen Arme und des größeren Motorradius schwerer ausfallen würde)
Ich bin auch der Meinung eine pauschale Aussage ob Koax oder Flat besser ist gibt es nicht.
Was deine aufgezeichneten Daten aber zeigen das es massive Unterschiede bei den Props hinsichtlich ihrer Koaxtauglichkeit gibt. Mit den Graphen ist es nun aber zumindest theoretisch möglich die Effizienzunterschiede für einen 3,5 kg Okto-Flat oder X8 zu errechnen.(Wobei natürlich der Flat auf Grund der 4 zusätzlichen Arme und des größeren Motorradius schwerer ausfallen würde)
Mich würde auch mal interessieren ob es einen Unterschied macht ob der Coax gleich- oder gegensinnig dreht.
Der softwarelink führt zu einer Herzlichen Glückwunsch Seite ???
Zu Beginn habe ich auf einer Küchenwaage gemessen und dann alle Anzeigen fotografiert um später in Ruhe die Daten in eine Tabelle eintragen zu können. Dafür bekam ich aber Kritik weil bei der von mir verwendeten Anordnung ein Teil des Windes auf die Waage drückte und somit sicher nicht mit gemessen wurde.
So habe ich mir meinen jetzigen Prüfstand gebaut. [video=youtube;xSZ2Ubt1B2o]http://www.youtube.com/watch?v=xSZ2Ubt1B2o[/video]
Ein Arduino sendet die Servoimpulse oder I2C zu dem Regler, misst Spannung, Strom, Drehzahl, Schub. Vibration wollte ich auch noch realisieren habe da aber nocht keine geeignete Methode gefunden. Die Werte habe ich dann auf den PC mit Processing übertragen und anzeigen lassen. Eine Übergabe an Exel ist mir damit noch nicht gelungen.
Inzwischen starte ich die Tests aus einer Exel tabelle direkt . [video=youtube;lJYMy3XCLKw]http://www.youtube.com/watch?v=lJYMy3XCLKw[/video]
Dahin werden auch die Daten übertragen und ich kann dann daraus entsprechende Grafiken erstellen. Ich mache sozusagen Stufentests indem ich Servoimpulse immer 50ms erhöhe dann kurz warte bis der Motor die Drehzahl erreicht hat und dann mehrfach messe um für die Impulslänge jeweils einen Durchschnitt zu mitteln.
Ich hätte interresse an einer fusion der Ideen und einer gescheiten Software die das dann auswertet.
Ich benutzte ein Stabilisiertes Netzteil eingestellt auf 12V bis 40A so denke ich lässt sich ein Test besser reproduzieren als mit einem Akku.
Der softwarelink führt zu einer Herzlichen Glückwunsch Seite ???
Zu Beginn habe ich auf einer Küchenwaage gemessen und dann alle Anzeigen fotografiert um später in Ruhe die Daten in eine Tabelle eintragen zu können. Dafür bekam ich aber Kritik weil bei der von mir verwendeten Anordnung ein Teil des Windes auf die Waage drückte und somit sicher nicht mit gemessen wurde.
So habe ich mir meinen jetzigen Prüfstand gebaut. [video=youtube;xSZ2Ubt1B2o]http://www.youtube.com/watch?v=xSZ2Ubt1B2o[/video]
Ein Arduino sendet die Servoimpulse oder I2C zu dem Regler, misst Spannung, Strom, Drehzahl, Schub. Vibration wollte ich auch noch realisieren habe da aber nocht keine geeignete Methode gefunden. Die Werte habe ich dann auf den PC mit Processing übertragen und anzeigen lassen. Eine Übergabe an Exel ist mir damit noch nicht gelungen.
Inzwischen starte ich die Tests aus einer Exel tabelle direkt . [video=youtube;lJYMy3XCLKw]http://www.youtube.com/watch?v=lJYMy3XCLKw[/video]
Dahin werden auch die Daten übertragen und ich kann dann daraus entsprechende Grafiken erstellen. Ich mache sozusagen Stufentests indem ich Servoimpulse immer 50ms erhöhe dann kurz warte bis der Motor die Drehzahl erreicht hat und dann mehrfach messe um für die Impulslänge jeweils einen Durchschnitt zu mitteln.
Ich hätte interresse an einer fusion der Ideen und einer gescheiten Software die das dann auswertet.
Ich benutzte ein Stabilisiertes Netzteil eingestellt auf 12V bis 40A so denke ich lässt sich ein Test besser reproduzieren als mit einem Akku.
- Status
- Nicht offen für weitere Antworten.

