Hallo AQ Gemeinde
Als Naza Pilot wollte ich mal was neues und habe meine WK Bestellung storniert.
Jetzt habe ich bissel was zu tun und hoffe ihr hilft mir bei anstehenden Problemen.
Ich fliege mit Hott und habe deshalb auch die Firmware fürs SUMD installiert.
Auch das Ground Control vom Franzosen, Verkabelung nach seiner Vorgabe und alles funzt bisher tiptop.
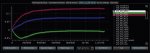
Servoausschläge werden angezeigt, mein AQ liegt im Gefrierer und der 3te Kalibriervorgang steht nächstens an.
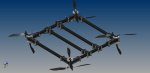
Mein Octo soll 8x 5010 360kv Motoren befeuern mit den HK 40A Blue Series Props.
Die Regler möchte ich umflashen mit einem umgeschriebenen SimonK Setting, so dass der Regler einen Freilauf besitzt. Dazu hoffe ich auf das Fachwissen eines Schweizer ETH Studenten.

Da ich keinen Bock auf runde Rohre habe, schmiss ich kurzerhand meinen Compi an und fräste Formen für SW 26mm 8kt Rohre.

Meine aktuellen Rohre wiegen 64 Gramm bei einer Länge von 1050mm. Gewebeanteil 47 Gramm.. Denke mal das ist ein super Wert. Stabilitätsmässig sind die Dinger saufest. Habe auch Rohre mit UHM-Rovings. Aber die sehen halt nicht so geil aus
Probiere als nächstens Rohre mit Rovings und aussen die schöne gewobene Struktur.
Möchte später Steckungsaufnahme erstellen mit gleichzeitiger Stromverbindung. Einstecken, fertig.
Die Copterkonstruktion ist noch am entstehen, später soll noch per FEM nachgeschaut werden wo Material weg darf. Da bin ich sehr gut ausgerüstet.
Für die Stromversorgung dachte ich mir folgendes:
Der Autoquad verträgt ja maximal 5S und ich möchte mit 6S fliegen.
Ich packe 2 Stck. 6S Lipos auf den Copter. Nehme 2 Stck. externe BEC, speise damit eine Akkuweiche von ACT und speise dadurch meinen AQ. Die Motoren natürlich abwechseln mit je Akku 1, der nächste Akku 2.
Sollte mal die eine Hälfte total ausfallen, habe ich immer noch 4 Motoren.
Jetzt zu meiner Sorge: Wie bekomme ich das ganze elektronisch einigermassen gebacken? Eigentlich könnte ich ja jeweils die internen BEC der Regler nehmen, aber die liefern "nur" 5.5 Volt.
Hat schon jemand von euch einen 6S Copter mit AQ gebaut?
Die Stromüberwachung kann ich leider auch nicht nehmen.
Hat schon jemand von euch beim Kalibrieren den gekühlten AQ in eine geheizte Kiste gesteckt? Hardcore von -20 auf +40 Grad hoch. Sonst gekomme ich im Keller kaum mehr als +15 Grad hin.
Unten dran soll ein 3 Achs Gimbal kommen mit meiner Sony RX1 Cam.
Auch die 5010er RC-Timer Motoren aber als Servo...
Das 3DRobotics 3DR Radio Telemetry Kit 433Mhz sollte auf dem Weg zu mir sein. 5,8ghz habe ich, jedoch würde ich lieber mein 2,4ghz Videozeugs nehmen. Aber mir ist kein Modus vom AQ bekannt, der die Signale vom Scherrer oder EZUHF unterstützt. Gibts da einen brauchbaren PPM Modus?
Also wie ihr seht steht noch viel Arbeit an, aber das kriege ich schon hin. Hoffe ihr unterstützt mich dabei ein wenig.
Heute Abend sollte ich die Logfiles der statischen Kalibration fertig haben.
Netten Gruss
Roman
Als Naza Pilot wollte ich mal was neues und habe meine WK Bestellung storniert.
Jetzt habe ich bissel was zu tun und hoffe ihr hilft mir bei anstehenden Problemen.
Ich fliege mit Hott und habe deshalb auch die Firmware fürs SUMD installiert.
Auch das Ground Control vom Franzosen, Verkabelung nach seiner Vorgabe und alles funzt bisher tiptop.
Servoausschläge werden angezeigt, mein AQ liegt im Gefrierer und der 3te Kalibriervorgang steht nächstens an.
Mein Octo soll 8x 5010 360kv Motoren befeuern mit den HK 40A Blue Series Props.
Die Regler möchte ich umflashen mit einem umgeschriebenen SimonK Setting, so dass der Regler einen Freilauf besitzt. Dazu hoffe ich auf das Fachwissen eines Schweizer ETH Studenten.
Da ich keinen Bock auf runde Rohre habe, schmiss ich kurzerhand meinen Compi an und fräste Formen für SW 26mm 8kt Rohre.
Meine aktuellen Rohre wiegen 64 Gramm bei einer Länge von 1050mm. Gewebeanteil 47 Gramm.. Denke mal das ist ein super Wert. Stabilitätsmässig sind die Dinger saufest. Habe auch Rohre mit UHM-Rovings. Aber die sehen halt nicht so geil aus
Probiere als nächstens Rohre mit Rovings und aussen die schöne gewobene Struktur.
Möchte später Steckungsaufnahme erstellen mit gleichzeitiger Stromverbindung. Einstecken, fertig.
Die Copterkonstruktion ist noch am entstehen, später soll noch per FEM nachgeschaut werden wo Material weg darf. Da bin ich sehr gut ausgerüstet.
Für die Stromversorgung dachte ich mir folgendes:
Der Autoquad verträgt ja maximal 5S und ich möchte mit 6S fliegen.
Ich packe 2 Stck. 6S Lipos auf den Copter. Nehme 2 Stck. externe BEC, speise damit eine Akkuweiche von ACT und speise dadurch meinen AQ. Die Motoren natürlich abwechseln mit je Akku 1, der nächste Akku 2.
Sollte mal die eine Hälfte total ausfallen, habe ich immer noch 4 Motoren.
Jetzt zu meiner Sorge: Wie bekomme ich das ganze elektronisch einigermassen gebacken? Eigentlich könnte ich ja jeweils die internen BEC der Regler nehmen, aber die liefern "nur" 5.5 Volt.
Hat schon jemand von euch einen 6S Copter mit AQ gebaut?
Die Stromüberwachung kann ich leider auch nicht nehmen.
Hat schon jemand von euch beim Kalibrieren den gekühlten AQ in eine geheizte Kiste gesteckt? Hardcore von -20 auf +40 Grad hoch. Sonst gekomme ich im Keller kaum mehr als +15 Grad hin.
Unten dran soll ein 3 Achs Gimbal kommen mit meiner Sony RX1 Cam.
Auch die 5010er RC-Timer Motoren aber als Servo...
Das 3DRobotics 3DR Radio Telemetry Kit 433Mhz sollte auf dem Weg zu mir sein. 5,8ghz habe ich, jedoch würde ich lieber mein 2,4ghz Videozeugs nehmen. Aber mir ist kein Modus vom AQ bekannt, der die Signale vom Scherrer oder EZUHF unterstützt. Gibts da einen brauchbaren PPM Modus?
Also wie ihr seht steht noch viel Arbeit an, aber das kriege ich schon hin. Hoffe ihr unterstützt mich dabei ein wenig.
Heute Abend sollte ich die Logfiles der statischen Kalibration fertig haben.
Netten Gruss
Roman