
Mstrens hat vor kurzem sein GitHub Projekt online gestellt.
https://github.com/mstrens/expressLRS_oXs
Es ist etwas mühsam und zeitintensiv die Umgebung zu installieren. Hier eine Übersicht der erforderlichen Schritte:
- den Editor Visual Basic Code installieren
- in Visual Basic Code PlatformIO (unter Extensions) installieren
- GIT installieren: Git - Downloading Package
- Neustart
- Unter PlatformIO Wiz-IO installieren, das ist die Plattform, die mstrens benutzt https://github.com/Wiz-IO/wizio-pico
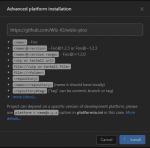
Das dauert wieder eine Weile, je nach Internet Verbindung.
- Ein neues Projekt in PlatformIO anlegen, mit der platform wizio-pico und dem Board pico-dap, die erforderlichen Daten werden dann gezogen und gespeichert
- mstrens Projekt als zip-Datei laden und entpacken
- dieses Projekt in PlatformIO öffnen
Ich musste dann das board = raspberry-mstrens aus der platformio.ini löschen und in der Projekt Konfiguration das Board pico-dab einsetzen, um erfolgreich kompilieren zu können.

Da meine Boards noch auf dem Weg ist, konnte ich noch nichts testen. Es gibt bei den Boards unter Wiz-IO noch eine zweite Möglichkeit, eventuell muss/kann man diese wählen:

Oder es benötigt tatsächlich die board = raspberry-mstrens Konfiguration, die ich aber nicht zum Laufen brachte. Ich vermute, mstrens hat hier eine eigene Board-Definition hinterlegt, aber wirklich verstehen tue ich den Punkt nicht.
Seiner Warnung, dass diese Umgebung komplizierter ist als die Arduino-IDE, mag ich nicht wirklich widersprechen")
https://github.com/mstrens/expressLRS_oXs
Es ist etwas mühsam und zeitintensiv die Umgebung zu installieren. Hier eine Übersicht der erforderlichen Schritte:
- den Editor Visual Basic Code installieren
- in Visual Basic Code PlatformIO (unter Extensions) installieren
- GIT installieren: Git - Downloading Package
- Neustart
- Unter PlatformIO Wiz-IO installieren, das ist die Plattform, die mstrens benutzt https://github.com/Wiz-IO/wizio-pico
Das dauert wieder eine Weile, je nach Internet Verbindung.
- Ein neues Projekt in PlatformIO anlegen, mit der platform wizio-pico und dem Board pico-dap, die erforderlichen Daten werden dann gezogen und gespeichert
- mstrens Projekt als zip-Datei laden und entpacken
- dieses Projekt in PlatformIO öffnen
Ich musste dann das board = raspberry-mstrens aus der platformio.ini löschen und in der Projekt Konfiguration das Board pico-dab einsetzen, um erfolgreich kompilieren zu können.
Da meine Boards noch auf dem Weg ist, konnte ich noch nichts testen. Es gibt bei den Boards unter Wiz-IO noch eine zweite Möglichkeit, eventuell muss/kann man diese wählen:
Oder es benötigt tatsächlich die board = raspberry-mstrens Konfiguration, die ich aber nicht zum Laufen brachte. Ich vermute, mstrens hat hier eine eigene Board-Definition hinterlegt, aber wirklich verstehen tue ich den Punkt nicht.
Seiner Warnung, dass diese Umgebung komplizierter ist als die Arduino-IDE, mag ich nicht wirklich widersprechen




