
OXSENS OpenXsensor Projekt für CRSF Protocol (RP2040)
- Themenstarter Carbonator
- Beginndatum
Ist denn geplant ggf nen Platinenlayout zu machen?
Das wäre schon geil. Nen 3.3 Reg mit drauf, dazu Platz für den RPi und nen CRSF/Tracer/Elrs aufzulöten. Dann die Servos rausgeführt mit + - Bus und Versorgung über ESC oder eigenem BEC. Dazu dann einen Vsense auf der Servo Rail.
Das Vario entweder mit drauf oder per Pins. Pins fürs GPS.
Das wäre schon geil. Nen 3.3 Reg mit drauf, dazu Platz für den RPi und nen CRSF/Tracer/Elrs aufzulöten. Dann die Servos rausgeführt mit + - Bus und Versorgung über ESC oder eigenem BEC. Dazu dann einen Vsense auf der Servo Rail.
Das Vario entweder mit drauf oder per Pins. Pins fürs GPS.
Eine Platine macht sicher Sinn. Hier hatte ich schon eine Version verlinkt. Das Thema entwickelt sich gerade sehr dynamisch. Wir haben übrigens hier im Forum auch Leute, die Platinen designen können, @Bussard z.B..
Ich hatte auch schon die Idee, den RP2040 nicht aufzulöten, sondern die Platine in U-Form zu machen und den RP in das U einzulöten. So reduziert man die Bauhöhe und kann das Vario und GPS besser integrieren. Keine Ahnung, ob PCB-Produzenten so etwas anbieten. Die äußeren Pins am RP machen das einfach, man bräuchte sie nur im "U" spiegeln.

Ich hatte auch schon die Idee, den RP2040 nicht aufzulöten, sondern die Platine in U-Form zu machen und den RP in das U einzulöten. So reduziert man die Bauhöhe und kann das Vario und GPS besser integrieren. Keine Ahnung, ob PCB-Produzenten so etwas anbieten. Die äußeren Pins am RP machen das einfach, man bräuchte sie nur im "U" spiegeln.
Just heute sind RP2040 bei mir angekommen, um das aus Interesse mal zu testen - nur die Zeit ist wie immer sehr knapp.
Da hatte ich die im Herbst erstellten Leiterplatten im Hinterkopf, die für OXS mit Arduino zur 3 oder 4 Zellen Einzelspannungsmessung gedacht waren, aber kleiner als der RP2040 sind, wenn man die Balancerkabel direkt anlötet und den Steckerbereich abschneidet. Dazu ist noch ein GPS-Vorwiderstand und wahlweise Lötpunkte oder Originalbuchse vorgesehen. Alles ungetestet (s.o.).
Auf dem Bild 6 Leiterplatten, der Hersteller wollte so klein nur gegen deutlichen Aufpreis trennen.
Da hatte ich die im Herbst erstellten Leiterplatten im Hinterkopf, die für OXS mit Arduino zur 3 oder 4 Zellen Einzelspannungsmessung gedacht waren, aber kleiner als der RP2040 sind, wenn man die Balancerkabel direkt anlötet und den Steckerbereich abschneidet. Dazu ist noch ein GPS-Vorwiderstand und wahlweise Lötpunkte oder Originalbuchse vorgesehen. Alles ungetestet (s.o.).
Auf dem Bild 6 Leiterplatten, der Hersteller wollte so klein nur gegen deutlichen Aufpreis trennen.
Anhänge
-
 1,7 MB Aufrufe: 71
1,7 MB Aufrufe: 71
Eine Platine macht sicher Sinn. Hier hatte ich schon eine Version verlinkt. Das Thema entwickelt sich gerade sehr dynamisch. Wir haben übrigens hier im Forum auch Leute, die Platinen designen können, @Bussard z.B..
Ich hatte auch schon die Idee, den RP2040 nicht aufzulöten, sondern die Platine in U-Form zu machen und den RP in das U einzulöten. So reduziert man die Bauhöhe und kann das Vario und GPS besser integrieren. Keine Ahnung, ob PCB-Produzenten so etwas anbieten. Die äußeren Pins am RP machen das einfach, man bräuchte sie nur im "U" spiegeln.
Ich hatte auch schon die Idee, den RP2040 nicht aufzulöten, sondern die Platine in U-Form zu machen und den RP in das U einzulöten. So reduziert man die Bauhöhe und kann das Vario und GPS besser integrieren. Keine Ahnung, ob PCB-Produzenten so etwas anbieten. Die äußeren Pins am RP machen das einfach, man bräuchte sie nur im "U" spiegeln.
Wichtig ist, dass der 3.3V bec bis sage mal 10V läuft, damit auch HV Setups gehen.
Das find ich Grütze an dem Matek Adapter… die haben da nen bec drauf für die Servos aber das limitiert extrem 🙁 und man kann das nicht von der Servo + Rail wegnehmen
Wir können ja mal ein paar Ideen sammeln. Vielleicht wäre ein 5V Regler sinnvoller. Damit könnte man den Empfänger und den RP2040 versorgen, der sich dann seine 3,3V erzeugt und damit Vario und GPS versorgt.
Sollte man auch einen Stromsensor vorsehen à la Matek? Man könnte auch nur den kleinen INA1x9 Verstärker vorsehen und den Shunt im Kabel platzieren. Dann bräuchte man nur eine dünne Leitung zur Platine führen. Das fände ich sehr flexibel, denn durch den Wert des Shunts kann man den Messbereich definieren. Alternativ kann man natürlich immer auch die "normalen" ACS Stromsensoren nutzen.
Sollte man auch einen Stromsensor vorsehen à la Matek? Man könnte auch nur den kleinen INA1x9 Verstärker vorsehen und den Shunt im Kabel platzieren. Dann bräuchte man nur eine dünne Leitung zur Platine führen. Das fände ich sehr flexibel, denn durch den Wert des Shunts kann man den Messbereich definieren. Alternativ kann man natürlich immer auch die "normalen" ACS Stromsensoren nutzen.
")
Wir können ja mal ein paar Ideen sammeln. Vielleicht wäre ein 5V Regler sinnvoller. Damit könnte man den Empfänger und den RP2040 versorgen, der sich dann seine 3,3V erzeugt und damit Vario und GPS versorgt.
Sollte man auch einen Stromsensor vorsehen à la Matek? Man könnte auch nur den kleinen INA1x9 Verstärker vorsehen und den Shunt im Kabel platzieren. Dann bräuchte man nur eine dünne Leitung zur Platine führen. Das fände ich sehr flexibel, denn durch den Wert des Shunts kann man den Messbereich definieren. Alternativ kann man natürlich immer auch die "normalen" ACS Stromsensoren nutzen.
Sollte man auch einen Stromsensor vorsehen à la Matek? Man könnte auch nur den kleinen INA1x9 Verstärker vorsehen und den Shunt im Kabel platzieren. Dann bräuchte man nur eine dünne Leitung zur Platine führen. Das fände ich sehr flexibel, denn durch den Wert des Shunts kann man den Messbereich definieren. Alternativ kann man natürlich immer auch die "normalen" ACS Stromsensoren nutzen.
Stromsensor, da bin ich bei deinem 2. Vorschlag. Lieber einen CUR Eingang, als das der Shunt auf den Xsense kommt. Je nach Modell, kanns ja eng werden und dann passt das am Ende nicht mit der Kabelführung.
BLheli32 ESC sprechen auch Smartport. Ein Smartport to CRSF converter wär also auch ne lustige Sache.
Ein Smartport to CRSF converter wär also auch ne lustige Sache.
Wen's intertessiert, ich habe mein Gehäuse für das Matek CRSF-PWM-C Board mit Receiver hochgeladen.
Printables
Gruß Gerd
Printables
Gruß Gerd
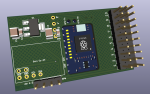
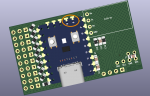
Wie hier SONSTIGE - Matek CRSF to PWM Decoder angekündigt, gibt es nun eine Platine für den RP2040-Zero von Waveshare mit einem ELRS Empfänger und optionalem Baro und GPS.
Als Baro sind GY-63 oder SPL06 möglich, GPS Beitian 180 oder 220. Beide werden auf der Oberseite montiert.
Der Empfänger kommt nach unten. Möglich sind Empfänger welche CRSF ausgeben, z. B. ELRS/Crossfire 900MHz, Tracer 2,4GHz oder alternativ SBus/SPort z. B. FrSky oder Jeti.
Die Spannungsversorgung der Elektronik übernimmt ein 5V Regler.
Statt der gerade herausstehenden Servo-Pins können auch abgewinkelte verwendet werden - dafür gibt es leider keine 3D Vorschau. Leider gibt es auch kein 3D Modell von Empfänger, Baro und GPS, deswegen ist hier Phantasie gefragt.
Das ganze wird sofort verständlich, wenn der Prototyp aufgebaut und wir Bilder präsentieren können.
Als Baro sind GY-63 oder SPL06 möglich, GPS Beitian 180 oder 220. Beide werden auf der Oberseite montiert.
Der Empfänger kommt nach unten. Möglich sind Empfänger welche CRSF ausgeben, z. B. ELRS/Crossfire 900MHz, Tracer 2,4GHz oder alternativ SBus/SPort z. B. FrSky oder Jeti.
Die Spannungsversorgung der Elektronik übernimmt ein 5V Regler.
Statt der gerade herausstehenden Servo-Pins können auch abgewinkelte verwendet werden - dafür gibt es leider keine 3D Vorschau. Leider gibt es auch kein 3D Modell von Empfänger, Baro und GPS, deswegen ist hier Phantasie gefragt.
Das ganze wird sofort verständlich, wenn der Prototyp aufgebaut und wir Bilder präsentieren können.
Anhänge
-
 277,3 KB Aufrufe: 48
277,3 KB Aufrufe: 48 -
 289 KB Aufrufe: 43
289 KB Aufrufe: 43
Zuletzt bearbeitet:
Wie hier SONSTIGE - Matek CRSF to PWM Decoder angekündigt, gibt es nun eine Platine für den RP2040-Zero von Waveshare mit einem ELRS Empfänger und optionalem Baro und GPS.
Als Baro sind GY-63 oder SPL06 möglich, GPS Beitian 180 oder 220. Beide werden auf der Oberseite montiert.
Der Empfänger kommt nach unten. Möglich sind Empfänger welche CRSF ausgeben, z. B. ELRS/Crossfire 900MHz, Tracer 2,4GHz oder alternativ SBus/SPort z. B. FrSky oder Jeti.
Die Spannungsversorgung der Elektronik übernimmt ein 5V Regler.
Statt der gerade herausstehenden Servo-Pins können auch abgewinkelte verwendet werden - dafür gibt es leider keine 3D Vorschau. Leider gibt es auch kein 3D Modell von Empfänger, Baro und GPS, deswegen ist hier Phantasie gefragt.
Das ganze wird sofort verständlich, wenn der Prototyp aufgebaut und wir Bilder präsentieren können.
Als Baro sind GY-63 oder SPL06 möglich, GPS Beitian 180 oder 220. Beide werden auf der Oberseite montiert.
Der Empfänger kommt nach unten. Möglich sind Empfänger welche CRSF ausgeben, z. B. ELRS/Crossfire 900MHz, Tracer 2,4GHz oder alternativ SBus/SPort z. B. FrSky oder Jeti.
Die Spannungsversorgung der Elektronik übernimmt ein 5V Regler.
Statt der gerade herausstehenden Servo-Pins können auch abgewinkelte verwendet werden - dafür gibt es leider keine 3D Vorschau. Leider gibt es auch kein 3D Modell von Empfänger, Baro und GPS, deswegen ist hier Phantasie gefragt.
Das ganze wird sofort verständlich, wenn der Prototyp aufgebaut und wir Bilder präsentieren können.
Mstrens hat ein Update in Arbeit mit dann 16 PWM Kanälen
=> https://www.rcgroups.com/forums/showpost.php?p=49511641&postcount=22
und => GitHub - mstrens/oXs_on_RP2040 at Test-for-16-PWM
Konkurrenz für ELRS v 3 ???
=> https://www.rcgroups.com/forums/showpost.php?p=49511641&postcount=22
und => GitHub - mstrens/oXs_on_RP2040 at Test-for-16-PWM
Konkurrenz für ELRS v 3 ???
Zuletzt bearbeitet:
Code:
// ------- General ------------------
// This project can be interfaced with an ELRS, a JETI or a FRSKY receiver (protocol has to be selected accordingly)
//
// This project is foreseen to generate telemetry data (e.g. when a flight controller is not used) , PWM and Sbus signals
// For telemetry, it can provide
// - up to 3 analog voltages measurement (with scaling and offset)
// - one RPM measurement; a scaling (SCALE4) can be used to take care e.g. of number of blades (optional)
// - the altitude and the vertical speed when connected to a pressure sensor (optional)
// - GPS data (longitude, latitude, speed, altitude,...) (optional)
