
Quadrocopter Eigenentwicklung
- Themenstarter Vampire
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Messdatenvisualisierung auf Fernsteuerung - Der Anfang
Hi Leute!
@lustigewg: NP!
Ich hab mal angefangen, die Messdaten auf dem Display der Fernstereung zu visualisieren:
[video=youtube;5Bghjn4Ds8c]http://www.youtube.com/watch?v=5Bghjn4Ds8c[/video]
Das sieht auf den ersten Blick nicht nach was Beseonderem aus aber lasst Euch gesagt sein, so etwas zu implementieren ist anspruchsvoll.
Zunächst musste ich mir ein Konzept überlegen, wie einzelne Displayseiten in der Software abgearbeitet werden müssen, dazu kommt die Entgegennahme der Touchevents, wenn man auf die Buttons drückt. Ich habe Steuerelemente für die ein und zweichachisgen "Slider" implementiert, da diese noch öfter gebraucht werden für andere Visualisierungen usw.. Sehr aufwendig die ganze Visualisierung. Aber so ist das in der Softwareentwicklung: Viel Unterbau für eine elegante Verwendung der High-Level Funktionen. Aber ich hatte ja gewarnt, dass es erstmal etwas weniger actionreich vorran geht.
Viele Grüße,
Markus
Hi Leute!
@lustigewg: NP!
Ich hab mal angefangen, die Messdaten auf dem Display der Fernstereung zu visualisieren:
[video=youtube;5Bghjn4Ds8c]http://www.youtube.com/watch?v=5Bghjn4Ds8c[/video]
Das sieht auf den ersten Blick nicht nach was Beseonderem aus aber lasst Euch gesagt sein, so etwas zu implementieren ist anspruchsvoll.
Zunächst musste ich mir ein Konzept überlegen, wie einzelne Displayseiten in der Software abgearbeitet werden müssen, dazu kommt die Entgegennahme der Touchevents, wenn man auf die Buttons drückt. Ich habe Steuerelemente für die ein und zweichachisgen "Slider" implementiert, da diese noch öfter gebraucht werden für andere Visualisierungen usw.. Sehr aufwendig die ganze Visualisierung. Aber so ist das in der Softwareentwicklung: Viel Unterbau für eine elegante Verwendung der High-Level Funktionen. Aber ich hatte ja gewarnt, dass es erstmal etwas weniger actionreich vorran geht.
Viele Grüße,
Markus
Zuletzt bearbeitet:
Sieht sehr gut aus! Ich weiß zwar nicht ob die Informationen während des Fluges benötigt werden, aber da es wahrscheinlich erstmal um die grundlegende UI-Hardware Layer geht sieht es schon sehr gut aus!
Wo wir bei Hardware sind, was genau kommt da zum Einsatz? Welcher Controller, Display drüber und was genau zur Datenübertragung?
Welche Übertragungsraten erreichst du damit?
Wo wir bei Hardware sind, was genau kommt da zum Einsatz? Welcher Controller, Display drüber und was genau zur Datenübertragung?
Welche Übertragungsraten erreichst du damit?
Hi!
Die Informationen werden normalerweise nicht während des Fluges benötigt. Ich brauche sie aber, um festzustellen wie sich mein Copter aktuell mit seinen Messwerten im realen Flug verhällt, um damit die Reglerparameter zu optimieren. Sprich: Ich werde in meinen nächsten Flügen immer mal ein schnelles Auge aufs Display riskieren. Ich erhoffe mir dadurch besser feststellen zu können, ob das aktuell noch auftretende Schwingen dem Filter oder der Regelung geschuldet ist. Das geht leider nicht mehr im Wohnzimmer an der Wäscheleine. Für später wäre eine automatische Messdatenaufzeichnung denkbar, welche man anschließend am PC anschauen kann.
Der aufmerksame Leser hat all diese Infos sicher schon aus dem Threadverlauf herausgelsen aber ich fasse es gerne nochmal für Dich zusammen ;-):
* Das Herzstück ist ein ATXMega128 Mikrocontroller von Atmel, dieser hat eine FloatingPointUnit.
* Das Display ist ein eDIP240 von Electronic Assembly mit analogem Touch-Display.
* Zur Funkübertragung kommen DNT24P Module zum Einsatz (2,4GHz, FHSS, 8km Reichweite). Meine Messungen haben ergeben, dass man damit im "Echtzeitmodus" ca. 2500 Byte/s netto sicher übertragen bekommt (Insgesamt, also Hin- und Rückrichtung zusammen). Meine Implementierung ist so aufgebaut, dass immer nur die Daten per Funk übertragen werden, welche kontextabhängig bzgl. des aktuellen Displayscreens benötigt werden. Eine permanente Übertragung aller Messdaten mit hoher Frequenz ist nicht möglich, das überstreigt schlichtweg die Bandbreite der Funkmodule.
Meine Funkkommunikation arbeitet so, dass die Steuerdaten der Fernsteuerung mit 50Hz an den Copter übertragen werden. Diese Frequenz wird auch von allen handelsüblichen Fernsteuerungen verwendet. So bleibt noch genug Bandbreite übrig, um mit 50Hz jeweils ein Datenpaket mit 4 netto Datenbytes hin und zurück zu übertragen.
Gruß, Markus
Die Informationen werden normalerweise nicht während des Fluges benötigt. Ich brauche sie aber, um festzustellen wie sich mein Copter aktuell mit seinen Messwerten im realen Flug verhällt, um damit die Reglerparameter zu optimieren. Sprich: Ich werde in meinen nächsten Flügen immer mal ein schnelles Auge aufs Display riskieren. Ich erhoffe mir dadurch besser feststellen zu können, ob das aktuell noch auftretende Schwingen dem Filter oder der Regelung geschuldet ist. Das geht leider nicht mehr im Wohnzimmer an der Wäscheleine. Für später wäre eine automatische Messdatenaufzeichnung denkbar, welche man anschließend am PC anschauen kann.
Der aufmerksame Leser hat all diese Infos sicher schon aus dem Threadverlauf herausgelsen aber ich fasse es gerne nochmal für Dich zusammen ;-):
* Das Herzstück ist ein ATXMega128 Mikrocontroller von Atmel, dieser hat eine FloatingPointUnit.
* Das Display ist ein eDIP240 von Electronic Assembly mit analogem Touch-Display.
* Zur Funkübertragung kommen DNT24P Module zum Einsatz (2,4GHz, FHSS, 8km Reichweite). Meine Messungen haben ergeben, dass man damit im "Echtzeitmodus" ca. 2500 Byte/s netto sicher übertragen bekommt (Insgesamt, also Hin- und Rückrichtung zusammen). Meine Implementierung ist so aufgebaut, dass immer nur die Daten per Funk übertragen werden, welche kontextabhängig bzgl. des aktuellen Displayscreens benötigt werden. Eine permanente Übertragung aller Messdaten mit hoher Frequenz ist nicht möglich, das überstreigt schlichtweg die Bandbreite der Funkmodule.
Meine Funkkommunikation arbeitet so, dass die Steuerdaten der Fernsteuerung mit 50Hz an den Copter übertragen werden. Diese Frequenz wird auch von allen handelsüblichen Fernsteuerungen verwendet. So bleibt noch genug Bandbreite übrig, um mit 50Hz jeweils ein Datenpaket mit 4 netto Datenbytes hin und zurück zu übertragen.
Gruß, Markus
Zuletzt bearbeitet:
Landegestell
Hallo Leute!
Ich wollte mal wieder ein Zeichen von mir geben, wenn auch nur ein Kleines. Die Visualisierung usw. wir noch ein wenig Zeit in Anspruch nehmen. Vielleicht hab ich aber am Sonntag mehr zu berichten. Bis dahin hab ich erstmal nur ein 3D Entwurf eines Landegestells für Euch. Die Füße wird mir wieder mein Kumpel in den nächsten Wochen fräsen. Ich hab sie so entworfen, dass man ca. 20cm Luft hat unter dem AKKU. Da kann man dann noch ne Kamera dran hängen und ggf. sogar noch einen 2 Achsen-Gimbal. Gewichtstechnich kann ich noch nichts zu den Füßen sagen, ich lasse mich einrfach mal überraschen.
Gruß, Markus
Hallo Leute!
Ich wollte mal wieder ein Zeichen von mir geben, wenn auch nur ein Kleines. Die Visualisierung usw. wir noch ein wenig Zeit in Anspruch nehmen. Vielleicht hab ich aber am Sonntag mehr zu berichten. Bis dahin hab ich erstmal nur ein 3D Entwurf eines Landegestells für Euch. Die Füße wird mir wieder mein Kumpel in den nächsten Wochen fräsen. Ich hab sie so entworfen, dass man ca. 20cm Luft hat unter dem AKKU. Da kann man dann noch ne Kamera dran hängen und ggf. sogar noch einen 2 Achsen-Gimbal. Gewichtstechnich kann ich noch nichts zu den Füßen sagen, ich lasse mich einrfach mal überraschen.
Gruß, Markus
Anhänge
-
 96 KB Aufrufe: 105
96 KB Aufrufe: 105
Moin, erstmal ganz grossen Respekt. Ich bin naja von der alten Garde und habe das RC Fliegen erst vor einem halben Jahr für mich entdeckt. Ich kenne Elektronik nur aus der Zeit da gab es noch kein SMD ;-). Von daher ganz grossen Respekt zu der neuen Generation an Bastlern. Ich habe mich auch nur hier angemeldet zwecks VampiresThread und Fricklers Teilnahme. Das sind die Perlen des Internets ...
Den Rest kann mann sich ja vielfach zusammenlesen (Danke Internet ;.-) aber solche grundlegenden Infos... Danke Vampir Und auch danke an Frickler dessen FPV hoffentlich auch bald mit mir fliegt.
Bitte mach weiter ich sauge jede Info von dir auf ;-)
Gruss Stefan
PS. Moin Männers
PS2: Darf ich dein Meisterwerk in Fingers Welt (Bastler Forum) posten ?
Den Rest kann mann sich ja vielfach zusammenlesen (Danke Internet ;.-) aber solche grundlegenden Infos... Danke Vampir Und auch danke an Frickler dessen FPV hoffentlich auch bald mit mir fliegt.
Bitte mach weiter ich sauge jede Info von dir auf ;-)
Gruss Stefan
PS. Moin Männers
PS2: Darf ich dein Meisterwerk in Fingers Welt (Bastler Forum) posten ?
Der erste Meilenstein ist erreicht: Flugfähig und steuerbar
Hallo an Alle!
Zunächst erstmal herzlichen Dank für Euer Feedback. Ich werd noch ganz rot ... .
.
@ Optimus: Ich fühle mich geehrt, dass Du meinen Projektbericht in anderen Foren posten möchtest und gebe Dir selbstverständlich mein Einverständnis! Vielen Dank, dass Du mich erst gefragt hast") .
.
Dann zu den neuesten Infos: Es ist ja lange nichts passiert hier. Das hat aber den Grund, dass ich viel rumprobiert habe und auch noch einen RIESENBUG in meiner Filterklasse im Programmcode zerquetschen musste. Das möchte ich Euch auch alles schreiben aber heute Abend habe ich dazu einfach keine Muße mehr (Bin grad vom Jahresabschluss meiner Abteilung gekommen und ich glaube einen so langen Text bekomme ich jetzt nicht mehr zustande ...). WAS ich aber unbedingt heute noch loswerden will ist ein Video vom ersten VERNÜNFTIGEN Flug. Jaaaaaa, die Maschine läuft jetzt, liegt gut (vielleicht noch nicht sehr gut aber auf jeden Fall im oberen Bereich von gut) in der Luft und lässt sich sauber steuern. Da mein Ziel irgendwann ja ist, Videos in sehr guter Quallität damit zu machen habe ich mich dabei mal an den Videoschnitt und musikalische Untermalung getraut und das ist dabei rausgekommen:
(Achtung: Es könnte musikalisch ein µ zu episch untermalt sein aber mir gefällts)
[video=youtube;IFsA8ijxqYc]http://www.youtube.com/watch?v=IFsA8ijxqYc&feature=youtu.be[/video]
Viele herzliche Grüße,
Markus
PS: Die langtextform kommt am WE, versprochen!
Kleiner Nachtrag:
Da ein wichtiger Meilenstein erreicht ist, denke ich es ist der richtige Moment ein paar Leuten Danke zu sagen!
Matthias: Danke für Deine alte Funke und die Steuersticks sowie für Deine allgemeinen Tipps zum Modellflug!
Alex: Danke für Deine theoretischen Tipps und Tricks zur Regelungstechnik! Du bist der Regelungskönig!
Hadwin: Dir danke ich, dass Du so nett bist und mir ab und zu Teile fräst!
Und natürlich danke ich auch allen, die hier ab und zu reinschauen und Ihre Meinung und Ihr Feedback einbringen. Das ist ein unheimlicher Motivationskatalisator!
Hallo an Alle!
Zunächst erstmal herzlichen Dank für Euer Feedback. Ich werd noch ganz rot ...
.@ Optimus: Ich fühle mich geehrt, dass Du meinen Projektbericht in anderen Foren posten möchtest und gebe Dir selbstverständlich mein Einverständnis! Vielen Dank, dass Du mich erst gefragt hast
.Dann zu den neuesten Infos: Es ist ja lange nichts passiert hier. Das hat aber den Grund, dass ich viel rumprobiert habe und auch noch einen RIESENBUG in meiner Filterklasse im Programmcode zerquetschen musste. Das möchte ich Euch auch alles schreiben aber heute Abend habe ich dazu einfach keine Muße mehr (Bin grad vom Jahresabschluss meiner Abteilung gekommen und ich glaube einen so langen Text bekomme ich jetzt nicht mehr zustande ...). WAS ich aber unbedingt heute noch loswerden will ist ein Video vom ersten VERNÜNFTIGEN Flug. Jaaaaaa, die Maschine läuft jetzt, liegt gut (vielleicht noch nicht sehr gut aber auf jeden Fall im oberen Bereich von gut) in der Luft und lässt sich sauber steuern. Da mein Ziel irgendwann ja ist, Videos in sehr guter Quallität damit zu machen habe ich mich dabei mal an den Videoschnitt und musikalische Untermalung getraut und das ist dabei rausgekommen:
(Achtung: Es könnte musikalisch ein µ zu episch untermalt sein aber mir gefällts
)[video=youtube;IFsA8ijxqYc]http://www.youtube.com/watch?v=IFsA8ijxqYc&feature=youtu.be[/video]
Viele herzliche Grüße,
Markus
PS: Die langtextform kommt am WE, versprochen!
Kleiner Nachtrag:
Da ein wichtiger Meilenstein erreicht ist, denke ich es ist der richtige Moment ein paar Leuten Danke zu sagen!
Matthias: Danke für Deine alte Funke und die Steuersticks sowie für Deine allgemeinen Tipps zum Modellflug!
Alex: Danke für Deine theoretischen Tipps und Tricks zur Regelungstechnik! Du bist der Regelungskönig!
Hadwin: Dir danke ich, dass Du so nett bist und mir ab und zu Teile fräst!
Und natürlich danke ich auch allen, die hier ab und zu reinschauen und Ihre Meinung und Ihr Feedback einbringen. Das ist ein unheimlicher Motivationskatalisator!
Zuletzt bearbeitet:
Gratuliere!
Sieht doch sehr gut aus
Etwas komplizierter, als auf kommerzieller Teile zurückzugreifen, aber das Ergebnis stimmt.
Was mich persönlich interessieren würde, wären folgende Flugmanöver:
1. Schweben auf der Stelle und dann voll Gier rechts und dann links rein. Was macht der? Nur Gieren, oder dabei steigen/fallen?
2. Hoch hinauf und dann senkrecht absteigen lassen. Was macht der? Kommt er sauber gesteuert runter, oder gibt das ein Eiertanz?
Alle kommerzielle Copter, die ich kenne machen beim Gieren auf der Stelle einen Sprung nach oben oder unten. Beim schnellen Abstieg machen die Copter einen Eier-/Wackeltanz.
Sieht doch sehr gut aus
Etwas komplizierter, als auf kommerzieller Teile zurückzugreifen, aber das Ergebnis stimmt.
Was mich persönlich interessieren würde, wären folgende Flugmanöver:
1. Schweben auf der Stelle und dann voll Gier rechts und dann links rein. Was macht der? Nur Gieren, oder dabei steigen/fallen?
2. Hoch hinauf und dann senkrecht absteigen lassen. Was macht der? Kommt er sauber gesteuert runter, oder gibt das ein Eiertanz?
Alle kommerzielle Copter, die ich kenne machen beim Gieren auf der Stelle einen Sprung nach oben oder unten. Beim schnellen Abstieg machen die Copter einen Eier-/Wackeltanz.
Was ist die letzten Wochen eigentlich passiert?
Hi!
Wie versprochen kommt jetzt der ausführliche Text zu meinem Aktivitäten der letzten Wochen.
@Heliflieger: Deine beiden Fragen, werde ich im Anschluss beantworten, weil ich da etwas mehr ausholen möchte.
Also ich hatte ja das Problem, das der Copter beim ersten Flug kleine schnelle Schwinungen und große, langsame Schwingungen verursacht hatte. Zunächst zu den großen langsamen Schwingungen: Ich habe sie beim besten Willen nicht durch verstellen der PID Reglerparameter wegbekommen. Als ich dann irgendwann aus Verzweifelung angefangen habe an dem Filterverhältnis Accelerometeranteil:Gyroanteil herumzuspielen habe ich über die Messdatenvidsualisierung einen MEGABUG gefunden. Hätte ich die durch den Filter errechneten Roll und Pitch Winkel nicht auf dem Fernsteuerungsdisplay visualisiert, wär ich da wohl nie drauf gekommen. Und zwar habe ich festgestellt, dass der Gyroanteil jeder Achse einfach das falsche Vorzeichen hatte. Das heisst, wenn der Copter z.B. auf der Roll Achse von 0° auf +45° gedreht ist, hat der Gyroanteil auf -45° gerechnet. Das ist mir zuerst nicht aufgefallen, weil der Accelerometerwert in die richtige Richtung eingestellt war und trotz seinem kleinen Anteil von nur 2% die Achse "augenscheinlich" schnell genug korrigiert hat. Echt ein blöder Fehler..... Aber da sieht man mal was die Visualisierung der Messdaten (wenn auch nicht im normalen Flug benötigt) so aufdecken kann ;-). Hab das jedenfalls gefixt und die großen Schwinger waren danach komplett weg!
Dann war da noch das Problem die kleinen Schwinger durch die richtigen PID Parameter auszubügeln. Dafür habe ich die Fernsteuerung weiterentwickelt, sodass man nun für Pitch, Roll und Yaw die P, I und D Parameter einzelnen verstellen kann während man vor Ort ist. Zudem habe ich in dem Zuge auch eingerichtet, dass man bis zu vier PID Parametersätze im EEPROM des Copters abspeichern und bei Bedarf für verschiedene Copterkonfigurationen (Mit Kamera, ohne Kamera, ...) laden kann. Das folgende Video zeigt die neuen Visuaklisierungen auf dem Display und die PID Parametereinstellung:
[video=youtube;__3qv06EqlM]http://www.youtube.com/watch?v=__3qv06EqlM&feature=youtu.be[/video]
Nachdem nun endlich alles eingestellt war schwebte er endlich wunderschön und ließ sich super in Pitch und Roll Achse steuern. Auch das Aufsteigen war super. Ich hatte beim ersten Versuch die 12" Props drauf. Beim Absteigen kam dann aber doch ernüchterung auf, denn selbst bei geringer Sinkrate hat er sich extrem aufgeschwungen. Das ergebnis sieht man in Bild 1. Zum Glück ist nicht mehr kaputt gegangen. Ich habe dann abgebrochen und erstmal etwas im Internet rumgeforscht. Das Ergebnis beschreibe ich im nächsten Post, damit der hier nicht so groß wird. Ich habe jedenfalls danach 10" Props aufgeschnallt und siehe da, auch das Absinken funktioniert mit akzeptabler Geschwindigkeit ohne großartigens Aufschwingen. Leicht Schwingen tut er aber trotzdem noch, was Deine Frage, Heliflieger, in Kurzform beantwortet. Die langform im nächsten Post ;-).
Gruß, Markus
Hi!
Wie versprochen kommt jetzt der ausführliche Text zu meinem Aktivitäten der letzten Wochen.
@Heliflieger: Deine beiden Fragen, werde ich im Anschluss beantworten, weil ich da etwas mehr ausholen möchte.
Also ich hatte ja das Problem, das der Copter beim ersten Flug kleine schnelle Schwinungen und große, langsame Schwingungen verursacht hatte. Zunächst zu den großen langsamen Schwingungen: Ich habe sie beim besten Willen nicht durch verstellen der PID Reglerparameter wegbekommen. Als ich dann irgendwann aus Verzweifelung angefangen habe an dem Filterverhältnis Accelerometeranteil:Gyroanteil herumzuspielen habe ich über die Messdatenvidsualisierung einen MEGABUG gefunden. Hätte ich die durch den Filter errechneten Roll und Pitch Winkel nicht auf dem Fernsteuerungsdisplay visualisiert, wär ich da wohl nie drauf gekommen. Und zwar habe ich festgestellt, dass der Gyroanteil jeder Achse einfach das falsche Vorzeichen hatte. Das heisst, wenn der Copter z.B. auf der Roll Achse von 0° auf +45° gedreht ist, hat der Gyroanteil auf -45° gerechnet. Das ist mir zuerst nicht aufgefallen, weil der Accelerometerwert in die richtige Richtung eingestellt war und trotz seinem kleinen Anteil von nur 2% die Achse "augenscheinlich" schnell genug korrigiert hat. Echt ein blöder Fehler..... Aber da sieht man mal was die Visualisierung der Messdaten (wenn auch nicht im normalen Flug benötigt) so aufdecken kann ;-). Hab das jedenfalls gefixt und die großen Schwinger waren danach komplett weg!
Dann war da noch das Problem die kleinen Schwinger durch die richtigen PID Parameter auszubügeln. Dafür habe ich die Fernsteuerung weiterentwickelt, sodass man nun für Pitch, Roll und Yaw die P, I und D Parameter einzelnen verstellen kann während man vor Ort ist. Zudem habe ich in dem Zuge auch eingerichtet, dass man bis zu vier PID Parametersätze im EEPROM des Copters abspeichern und bei Bedarf für verschiedene Copterkonfigurationen (Mit Kamera, ohne Kamera, ...) laden kann. Das folgende Video zeigt die neuen Visuaklisierungen auf dem Display und die PID Parametereinstellung:
[video=youtube;__3qv06EqlM]http://www.youtube.com/watch?v=__3qv06EqlM&feature=youtu.be[/video]
Nachdem nun endlich alles eingestellt war schwebte er endlich wunderschön und ließ sich super in Pitch und Roll Achse steuern. Auch das Aufsteigen war super. Ich hatte beim ersten Versuch die 12" Props drauf. Beim Absteigen kam dann aber doch ernüchterung auf, denn selbst bei geringer Sinkrate hat er sich extrem aufgeschwungen. Das ergebnis sieht man in Bild 1. Zum Glück ist nicht mehr kaputt gegangen. Ich habe dann abgebrochen und erstmal etwas im Internet rumgeforscht. Das Ergebnis beschreibe ich im nächsten Post, damit der hier nicht so groß wird. Ich habe jedenfalls danach 10" Props aufgeschnallt und siehe da, auch das Absinken funktioniert mit akzeptabler Geschwindigkeit ohne großartigens Aufschwingen. Leicht Schwingen tut er aber trotzdem noch, was Deine Frage, Heliflieger, in Kurzform beantwortet. Die langform im nächsten Post ;-).
Gruß, Markus
Anhänge
-
 408,9 KB Aufrufe: 75
408,9 KB Aufrufe: 75
Wirbelring-Stadium
Ich bin sicher viele kennen den Begriff Wirbelring-Stadium aber für alle anderen möchte ich das Phänomen mal beschreiben. Das Wirbelring-Stadium ist der Grund dafür, dass Copter beim Absinken häufig einen (wie so schön von Heliflieger bezeichnet) Eiertanz aufführen.
URSACHE:
Eiertanz tritt auf, wenn die Absinkgeschwindigkeit eines Drehflüglers (Multicopter oder Hubschrauber) innerhalb eines bestimmten Verhältnisses zu der Luftgeschwindigkeit, die durch den Propeller selbst nach unten erzeugt wird, ist. In meinem Fall kann man sagen: ein Quadrocopter mit ca. 1,4kg und 12" Props hat starke Probleme beim Absinken und das dürfte auch bei jedem anderen Copter mit diesen Eckdaten auftreten. Ursache ist die beim Absinken des Copters neben den Propellern aufsteigende Umgebungsluft. Quantitativ muss man sich das so vorstellen, dass die Luft an den Propellerausenkannten, die der Propeller eben gerade erst nach unten ausgestoßen hat seitlich in einer Ringform um den Propeller herumwandert und wieder von oben vom Prop angeseugt wird. Es eststeht ein Wirbelring an den Propellerausenkanten, welcher dafür sorgt, das dort dann kein Auftrieb mehr erzeugt wird. Hat sich erstmal ein Wirbelring gebildet ist er durch mehr Gas-geben nicht mehr aufzulösen, da der Luftstrom des Wirbelrings nur beschleunigt wird. Kommt ein Gefährt in das Wirbelring-Stadium kann der Pilot eigentlich nur eins machen: Seitlich Geschwindigkeit aufnehmen. Mit anderen Worten Roll oder Pitch reinhauen und aus dem Wirbelring herausfliegen, dann stabilisiert sich der Copter und die Props bleiben heil. Das wusste ich nicht und daher bin ich abgeschmiert....
So, dass war nun die Ursache. Ich hoffe Heliflieger ist zufrieden mitd er Erklärung. Wer es noch genauer wissen will und hübsche anschauliche Bilder dazu sehen will, der kann sich das bei Wikipedia inkl. komplizierter Formeln und allem drum und dran anschauen:
http://de.wikipedia.org/wiki/Wirbelringstadium
VERMEIDUNG:
Es ist natürlich vollkommen besch*** für einen Piloten immer seitlich abzusinken daher kann er dem Eiertanz auch vorbeugen. Dazu gibt es verschiedene Möglichkeiten:
1. Kleinere Propeller und 2. höhere Drehzahl
Diese Lösung habe ich umgesetzt. Bei kleinen Propellern tritt Eiertanz später auf, sprich bei höheren Sinkgeschwindigkeiten, da das gleiche Coptergewicht von kleineren Propellern gehalten werden muss, die dann natürklich schneller dehen müssen und somit eine höhere Luftstromgeschwindigkeit durch den Propeller verursachen. Man entfernt sich vom "gefährliche Eiertanzverhältnis" der Luftgeschwindigkeiten. Das Problem ist hier, dass man natürlich mit kleineren Probs mehr Regleröffnung braucht zum Schweben und so nicht mehr so hohe Aufstiegsgeschwindigkeiten erreicht. Das müsste man dann damit kompensieren, dass man Motoren mit höheren KV Zahlen verwendet.
Ich werde jedenfalls bei meinem nächsten Copter auf kleinere Props und höhere Drehzahlen gehen um dieses doch sehr lästige Phänomen zu umschiffen.
An dieser Stelle würden mich Erfahrungswerte von Langzeitcopterpiloten interessieren, welche Copter in verschiedenen Konfigurationen geflogen sind. Gibts da ne Faustregel bei der Auslegung, um Eiertanz zu vermeiden? Zum Beispiel Verhält nis Gewicht zu Propellergröße zu Propelleranzahl?
3. Impeller
Beim Impeller kann Eiertanz nicht auftreten, da eng um den Propeller ein runder Rahmen gefasst ist (wie im Film Avatar diese Kampfhubschrauberdinger). Die Luft kann keinen Wibelring bilden, da sie durch dem Rahmen geblockt wird. Ein weiterer Vorteil von Impellern ist, dass der Wirkungsgrad nicht unerheblich steigt, da die Luft direkt nach unten gedrückt wird und nicht wie bei einem Propeller tweilweise zu sen Seiten. Problem hier ist natürlich das Mehrgewicht durch die Rahmen.
4. Wirbelring-Stadium durch Regelungstechnik ausgleichen
Das habe ich in einigen Foren gelesen aber meiner Meinung ist das Schwachsinn und kann nicht funktionieren. Das wäre für den Regler so, als wenn er einen sich schnell in der Zollzahl ändernden Propeller steuern müsste, der sich dazu noch vollkommen unregelmäßig verhält.
@Heliflieger: Ich hoffe ich konnte Deine Frage beantworten. Mein Copter weist dieses Phänomen auf, aber nur weil ich es nicht auf dem Schirm hatte bei der Copterauslegung. Mein nächster wird beim Absinken garantiert nicht mer eiertanzen :-D.
Gruß, Markus
Ich bin sicher viele kennen den Begriff Wirbelring-Stadium aber für alle anderen möchte ich das Phänomen mal beschreiben. Das Wirbelring-Stadium ist der Grund dafür, dass Copter beim Absinken häufig einen (wie so schön von Heliflieger bezeichnet) Eiertanz aufführen.
URSACHE:
Eiertanz tritt auf, wenn die Absinkgeschwindigkeit eines Drehflüglers (Multicopter oder Hubschrauber) innerhalb eines bestimmten Verhältnisses zu der Luftgeschwindigkeit, die durch den Propeller selbst nach unten erzeugt wird, ist. In meinem Fall kann man sagen: ein Quadrocopter mit ca. 1,4kg und 12" Props hat starke Probleme beim Absinken und das dürfte auch bei jedem anderen Copter mit diesen Eckdaten auftreten. Ursache ist die beim Absinken des Copters neben den Propellern aufsteigende Umgebungsluft. Quantitativ muss man sich das so vorstellen, dass die Luft an den Propellerausenkannten, die der Propeller eben gerade erst nach unten ausgestoßen hat seitlich in einer Ringform um den Propeller herumwandert und wieder von oben vom Prop angeseugt wird. Es eststeht ein Wirbelring an den Propellerausenkanten, welcher dafür sorgt, das dort dann kein Auftrieb mehr erzeugt wird. Hat sich erstmal ein Wirbelring gebildet ist er durch mehr Gas-geben nicht mehr aufzulösen, da der Luftstrom des Wirbelrings nur beschleunigt wird. Kommt ein Gefährt in das Wirbelring-Stadium kann der Pilot eigentlich nur eins machen: Seitlich Geschwindigkeit aufnehmen. Mit anderen Worten Roll oder Pitch reinhauen und aus dem Wirbelring herausfliegen, dann stabilisiert sich der Copter und die Props bleiben heil
. Das wusste ich nicht und daher bin ich abgeschmiert.... So, dass war nun die Ursache. Ich hoffe Heliflieger ist zufrieden mitd er Erklärung. Wer es noch genauer wissen will und hübsche anschauliche Bilder dazu sehen will, der kann sich das bei Wikipedia inkl. komplizierter Formeln und allem drum und dran anschauen:
http://de.wikipedia.org/wiki/Wirbelringstadium
VERMEIDUNG:
Es ist natürlich vollkommen besch*** für einen Piloten immer seitlich abzusinken daher kann er dem Eiertanz auch vorbeugen. Dazu gibt es verschiedene Möglichkeiten:
1. Kleinere Propeller und 2. höhere Drehzahl
Diese Lösung habe ich umgesetzt. Bei kleinen Propellern tritt Eiertanz später auf, sprich bei höheren Sinkgeschwindigkeiten, da das gleiche Coptergewicht von kleineren Propellern gehalten werden muss, die dann natürklich schneller dehen müssen und somit eine höhere Luftstromgeschwindigkeit durch den Propeller verursachen. Man entfernt sich vom "gefährliche Eiertanzverhältnis" der Luftgeschwindigkeiten. Das Problem ist hier, dass man natürlich mit kleineren Probs mehr Regleröffnung braucht zum Schweben und so nicht mehr so hohe Aufstiegsgeschwindigkeiten erreicht. Das müsste man dann damit kompensieren, dass man Motoren mit höheren KV Zahlen verwendet.
Ich werde jedenfalls bei meinem nächsten Copter auf kleinere Props und höhere Drehzahlen gehen um dieses doch sehr lästige Phänomen zu umschiffen.
An dieser Stelle würden mich Erfahrungswerte von Langzeitcopterpiloten interessieren, welche Copter in verschiedenen Konfigurationen geflogen sind. Gibts da ne Faustregel bei der Auslegung, um Eiertanz zu vermeiden? Zum Beispiel Verhält nis Gewicht zu Propellergröße zu Propelleranzahl?
3. Impeller
Beim Impeller kann Eiertanz nicht auftreten, da eng um den Propeller ein runder Rahmen gefasst ist (wie im Film Avatar diese Kampfhubschrauberdinger). Die Luft kann keinen Wibelring bilden, da sie durch dem Rahmen geblockt wird. Ein weiterer Vorteil von Impellern ist, dass der Wirkungsgrad nicht unerheblich steigt, da die Luft direkt nach unten gedrückt wird und nicht wie bei einem Propeller tweilweise zu sen Seiten. Problem hier ist natürlich das Mehrgewicht durch die Rahmen.
4. Wirbelring-Stadium durch Regelungstechnik ausgleichen
Das habe ich in einigen Foren gelesen aber meiner Meinung ist das Schwachsinn und kann nicht funktionieren. Das wäre für den Regler so, als wenn er einen sich schnell in der Zollzahl ändernden Propeller steuern müsste, der sich dazu noch vollkommen unregelmäßig verhält.
@Heliflieger: Ich hoffe ich konnte Deine Frage beantworten. Mein Copter weist dieses Phänomen auf, aber nur weil ich es nicht auf dem Schirm hatte bei der Copterauslegung. Mein nächster wird beim Absinken garantiert nicht mer eiertanzen :-D.
Gruß, Markus
Zuletzt bearbeitet:
Da war ja noch ne Frage von Heliflieger - Copter sinkt ab beim Pitchen / Rollen
Nochmal ich!
@Heliflieger: Deine zweite (eigentlich ja erste Frage) hab ich eben ganz vergessen. Und zwar hast Du geschrieben, dass Du es bisher immer gesehen hast, das Copter beim Rollen / Pitchen entweder gleichzeitig absinken oder aufsteigen.
Also, wenn ein Copter schwebt und in Pitch oder Roll Richtung ausgelegt wird und dabei der Gashabel nicht bewegt wird, sinkt ein Copter ab. Das ist immer so! Die einzige plausible Erklärung, dass er auf gleicher Höhe bleibt oder gar aufsteigt liegt darin, dass die FlightControl beim Rollen / Pitchen selbstständig etwas mehr Gesamtschub gibt, um das Absinken zu kompensieren. Wenn das nicht 100% klappt könnte ich mir vorstellen, das er auch aufsteigt. Allerdings ist es meiner Meinung auch gar nicht schlimm, das er dann absinkt, das erwartet man doch sogar! Der Pilot ist verantwortlich etwas mehr Gas zu geben beim Auslenken um auf gleicher Höhe zu bleiben.
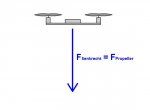
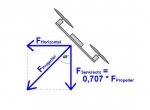
Mal zur Erklärung warum ein Copter überhaupt absinkt dabei. Am besten mann stellt sich den Schub der Propeller als Kraftvektor (F_Propeller) vor. Als Kraft verwendet man den Buchstaben F. Im Schwebeflug geht dieser Kraftvektor senkrecht nach unten, also in die Richtung in die die Propeller die Luft pressen. Also F_Propeller = F_Senkrecht wie in Bild 1 zu sehen. Bild 2 zeigt das Ganze mal wenn der Copter im 45 Grad Winkel steht. F_Proppeller geht nun nicht mehr senkrecht nach unten. Der Kraftvektor, welcher nun senkrecht nach unten geht (F_Senkrecht) und welcher ja gleich F_Propeller sein müsste, um den Copter in ein und der selben Höhe zu halten ist nun aber nur noch 0,707 * F_Propeller. Und genau das ist der Grund dafür, dass der Copter absinkt. Warum 0,707 brauche ich denke ich nicht zu erklären. Das hat ja jeder in der Schule gemacht (cosinus und sinus). Man muss also mehr Gas geben, damit F_Propeller erhöhen, sodass F_Senkrecht gleich dem ursprünglichen F_Propeller im Schwebeflug entspricht.
Das ist also ganz normal.
So, dass wars für heute von mir, ich glaub hier ist jetzt wieder alles Up2Date.
Viele Grüße,
Markus
- Copter sinkt ab beim Pitchen / RollenNochmal ich!
@Heliflieger: Deine zweite (eigentlich ja erste Frage) hab ich eben ganz vergessen. Und zwar hast Du geschrieben, dass Du es bisher immer gesehen hast, das Copter beim Rollen / Pitchen entweder gleichzeitig absinken oder aufsteigen.
Also, wenn ein Copter schwebt und in Pitch oder Roll Richtung ausgelegt wird und dabei der Gashabel nicht bewegt wird, sinkt ein Copter ab. Das ist immer so! Die einzige plausible Erklärung, dass er auf gleicher Höhe bleibt oder gar aufsteigt liegt darin, dass die FlightControl beim Rollen / Pitchen selbstständig etwas mehr Gesamtschub gibt, um das Absinken zu kompensieren. Wenn das nicht 100% klappt könnte ich mir vorstellen, das er auch aufsteigt. Allerdings ist es meiner Meinung auch gar nicht schlimm, das er dann absinkt, das erwartet man doch sogar! Der Pilot ist verantwortlich etwas mehr Gas zu geben beim Auslenken um auf gleicher Höhe zu bleiben.
Mal zur Erklärung warum ein Copter überhaupt absinkt dabei. Am besten mann stellt sich den Schub der Propeller als Kraftvektor (F_Propeller) vor. Als Kraft verwendet man den Buchstaben F. Im Schwebeflug geht dieser Kraftvektor senkrecht nach unten, also in die Richtung in die die Propeller die Luft pressen. Also F_Propeller = F_Senkrecht wie in Bild 1 zu sehen. Bild 2 zeigt das Ganze mal wenn der Copter im 45 Grad Winkel steht. F_Proppeller geht nun nicht mehr senkrecht nach unten. Der Kraftvektor, welcher nun senkrecht nach unten geht (F_Senkrecht) und welcher ja gleich F_Propeller sein müsste, um den Copter in ein und der selben Höhe zu halten ist nun aber nur noch 0,707 * F_Propeller. Und genau das ist der Grund dafür, dass der Copter absinkt. Warum 0,707 brauche ich denke ich nicht zu erklären. Das hat ja jeder in der Schule gemacht (cosinus und sinus
). Man muss also mehr Gas geben, damit F_Propeller erhöhen, sodass F_Senkrecht gleich dem ursprünglichen F_Propeller im Schwebeflug entspricht.Das ist also ganz normal.
So, dass wars für heute von mir, ich glaub hier ist jetzt wieder alles Up2Date.
Viele Grüße,
Markus
Anhänge
-
 10,6 KB Aufrufe: 52
10,6 KB Aufrufe: 52 -
 19,6 KB Aufrufe: 53
19,6 KB Aufrufe: 53
Hallo, Markus!
Vielen Dank, für deine Erklärungen, die sehr tiefes Wissen der Materie vermuten lassen.
So tief habe ich mich damit noch nicht beschäftigt. Daher habe ich auch nur so 60-70% verstanden.
Ich werde mir aber deine Erklärungen noch mehrfach durchlesen und hoffe, dass ich die restlichen Prozente dann auch noch verstehe.
Die ganze Zeit ging ich davon aus, dass der Eiertanz etc. auf eine unsaubere Programmierung der Firmware zurückzuführen ist, aber nicht auf Strömungstechnik.
Ich fliege diverse Copter mit diversen Steuerungssytemen (MK, KK2.0 LED) und bei allen traten die von mir gefragten Phenomene auf. Ich flog Tri, Quadro und Hexacopter. Bei allen trat der Eiertanz beim Absteigen in unterschiedlichen Geschwindigkeiten auf.
Was ich aber auch feststellte und vom Gefühl heraus gemacht hatte, war der seitliche Sinkflug, bei dem dann kein Eiertanz mehr auftrat.
Das ist vor allem bei FPV-Flug grausam, wenn der Copter so anfängt rumzuschwabbeln.
Ich baue gerade einen GigaCopter mit einer Naza V2 und bin mal gespannt, wie sich diese Steuerung und Motor/Regler/Propeller-Konfiguration verhält.
Jedenfalls Hochachtung vor deiner Arbeit und deinem Wissen!
Es ist eine Sache, einen Copterbausatz und eine Steuerung zusammen zu bauen und einzustellen, oder alles kpl. selbst zu bauen und vor allem zu hinterfragen, warum etwas ausgerechnet so ist, wie es ist.
Das ist in meinen Augen Modellbau in Perfektion und der besonderen Art!
Vielen Dank, für deine Erklärungen, die sehr tiefes Wissen der Materie vermuten lassen.
So tief habe ich mich damit noch nicht beschäftigt. Daher habe ich auch nur so 60-70% verstanden.
Ich werde mir aber deine Erklärungen noch mehrfach durchlesen und hoffe, dass ich die restlichen Prozente dann auch noch verstehe.
Die ganze Zeit ging ich davon aus, dass der Eiertanz etc. auf eine unsaubere Programmierung der Firmware zurückzuführen ist, aber nicht auf Strömungstechnik.
Ich fliege diverse Copter mit diversen Steuerungssytemen (MK, KK2.0 LED) und bei allen traten die von mir gefragten Phenomene auf. Ich flog Tri, Quadro und Hexacopter. Bei allen trat der Eiertanz beim Absteigen in unterschiedlichen Geschwindigkeiten auf.
Was ich aber auch feststellte und vom Gefühl heraus gemacht hatte, war der seitliche Sinkflug, bei dem dann kein Eiertanz mehr auftrat.
Das ist vor allem bei FPV-Flug grausam, wenn der Copter so anfängt rumzuschwabbeln.
Ich baue gerade einen GigaCopter mit einer Naza V2 und bin mal gespannt, wie sich diese Steuerung und Motor/Regler/Propeller-Konfiguration verhält.
Jedenfalls Hochachtung vor deiner Arbeit und deinem Wissen!
Es ist eine Sache, einen Copterbausatz und eine Steuerung zusammen zu bauen und einzustellen, oder alles kpl. selbst zu bauen und vor allem zu hinterfragen, warum etwas ausgerechnet so ist, wie es ist.
Das ist in meinen Augen Modellbau in Perfektion und der besonderen Art!
Zuletzt bearbeitet:
Moin, schön erklärt. Zu meinen bescheidenen Erfahrungen zum Thema Flugverhalten muss ich kurz ausholen. Ich habe das Fliegen mit einem WLtoys 929 Quadrocopter "gelernt". Kann ich übrigens wirklich empfehlen, hat damals RTF (Ready to fly) 40 Euronen bei Pollin gekostet. Fast unkaputtbar bzw. leicht zu reparieren. Dann noch 3-4 Ersatzakkus dazu und mann kann unbeschwert üben. Hier mal ein Video zu dem Teil
http://www.youtube.com/watch?v=QcC_HwfUPsU
Der hatte das mit dem Taumeln auch. Aber da ich dann für Frau und Kumpels usw. welche besorgt hatte konnte ich ca. bei 6 Stück verschieden starke Ausprägungen dieses Verhaltens feststellen. Die ersten 2 bestellten hatten das Taumeln im Gegensatz zu den danach bestellten am wenigsten. Schwagers 2 St., in denen schon andere Platinenversionen verbaut wurden waren insgesamt unruhiger und eierten am meisten beim runterkommen. Ähnlich bei den anderen.
Bei meinen dann selber gebauten angelehnt an Ozonisator toller Anleitung/Empfehlung im Fingers Welt Forum
http://www.fingers-welt.de/phpBB/viewtopic.php?f=3&t=20
sind 1450 KV Motoren, 8045 Props an 2S Akkus mit der Multiwii Pro verbaut. Bilder und Screens von den Einstellungen hier :
http://www.fingers-welt.de/phpBB/viewtopic.php?f=14&t=77&start=325
Der Kopter mit den Kaffeelöffeln ;-) bin ich. Übrigens wärst du in dem Forum auch toll aufgehoben (also mit Elektronikbasteleien meine ich). Dort werden Räder reihenweise aufgeschraubt und neu erfunden))
Ach ja ich bin selber überrascht wie stabil meiner fliegt. Ich konnte das Taumeln bis jetzt nur 1-2 mal andeutungsweise bemerken. Worans liegt ? Das Gewicht der Löffel aussen spielt evtl. rein, obwohl die mittlerweile auch schon gekürzt sind.
Am Anfang als wir nur die kleinen Starrunner hatten haben wir so ausn Bauch raus immer gesagt das die Sensoren aus dem Tritt kommen wegen der Abwärtsbewegung. Das mit der Wirbelringgeschichte hatten wir dann später auch gelesen. Aber so ganz konnte ich den Gedanken an die Sensoren auch nicht verbannen, habe es aber dann auch nicht weiter verfolgt.
Nuja ich werde mir demnächst wohl einen 2. gewichtsoptimierteren Copter bauen und und auch mal eine andere Steuerung testen unter anderm mit 6050 Sensor, meine Muwii Pro hat den ITG3205 Triple Axis Gyro. Mal sehen was sich dann so ändert.
Gruss Stefan
http://www.youtube.com/watch?v=QcC_HwfUPsU
Der hatte das mit dem Taumeln auch. Aber da ich dann für Frau und Kumpels usw. welche besorgt hatte konnte ich ca. bei 6 Stück verschieden starke Ausprägungen dieses Verhaltens feststellen. Die ersten 2 bestellten hatten das Taumeln im Gegensatz zu den danach bestellten am wenigsten. Schwagers 2 St., in denen schon andere Platinenversionen verbaut wurden waren insgesamt unruhiger und eierten am meisten beim runterkommen. Ähnlich bei den anderen.
Bei meinen dann selber gebauten angelehnt an Ozonisator toller Anleitung/Empfehlung im Fingers Welt Forum
http://www.fingers-welt.de/phpBB/viewtopic.php?f=3&t=20
sind 1450 KV Motoren, 8045 Props an 2S Akkus mit der Multiwii Pro verbaut. Bilder und Screens von den Einstellungen hier :
http://www.fingers-welt.de/phpBB/viewtopic.php?f=14&t=77&start=325
Der Kopter mit den Kaffeelöffeln ;-) bin ich. Übrigens wärst du in dem Forum auch toll aufgehoben (also mit Elektronikbasteleien meine ich). Dort werden Räder reihenweise aufgeschraubt und neu erfunden
))Ach ja ich bin selber überrascht wie stabil meiner fliegt. Ich konnte das Taumeln bis jetzt nur 1-2 mal andeutungsweise bemerken. Worans liegt ? Das Gewicht der Löffel aussen spielt evtl. rein, obwohl die mittlerweile auch schon gekürzt sind.
Am Anfang als wir nur die kleinen Starrunner hatten haben wir so ausn Bauch raus immer gesagt das die Sensoren aus dem Tritt kommen wegen der Abwärtsbewegung. Das mit der Wirbelringgeschichte hatten wir dann später auch gelesen. Aber so ganz konnte ich den Gedanken an die Sensoren auch nicht verbannen, habe es aber dann auch nicht weiter verfolgt.
Nuja ich werde mir demnächst wohl einen 2. gewichtsoptimierteren Copter bauen und und auch mal eine andere Steuerung testen unter anderm mit 6050 Sensor, meine Muwii Pro hat den ITG3205 Triple Axis Gyro. Mal sehen was sich dann so ändert.
Gruss Stefan
Zuletzt bearbeitet:
...
...
An dieser Stelle würden mich Erfahrungswerte von Langzeitcopterpiloten interessieren, welche Copter in verschiedenen Konfigurationen geflogen sind. Gibts da ne Faustregel bei der Auslegung, um Eiertanz zu vermeiden? Zum Beispiel Verhält nis Gewicht zu Propellergröße zu Propelleranzahl?
...
4. Wirbelring-Stadium durch Regelungstechnik ausgleichen
Das habe ich in einigen Foren gelesen aber meiner Meinung ist das Schwachsinn und kann nicht funktionieren. Das wäre für den Regler so, als wenn er einen sich schnell in der Zollzahl ändernden Propeller steuern müsste, der sich dazu noch vollkommen unregelmäßig verhält.
...
Gruß, Markus
...
An dieser Stelle würden mich Erfahrungswerte von Langzeitcopterpiloten interessieren, welche Copter in verschiedenen Konfigurationen geflogen sind. Gibts da ne Faustregel bei der Auslegung, um Eiertanz zu vermeiden? Zum Beispiel Verhält nis Gewicht zu Propellergröße zu Propelleranzahl?
...
4. Wirbelring-Stadium durch Regelungstechnik ausgleichen
Das habe ich in einigen Foren gelesen aber meiner Meinung ist das Schwachsinn und kann nicht funktionieren. Das wäre für den Regler so, als wenn er einen sich schnell in der Zollzahl ändernden Propeller steuern müsste, der sich dazu noch vollkommen unregelmäßig verhält.
...
Gruß, Markus
ich kann dir aus erfahrung sagen das da auch die "regelfreudigkeit" eine große rolle spielt. zum einen hängt es neben der strahlgeschwindigkeit auch sehr stark vom drehmoment/probgrößen verhältnis ab.
z.B. wackelt ein copter mit 2206 (1200kV), 8x4 und 3S wesentlich mehr als ein copter mit 2212 (1000KV) 8x4 und 3S
und die paar gramm unterschied werdens nicht machen .. ich bin mir recht sicher das es einfach daran liegt, das der stärkere motor den gleichen propeller schneller beschleunigen und bremsen kann.
ausserdem helfen ESC's die complementäres PWM haben.. weil diese eben auch aktive runterregeln können.
ich mach da nächste woche gerne mal ein paar vergleich videos
gruß
Felix
Hallo Markus,
erstmal auch von mir den allergrößten Respekt, was Du da auf die Beine gestellt hast ist echt krass
Naja, eigentlich hat er gefragt was Deine Entwicklung beim Gieren macht. Das ist ja das Drehen um die eigene Achse.
Das kann man eigentlich öfter sehen, zumindest bei den Steuerungen die ich bis jetzt eingesetzt habe war dieses Verhalten immer zu beobachten. Zwar oft nur "ein wenig", aber so wirklich auf der aktuellen Höhe blieb keine der Steuerungen.
-Jens
erstmal auch von mir den allergrößten Respekt, was Du da auf die Beine gestellt hast ist echt krass
Was mich persönlich interessieren würde, wären folgende Flugmanöver:
1. Schweben auf der Stelle und dann voll Gier rechts und dann links rein. Was macht der? Nur Gieren, oder dabei steigen/fallen?
1. Schweben auf der Stelle und dann voll Gier rechts und dann links rein. Was macht der? Nur Gieren, oder dabei steigen/fallen?
@Heliflieger: Deine zweite (eigentlich ja erste Frage) hab ich eben ganz vergessen. Und zwar hast Du geschrieben, dass Du es bisher immer gesehen hast, das Copter beim Rollen / Pitchen entweder gleichzeitig absinken oder aufsteigen.
Das kann man eigentlich öfter sehen, zumindest bei den Steuerungen die ich bis jetzt eingesetzt habe war dieses Verhalten immer zu beobachten. Zwar oft nur "ein wenig", aber so wirklich auf der aktuellen Höhe blieb keine der Steuerungen.
-Jens
Landegestell ist fertig
Hallo!
Erstmal möchte ich mich bei Euch für das Posten Eurer Erfahrungen bzgl des Wirbelring-Stadiums (Eiertanz) bedanken. Ich kann mir gut vorstellen, dass die "Schärfe" des Reglers einen großen Einfluss hat. Das konnte ich auch festellen, denn mit kleinerem P Anteil trat es bei mir auch weniger auf.
Ich werde bestimmt später nochmal den ein oder anderen Post durchgehen.
Dann hab ich heute endlich mal wieder 100% Praxis. Und zwar sind die Teile für das Landegestell fertig gefräst (Danke Hadwin!). Ich habe mich heute dran gemacht und es zusammengebaut. Am besten Ihr schauts Euch einfach auf den Bildern an.
Gruß, Markus
Hallo!
Erstmal möchte ich mich bei Euch für das Posten Eurer Erfahrungen bzgl des Wirbelring-Stadiums (Eiertanz
) bedanken. Ich kann mir gut vorstellen, dass die "Schärfe" des Reglers einen großen Einfluss hat. Das konnte ich auch festellen, denn mit kleinerem P Anteil trat es bei mir auch weniger auf. Ich werde bestimmt später nochmal den ein oder anderen Post durchgehen.
Dann hab ich heute endlich mal wieder 100% Praxis. Und zwar sind die Teile für das Landegestell fertig gefräst (Danke Hadwin!). Ich habe mich heute dran gemacht und es zusammengebaut. Am besten Ihr schauts Euch einfach auf den Bildern an.
Gruß, Markus
Anhänge
-
 418,4 KB Aufrufe: 62
418,4 KB Aufrufe: 62 -
 416,1 KB Aufrufe: 68
416,1 KB Aufrufe: 68 -
 398,5 KB Aufrufe: 61
398,5 KB Aufrufe: 61 -
 322,7 KB Aufrufe: 60
322,7 KB Aufrufe: 60 -
 371,4 KB Aufrufe: 78
371,4 KB Aufrufe: 78
- Status
- Nicht offen für weitere Antworten.

