
Rabbit Flight Controller
- Themenstarter der-Frickler
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Gestern ging es spontan noch etwas weiter - eigentlich wollte ich gar nix mehr machen weil zu K.O.
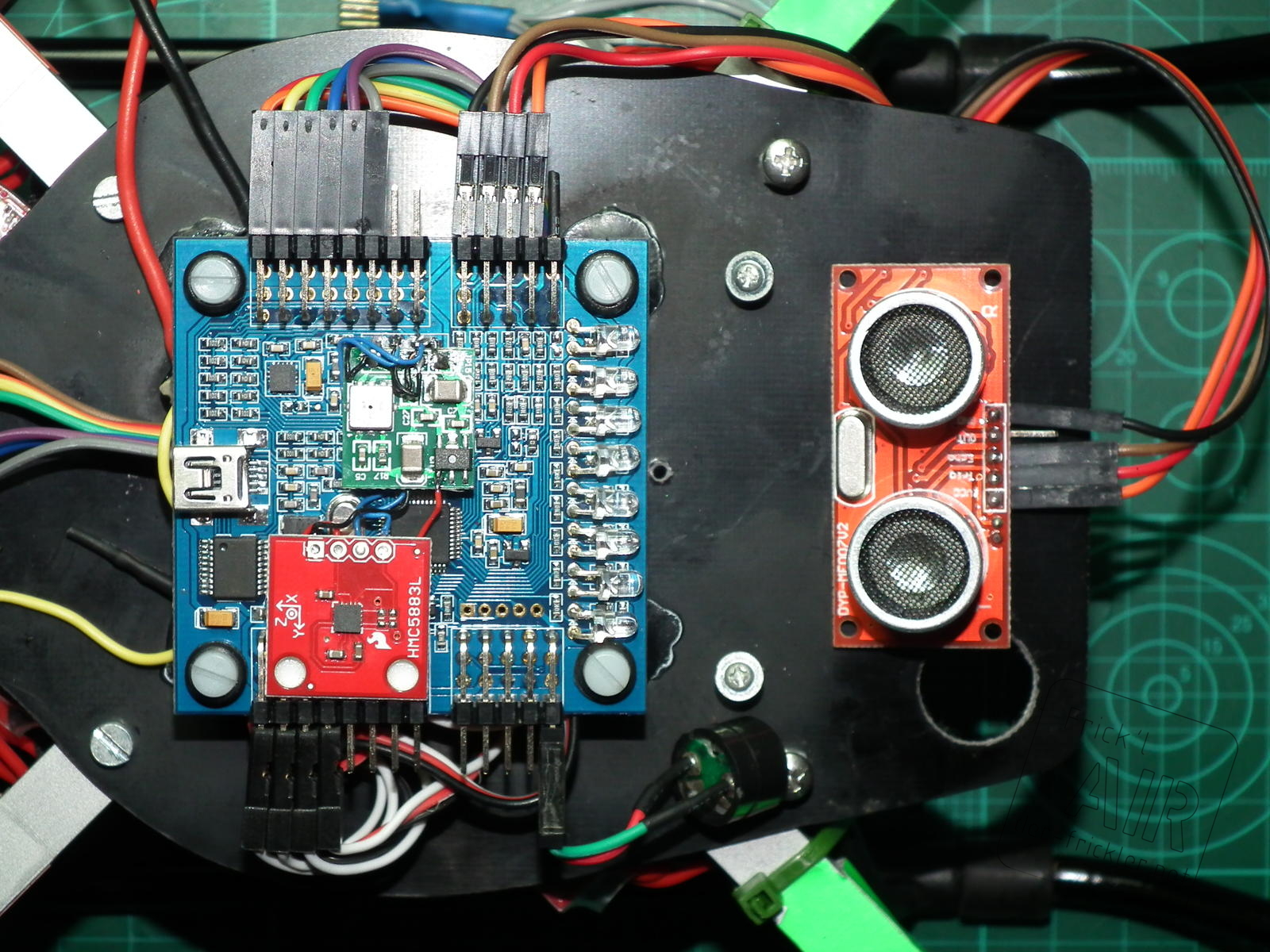
[size=xx-small]Och, einfach mal den Ultraschallsensor der hier noch rumlag anstecken, der hat zwar einen Pin mehr, aber auf dem Board und am Sensor finden sich je 4 passende ;_). Noch schnell in der Software aktivieren und... Selbtcheck zeigt an US vorhanden und betriebsbereit. [/size]
ACHTUNG NACHTRAG!
Mit der neuen Software geht der 5-polige Rote Ultraschall-Sensor leider nicht mehr, es wird in der GUI immer abwechselnd der MEsswert und 1500 bzw. 2000 angezeigt. Der Blaue HC-SR04 von ebay funktioniert hingegen!
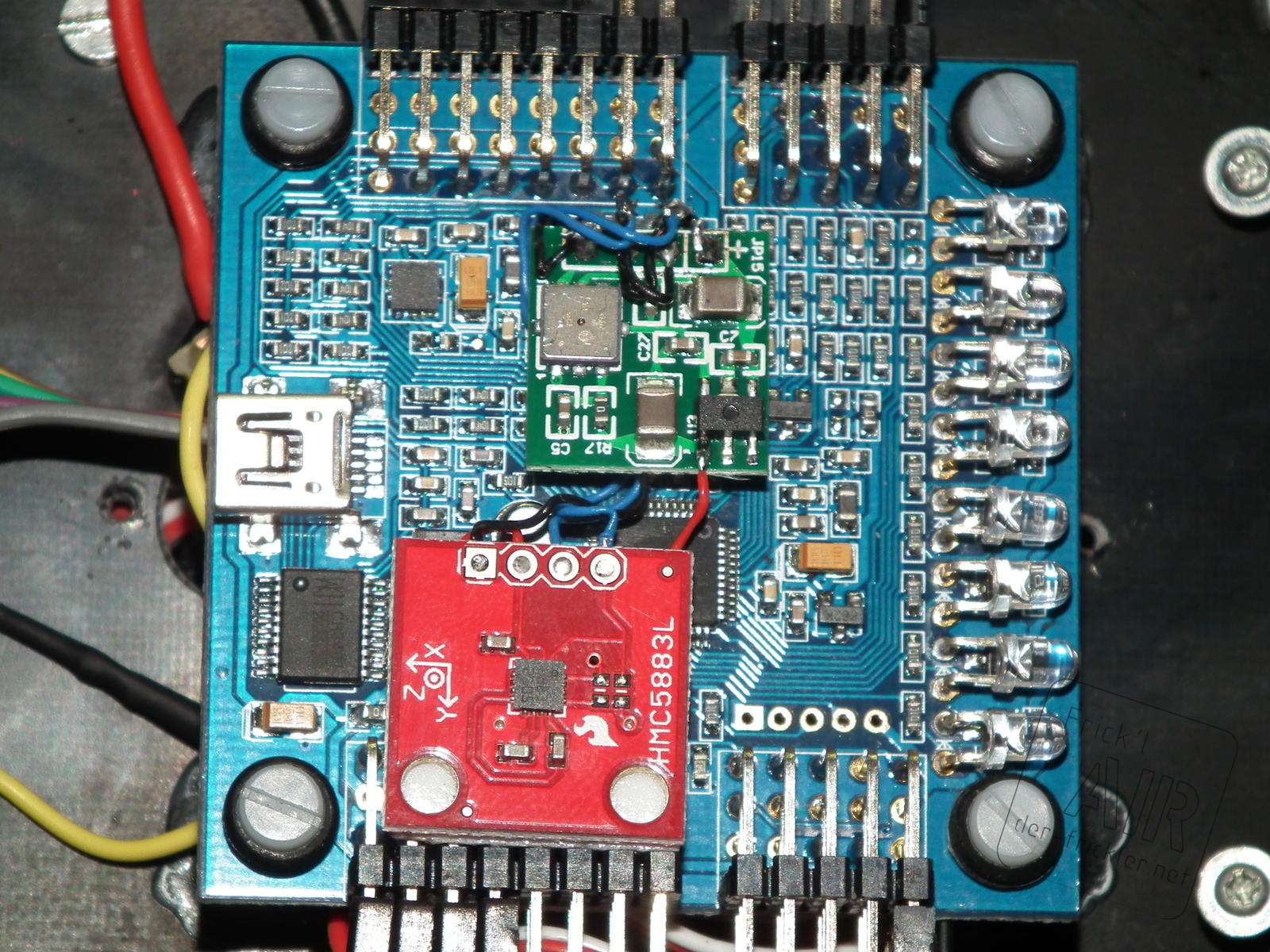
Nun gut, mmmmh der FrSky Sensor Baro könnte von den Pins her genauf auf den 4-pinheader auf dem Board passen, VCC und GND Belegung passt schonmal. Aufgesteckt, angelötet, tut nix, ok, sind wohl SDA und SCL vertauscht, wieder ab, die beiden I2C Leitungen vertauscht und siehe da, Aktivieren und Selbtcheck zeigt an Barometer vorhanden und betriebsbereit.
Also weiter im Text, Kompass rausgesucht. Ich wollte ihn schon gerade anlöten als mir auffiel das der ja 3,3V braucht, also 3,3V VCC am Regler auf dem Baro-Board abgegriffen, GND, SAL und SCL an den Pinheader und wieder in der Software aktivieren, wie solls anders sein: Selbtcheck zeigt an Kompass vorhanden und betriebsbereit. Der muss jetzt nur noch nach Anleitung 1x initialisiert werden.
Morgen ist Testflug und danach werde ich mal versuchen ob das GPS auch was von sich gibt.
P.S. Nein, der Ultraschall misst nicht den Abstand zur Sonne oder Wolkendecke, der wird noch unten drunter montiert!
[size=xx-small]Och, einfach mal den Ultraschallsensor der hier noch rumlag anstecken, der hat zwar einen Pin mehr, aber auf dem Board und am Sensor finden sich je 4 passende ;_). Noch schnell in der Software aktivieren und... Selbtcheck zeigt an US vorhanden und betriebsbereit. [/size]
ACHTUNG NACHTRAG!
Mit der neuen Software geht der 5-polige Rote Ultraschall-Sensor leider nicht mehr, es wird in der GUI immer abwechselnd der MEsswert und 1500 bzw. 2000 angezeigt. Der Blaue HC-SR04 von ebay funktioniert hingegen!
Nun gut, mmmmh der FrSky Sensor Baro könnte von den Pins her genauf auf den 4-pinheader auf dem Board passen, VCC und GND Belegung passt schonmal. Aufgesteckt, angelötet, tut nix, ok, sind wohl SDA und SCL vertauscht, wieder ab, die beiden I2C Leitungen vertauscht und siehe da, Aktivieren und Selbtcheck zeigt an Barometer vorhanden und betriebsbereit.
Also weiter im Text, Kompass rausgesucht. Ich wollte ihn schon gerade anlöten als mir auffiel das der ja 3,3V braucht, also 3,3V VCC am Regler auf dem Baro-Board abgegriffen, GND, SAL und SCL an den Pinheader und wieder in der Software aktivieren, wie solls anders sein: Selbtcheck zeigt an Kompass vorhanden und betriebsbereit. Der muss jetzt nur noch nach Anleitung 1x initialisiert werden.
Morgen ist Testflug und danach werde ich mal versuchen ob das GPS auch was von sich gibt.
P.S. Nein, der Ultraschall misst nicht den Abstand zur Sonne oder Wolkendecke, der wird noch unten drunter montiert!
Aber soll man den baro nicht mit bissl Schaumstoff vor Sonne und Wind Schutzen?!
Ich mache das immer mit einem Stück Schaumstoff über dem Sensor und dann Schlumpfschlauch
 : drum
: drumGruß Karsten
P.S.: Johannes, ich bin echt gespannt, wie das Teil fliegt.. vor allem, ob die Geschichte mit dem GPS funktioniert.
der-Frickler hat gesagt.:
Genau, ohne dich wäre er gestern schon autonom im dunkeln mit GPS durch die Stadt geflogen
habe mir deinen Baubericht und die Fotos des Y4 mal angeschaut,
sehr sauber und aufgeräumt, muß dich loben. Wenn denn mein ff da ist und ich alles händeln kann, könnte der Rabbit mein nächstes Projekt werden.
Scheint ja ohne viel Proggen zu müssen, auf verschiedene modis einstellbar zu sein.
Danke fürs Lob!
Jepp, da musst eine Combobox umstellen. Hatte das Board schon kurz auf dem Y4. Steuerung passte, nur die Motorhalter waren noch zu weich und fingen das schwingen an.
Hab gestern welche aus 3mm CFK/GFK gemacht, das sollte helfen.
Krasi hat gesagt.:
Scheint ja ohne viel Proggen zu müssen, auf verschiedene modis einstellbar zu sein.
Hab gestern welche aus 3mm CFK/GFK gemacht, das sollte helfen.
Jepp, da musst eine Combobox umstellen. Hatte das Board schon kurz auf dem Y4. Steuerung passte, nur die Motorhalter waren noch zu weich und fingen das schwingen an.
Hab gestern welche aus 3mm CFK/GFK gemacht, das sollte helfen.
[/quote]
Aha, OK,
und durch den Kontra Rotating BL entfällt das Servo, sehe ich das richtig? Wie wird der an den Rabbit angeschlossen?
Hab gestern welche aus 3mm CFK/GFK gemacht, das sollte helfen.
[/quote]
Aha, OK,
und durch den Kontra Rotating BL entfällt das Servo, sehe ich das richtig? Wie wird der an den Rabbit angeschlossen?
Soo, eben hat die Platine die ersten Außentests mit Bravur bestanden.
Schwebeflug ist prima ruhig, vergleichbar mit der OpenPilot CC. Der angelötete Kompass scheint zu funktionieren, ich habe NULL Drift auf YAW, sowas hatte ich bis dato bei keiner Platine. Mit aktiviertem Höhe-Halten lässt sich im cm Bereich über den Boden schweben, sobald man den Gasknüppel nicht mehr bewegt wird die Höhe gelockt. Über 2-3m scheint dann der Baro einzusteigen, hier funktioniert das Höhe halten auch, aber er pendelt schon so 2-3m würde ich sagen.
Mein bisheriges Fazit: Empfehlenswert!
super einfach einzustellen (nur die Copter Art und das wars ;-) )
schwebt sehr stabil, geht aber auch gut vorwärts.
erweiterbar mit Baro, Kompass, Ultraschall und evtl GPS.
weniger als halber Preis der OpenPilot (und vor allem verfügbar)
Denke jetzt wird der Y4 fertig gemacht damit ich auch mal das Camstabi testen kann.
Schwebeflug ist prima ruhig, vergleichbar mit der OpenPilot CC. Der angelötete Kompass scheint zu funktionieren, ich habe NULL Drift auf YAW, sowas hatte ich bis dato bei keiner Platine. Mit aktiviertem Höhe-Halten lässt sich im cm Bereich über den Boden schweben, sobald man den Gasknüppel nicht mehr bewegt wird die Höhe gelockt. Über 2-3m scheint dann der Baro einzusteigen, hier funktioniert das Höhe halten auch, aber er pendelt schon so 2-3m würde ich sagen.
Mein bisheriges Fazit: Empfehlenswert!
super einfach einzustellen (nur die Copter Art und das wars ;-) )
schwebt sehr stabil, geht aber auch gut vorwärts.
erweiterbar mit Baro, Kompass, Ultraschall und evtl GPS.
weniger als halber Preis der OpenPilot (und vor allem verfügbar)
Denke jetzt wird der Y4 fertig gemacht damit ich auch mal das Camstabi testen kann.
- Status
- Nicht offen für weitere Antworten.

